・上一文章:诊断及排除宝马发动机故障
・下一文章:分析电控发动机怠速间歇性异常升高故障
汽车巡航控制系统, 英文缩写为CCS (CruiseControl System)。 它是使汽车工作在发动机有利转速范围内, 保持车速恒定并提高行驶舒适性的自动行驶装置。 它能使汽车行驶速度在达到驾驶员的要求时, 开启该装置, 驾驶员不用踩加速踏板, 汽车就会按设定的速度匀速行驶。 采用巡航控制系统,能减轻驾驶员的工作强度, 减少不必要的车速变化, 提高燃油经济性。
巡航控制从机械式控制开始, 经历晶体管控制、 模拟电路控制, 发展到数字控制方式。 自20世纪80年代以来, 数字控制方式已成为巡航控制系统的主流。
为保持汽车巡航控制系统的性能, 各种车型均有严格的检测工艺程序及技术标准。 下面结合2007款Camry轿车巡航控制系统的结构原理, 简要介绍其主要元器件的检测工艺程序及相关技术标准。 图1为2007款Camry轿车巡航控制系统操作控制开关的实物。 2007款Camry巡航控制系统操作控制开关是巡航控制系统最具代表性的实物。 节气门位置传感器、 车速传感器、 执行器即节气门电动机是与其他控制系统共用的。
1 巡航控制系统的控制方案
为了使汽车巡航控制系统达到车速控制的要求, 在控制系统总体方案确定后, ECM (ElectronicControl Module, 电子控制模块 ) 实时控制方案的选择非常关键。 目前用于汽车巡航控制的控制方案主要有PID控制、 模糊控制、 现代学习控制、 自适应控制等, 它们都有各自的特点。
1.1 PID控制
PID (Proportion-Integral-Differential) 控制, 即比例-积分-微分控制, 是根据实际车速与设定车速的偏差, 来实现汽车不变参数的巡航控制。
在汽车行驶过程中, 驾驶员设定一个车速给控制器ECM, 同时车速传感器将测得的实际车速也输入控制器, 产生实际车速和设定车速的偏差 (设为Δv), 控制器的比例部分根据偏差的大小输出相应的控制量, 以控制节气门的开度, 使车速迅速趋近设定车速。 考虑到偏差一直存在, 控制器的积分部分就把偏差积累起来加大控制量, 以消灭偏差, 使车速保持恒定; 而微分部分则起预估作用。
1.2 模糊控制
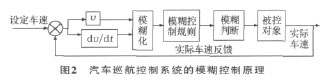
模糊控制原理如图2所示。 模糊控制是一种模仿人工控制活动中人脑的控制策略, 运用模糊数学把人工控制策略通过使用计算机来实现,它是近几年发展起来的一种新型的汽车巡航控制技术。 驾驶员对汽车的控制, 从本质上来说, 是一个模糊控制的过程。 驾驶员驾驶汽车时, 根据设定车速与实际车速之间的偏差及路面情况, 利用自己的经验, 决定加速踏板的变化量, 使汽车的实际车速趋近于设定车速。 用于汽车巡航控制的模糊控制器的输入量一般可选择设定车速与实际车速的偏差以及偏差的变化率。
1.3 现代学习控制
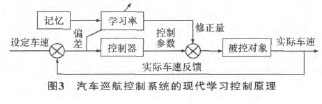
现代学习控制原理如图3所示。 因为汽车巡航行驶中存在着严重的非线性和不确定性, 特别是巡航控制参数在不同车速下其值是不确定的, 并且运动载体对控制的实时性要求较高, 可将现代学习算法应用到汽车巡航控制系统中。 现代学习技术利用实际车速与设定车速的偏差, 通过多次的现代学习计算得出一个修正量, 进一步修正控制器输出的控制量, 使实际车速更趋近于设定车速。

")
")
")
")

