・上一文章:汽车空调基础知识
・下一文章:奥迪Q5热车情况下踩制动踏板换D挡时出现连续冲击并耸车现象
三、驾驶辅助系统
1.车道保持辅助系统(Lane Assisit)
(1)功能及组成
车道保持辅助系统的功能是在驾驶员注意力不集中或疲劳驾驶出现车辆偏转时,系统进行主动修正、转向千预;当驾驶员操作转向信号灯时,系统进入被动模式(待机状态)。
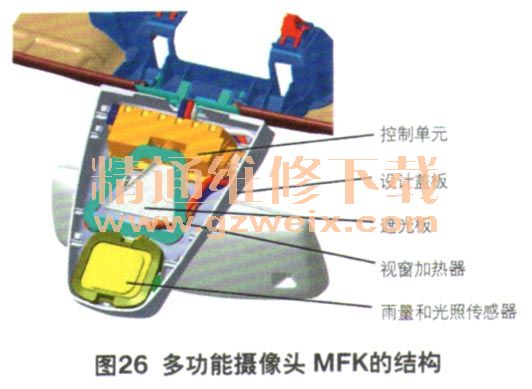
车道保持辅助系统的组成如图25所示。多功能摄像头MFK和控制单元支架固定粘贴在玻璃上,维修时,由于配件整体提供,需要与挡风玻璃一起更换。多功能摄像头MFK的结构如图26所示,用于摄像头的视窗加热器贴在玻璃和控制单元的固定架之间,控制单元是可以单独更换的。换道辅助系统摄像头的视野范围位于挡风玻璃擦拭干净的区域内。

(2)工作原理
车道保持辅助系统在摄像头图像的两个梯形区域中查找车道标识线。车道识别系统在该查找范围内查找灰度突变。由各个识别到的点组成标识线,再由各标识线组成真实的车道。然后,车道保持辅助系统控制单元从真实的车道标识线中计算出虚拟车道。识别出的车道标识线呈绿色,车道标识线中的中断部分呈红色。除此之外,还会识别车道标识线的宽度。(提示:维修时从测量值块中可以推断是否能够识别标识线及其宽度。)
影像摄取传感器所获得的黑白影像由一个影像处理软件进行分析。分析中首先要在影像上寻找车道边界线。如果识别出两侧的车道边界线,那么就会计算车道宽度和车道曲率。另外,该软件还要计算车辆在车道上的位置(就是车辆与左、右车道边界线的距离)以及车辆接近车道边界线的角度。影像处理软件还会评估车道识别的好坏程度。
车道保持辅助系统从确定的车道标识线及车辆内部数据中可确定车道内的车辆位置。如果车辆未打开转向信号灯,即将离开虚拟车道,则车道保持辅助系统会施加一个有时限并且最多为3 N·m的校正转向力矩,以使车辆重新引导至车道中。施加的校正阻力矩的大小取决于与车道标识线的行驶角度大小。干预最长持续10 s,之后系统会进入被动状态。在转向信号灯打开后,车道保持辅助系统被短时切换至被动模式中,直至重新识别到车道为止。驾驶员可以随时克服车道保持辅助系统发出的转向动力矩(校正力矩)。
车道保持辅助系统的激活条件如下。
①最低车速65 km/h。
②车道宽度2.45~4.60 m。
③摄像头必须视线畅通,且必须能够识别车道边界线。
④标识线间距最多2倍于标识线本身长度。
(3)警告信号和故障处理
警告信号及其可能的故障原因如下。
①“车道保持辅助系统目前不可用”
故障原因:CAN总线通讯故障或者控制单元中的温度过高。
②“车道保持辅助系统不可用。目前没有传感器视野”
故障原因:摄像头视窗外侧脏污、结冰或者内侧有雾气,车道上有覆雪、污物或者不能找到车道标识线(超时)。
③“车道保持辅助系统故障”
故障原因:车道保持辅助系统控制单元、电控转向助力系统控制单元或者其他与车道保持辅助系统通信的控制单元有故障。
")
")
")
")

