・上一文章:电动汽车国标充电报文解析及应用
・下一文章:奥迪Q7有时着车后发动机抖动
三、四轮转向系统的构造和工作原理
3 .1四轮转向系统的基本结构和工作原理
四轮转向系统前轮采用传统转向系统,后轮采用直接助力式电动转向系统。
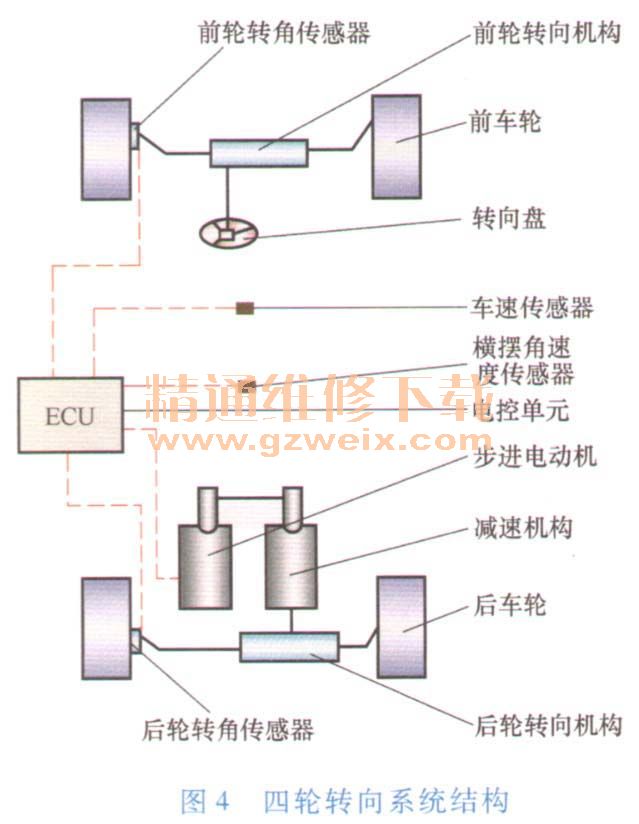
转向时,前轮转角、车速、横摆角速度传感器等信号送入ECU进行分析计算,ECU确定后轮转角并向步进电动机输出驱动信号,通过后轮转向机构驱动后轮偏转以适应前轮转向,实现四轮转向。四轮转向系统结构如图4所示。
转向时,传感器将前轮转向的信号和汽车运动的信号送人ECU、ECU进行分析计算,向步进电动机输出驱动信号,步进电动机动作,通过后轮转向机构控制驱动后轮偏转。同时,ECU进行实时监视汽车状况,计算目标转向角与后轮实际转向角之间的差值,来实时调整后轮的转角。这样,可以根据汽车的实际运动状态,实现汽车的四轮转向。系统设有两种转向模式,既可进人四轮转向状态,也可保持传统的两轮转向状态,驾驶人可通过驾驶室内的转向模式开关进行选择。当四轮转向汽车在行驶过程中电子控制系统出现故障时,后轮自动回到中间位置,汽车自动进入前轮转向状态,保证汽车像普通前轮转向汽车一样安全地行驶。同时,仪表板上的“4WS”指示灯亮,警告驾驶人,故障情况被存储在ECU中,以便于维修时检码。
上述的电控电动式四轮转向系统后轮转向装置属于车速感应型,其工作特点是后轮偏转的方向和转角大小主要受车速的控制,同时也响应前轮转角、横摆角速度的变化。ECU根据设定的控制策略,通过程序控制,实现汽车的四轮转向。在低速行驶或者转向盘转角较大时,前、后轮实现逆相位转向,且后轮偏转角度随前轮转角增大而在一定范围内增大。这种转向方式可改善汽车低速时的操纵轻便性,减小汽车的转弯半径,提高汽车的机动灵活性。在中、高速行驶或转向盘转角较小时,前、后轮实现同相位转向。使汽车车身的横摆角速度大大减小,可减小汽车车身发生动态侧偏的倾向,提高汽车高速行驶的操纵稳定性。
3.2 四轮转向系统的主要部件
(1)传感器传感器的功用是检测汽车转向时的有关运动物理量,并转换成电信号,输入到ECU中,供其进行分析计算。
1)前、后轮转角传感器。前、后轮转角传感器分别安装在前、后轮转向机构靠近车轮的一侧,采用非接触型霍尔元件传感器,用来检测前、后车轮的瞬时偏转角。
2)车速传感器。车速传感器安装在车速里程表的转子附近,采用光电式车速传感器,将汽车前进速度检测出来,脉冲信号的形式输出,送入四轮转向系统ECU,同时将电信号输入到自动变速器ECU。
3)车身横摆角速度传感器。车身横摆角速度传感器安装在汽车质心处的车身上,采用压电射流角速度传感器,检测汽车转向行驶时的车身横摆角速度,以电信号的形式输人ECU、ECU输出控制信号,实时控制汽车的转向运动,保证汽车转向行驶时的动态稳定性。
(2)电控单元(ECU) ECU是4WS系统的核心,其功用是根据制订的控制方案,按照编制的程序对各种传感器输人信号进行分析、计算、处理,输出一定的控制信号指令,驱动步进电动机动作。4WS系统ECU主要由输入信号调理电路、微处理器、输出信号处理电路、电源电路等硬件部分和控制程序、软件平台等软件部分组成。为保证控制系统可靠地工作,电控单元还必须采取有效的抗干扰措施和故障自诊断处理措施。
(3)步进电动机电动机采用步进电动机,其功用是根据ECU的指令输出适宜的转矩和转角,驱动后轮转向机构,控制后轮的转向,是后轮转向系统中的驱动执行元件。步进电动机是一种数字控制电动机,将数字式电脉冲信号转换成角位移,控制性能好,非常适合于单片机控制。采用步进电动机的主要优点是:步进电动机的角位移与输入脉冲数严格成正比,随动性好,可与角度反馈环节组成高性能的闭环数控系统;动态响应快,易于实现起停、正反转及变速;具有自锁和保持转矩能结构简单,坚固耐用,抗干扰能力强。
")
")
")
")

