・上一文章:别克昂科拉换挡背景灯不亮
・下一文章:奥迪A8L仪表多个故障灯点亮、无法挂入挡位
二、自适应巡航(ACC)系统的构造和原理
自适应巡航控制(Adaptive Cruise Control、ACC)系统是一种智能化的自动控制系统,它是在早已存在的巡航控制技术的基础上发展而来的。安装在车头的雷达传感器会感应出前方车辆。电子系统测出两车间距,且会自行计算前方路程的角度情况和相对速度,并判断应保持的最小车距。由ACC对发动机、变速器和制动电子设备进行控制,以适应该距离。另外,ACC还对最大的制动效果进行限制,以告知驾驶人,在某些弯道上行驶速度相对过快,车辆的靠近情况已无法通过该系统来调整。图7所示为自适应巡航系统的操作手柄。

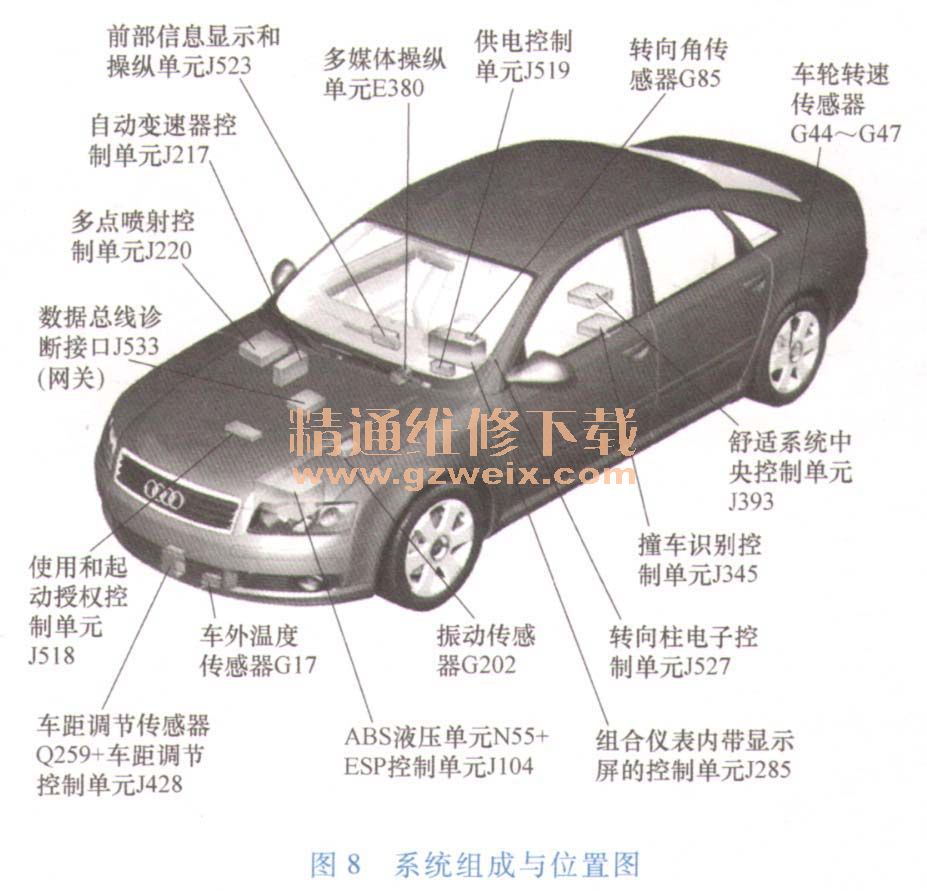
(1)系统组成与位置。
系统组成与位置如图8所示。
(2)车距调节传感器和车距调节控制单元。车距传感器和车距调节控制单元安装在同一壳体内,如图9所示,通过支架上的调节螺栓可以调节车距传感器的安装位置。

(3)自适应巡航系统工作原理概述
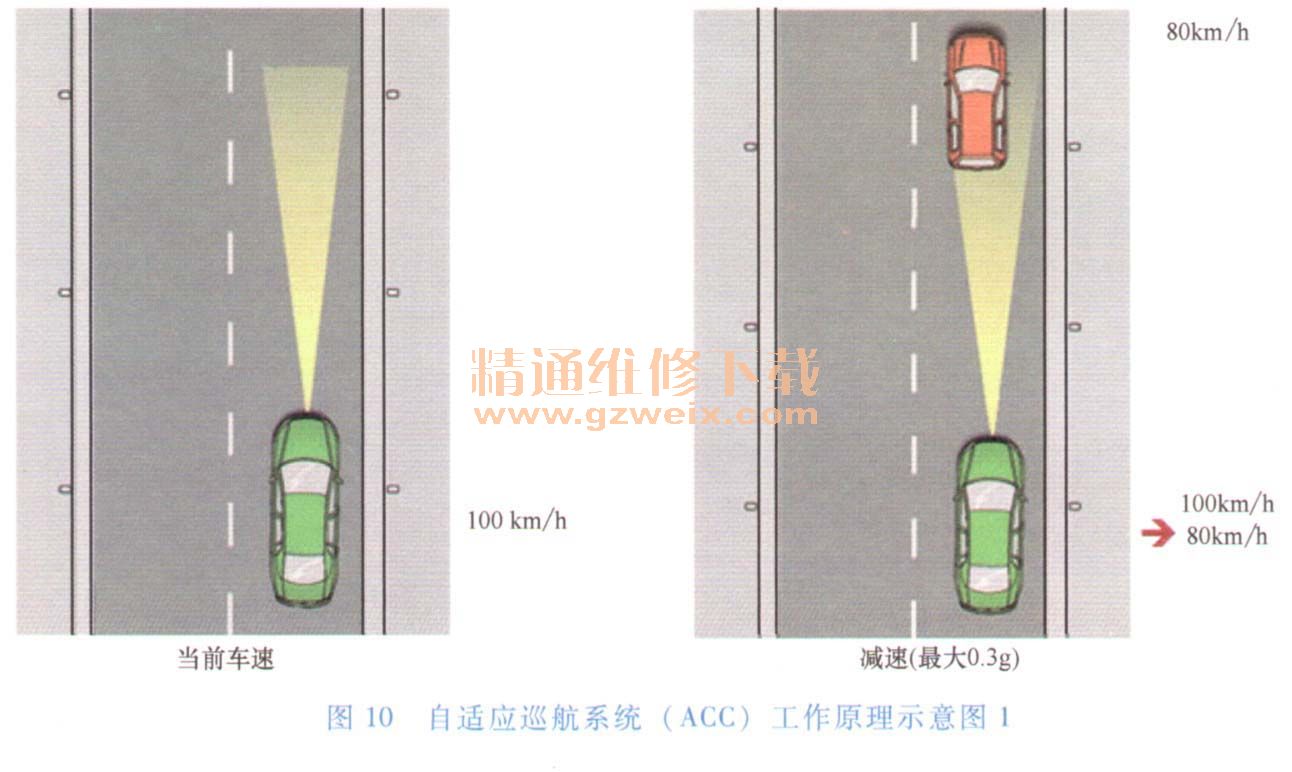
1)当前车速如果传感器检测范围内没有车辆,保持设定车速。
如果装备自适应巡航(ACC)系统的车辆(绿色)前方遇到一台慢车行驶在同一条车道上(红车),则发动机降低转矩,如果有必要,则车辆采取柔和的制动措施,以此将两车车距调节到驾驶人预设的值,该值为受时间控制的值,这个距离在几个阶段内进行调整如图10所示。
制动介人是通过ABS液压泵的方式,出于计算的原因,只能选择同方向行驶的车辆作为参考。
静止的车辆能够被探测到但是不能用于计算,(相对速度与车辆本身速度相同)相对行驶的车辆速度和方向也能被判断出来,但是该测量值也不能用于计算。
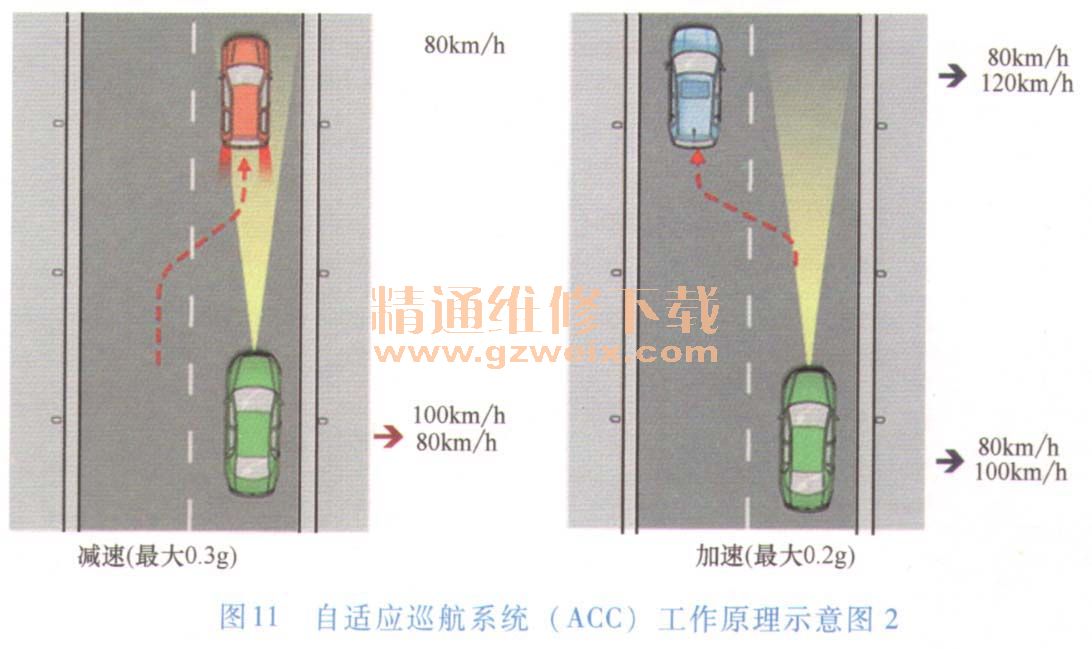
2)如图11所示,这时如果有另一辆车(摩托车)闯入A、B两车之间,那么自适应巡航系统(ACC)施加的制动就不足以使蓝车和摩托车之间的距离达到设定的巡航车距(自适应巡航系统出于舒适性的考虑,制动力只能达到制动系统最大制动减速能力的25%),于是就有声、光警告信号来提醒驾驶人,应踏下制动踏板实施制动。
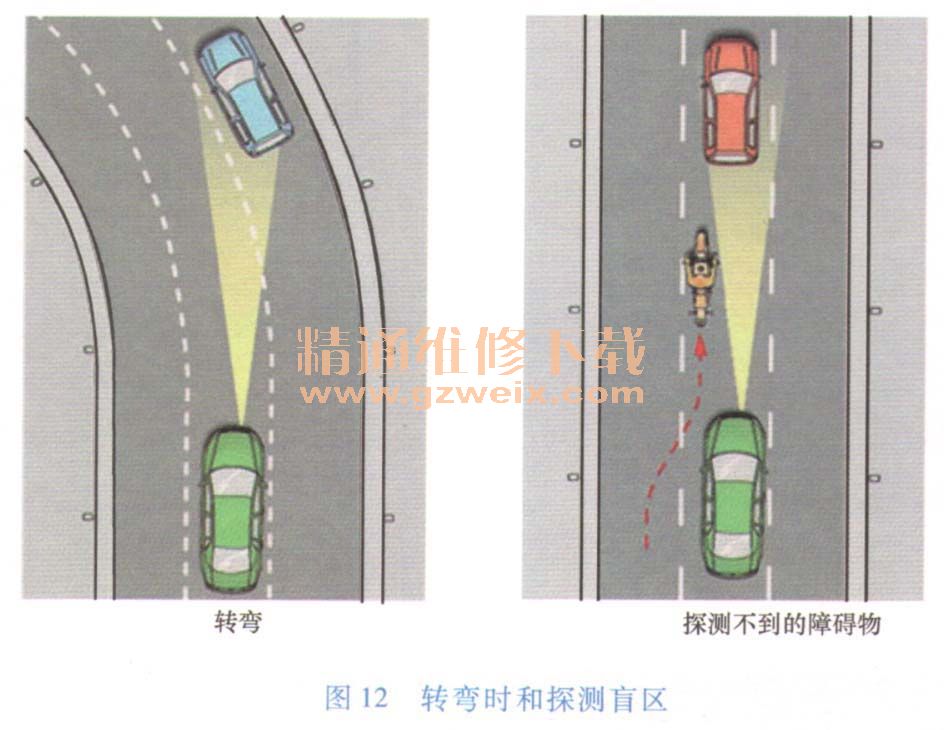
3)如图12所示。在这里所示的交通情况下,尽管绿车的行车道前方没车,但是APC可能会对右侧行车道上行驶的蓝色车作出反应。车道探测的精确度受到车速的影响,车速越高,需要的车距越大,行车道预报的精确度越低。特别是在左转弯时。
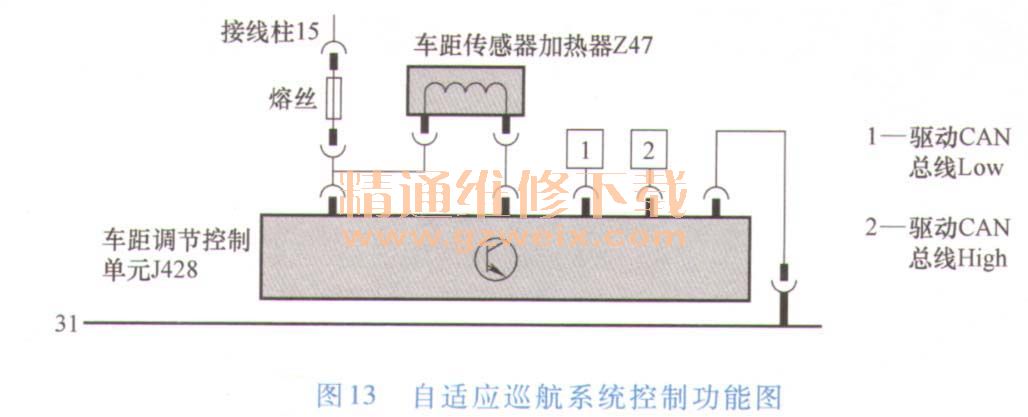
自适应巡航系统控制功能图如图13所示。
")
")
")
")

