・上一文章:诊断及排除宝马发动机故障
・下一文章:分析电控发动机怠速间歇性异常升高故障
4) RESUME (恢复) 控制
如果用 “停止灯开关” 或将巡航取消开关推向“CANCEL” 取消巡航后, 或者, 如果实际车速在限制范围内时, 将巡航功能控制开关推向+(ACCEL)/RES (RESUME) (加速 / 恢复), 可恢复 “取消” 动作前ECM所记忆的车速, 并保持恒速控制。
2.2.3 退出巡航开关
退出巡航开关包括取消开关 (CANCEL)、 停止灯开关、 驻车制动开关、 离合器开关和空档起动开关。
当巡航控制系统运行时, 执行以下任一开关动作, 可取消巡航: ①踩下制动器踏板; ②踩下离合器踏板; ③自动变速器变速杆从D位置移向N位置,或者变速器在3档、 2档或变速杆在S位置的1档; ④接合取消开关CANCEL; ⑤关断 (压回) 巡航接合开关ON/OFF。
2.3 执行器 (节气门电动机)
Camry巡航控制系统的执行器是节气门电动机,其作用是将ECM送来的电信号转变为节气门开度。节气门电动机结构如图14所示。
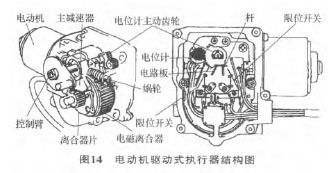
节气门电动机的工作原理: 电动机经蜗轮减速器和离合器啮合, 离合器输出齿轮又与控制臂轴上的扇形齿啮合, 以此驱动控制臂来转动节气门, 实现节气门开度控制。
电动机按巡航控制器ECM的信号进行节气门开度调节, 任一个退出巡航开关起作用, 立刻将电磁离合器分离, ECM无法再调节节气门开度。
2.4 巡航控制器ECM (ECU)
巡航控制器ECM由处理芯片、 A/D、 D/A、 重置驱动、 保护电路等组成。 ECM要满足巡航控制使用要求, 必须具备下列功能。
1) 巡航控制基本功能
当运行巡航时, ECM将车速传感器传送的实际车速与巡航系统设定的车速存储值相比较。 当实际车速大于存储的车速值时, ECM向节气门电动机发出指令关闭节气门; 当实际车速小于存储的车速值时, ECM向节气门电动机发出指令开启节气门。
2) 极限控制功能
低车速限制, 即最低车速极限设定为40 km/h。当巡航控制系统处于运行中而车速降至低于低速极限40 km/h时, 巡航运行将自动取消, 但存储的车速值会保存。
高车速限制, 即最高车速极限设定为200km/h。当实际车速高于高速极限时, 巡航控制系统不工作。 同样,+(ACCEL)/RES(RESUME) (加速 /恢复)不能用于增加超过高车速限制的车速。
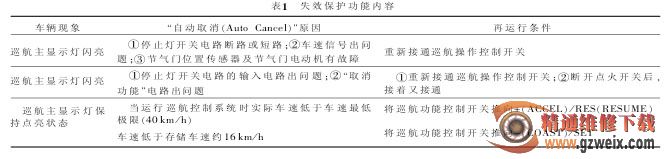
3) 失效保护功能
当巡航控制系统出现故障时, 系统有一个失效保护功能, 即自动取消功能。
车辆在执行巡航时, 如果ECM监测到如表1所示的情况, 巡航控制系统将清除存储在车辆ECM中的车速, 并取消巡航。 失效保护的具体内容见表1。
3 Camry巡航控制系统检测
3.1 系统故障诊断
3.1.1 用解码器读取数据流与故障码
1) 将解码器与DLC3 (Data Link Connector, 自诊断接头) 连接。
2) 接通点火开关 (IG), 起动发动机, 运行车辆, 然后接通解码器的主开关。
3) 接通巡航接合开关, 当巡航功能控制开关推向如图13所示不同的工作位置时, 阅读解码器显示的数据流, 以检查巡航功能控制开关的正常功能执行情况。 在此期间, 解码器将读取表2描述的检测ECM的巡航控制内容, 并显示诊断结果。
")
")
")
")

