・上一文章:宝马车系6HP和8HP自动变速箱的区域漏油检查方法
・下一文章:小松挖掘机空调空调吹风量少
一、后桥横力矩分配
1.概述
注意一体式底盘管理系统(ICM)的诊断提示。在各种监控(故障)时,当车辆进入待机状态后才可重新启动ICM中的故障识别。因此现存的故障在维修后车辆进入休眠状态后才能删除。
如果在维修后删除故障记忆时出现问题,按以下顺序进行操作:
①在点火开关断开时排除故障。
②接通点火开关,删除故障代码存储器的故障记忆。
③断开点火开关,让车辆进入休眠状态。当启动/停止按钮的照明灯熄灭后,才说明车辆已休眠。
④启动/停止按钮的照明灯熄灭后,等待10s。接着重新接通点火开关。
⑤重新删除故障记忆。
⑥关闭点火开关。指示灯和报警灯熄灭。
后桥横向力矩分配由销售提供,名称为Performance Control(SA2VP或SA7SZ)。后桥横力矩分配有针对性地在后桥的两个车轮之间分配驱动力矩。同时,将传统结构类型的后驱动桥增加2个叠加传动装置。该行星齿轮变速器可以在需要时通过盘式制动器拉入力流。与要求的发动机驱动力矩无关,可以随时在左右后轮之间主动调整一个最大至1800N·m的驱动力矩差值。这个差值作为偏航力矩作用于整车。
优点:优化驾驶方向稳定性以及减小转向力,改善牵引力,提高行驶安全性。
也可以按照与动态行驶情况相反的方式,例如在过度转向车辆中使用该系统。在此代替转入的偏转力矩(敏捷)设置为转出的偏转力矩(稳定)。除了提供转入和转出的偏转力矩外,后桥横向力矩分配还用于改善牵引力。驱动轮位于不同摩擦系数的路面上时,驱动力矩转移到牵引力潜力较高的车轮上。
2.部件简短描述
下面说明用于后桥横力矩分配的部件。
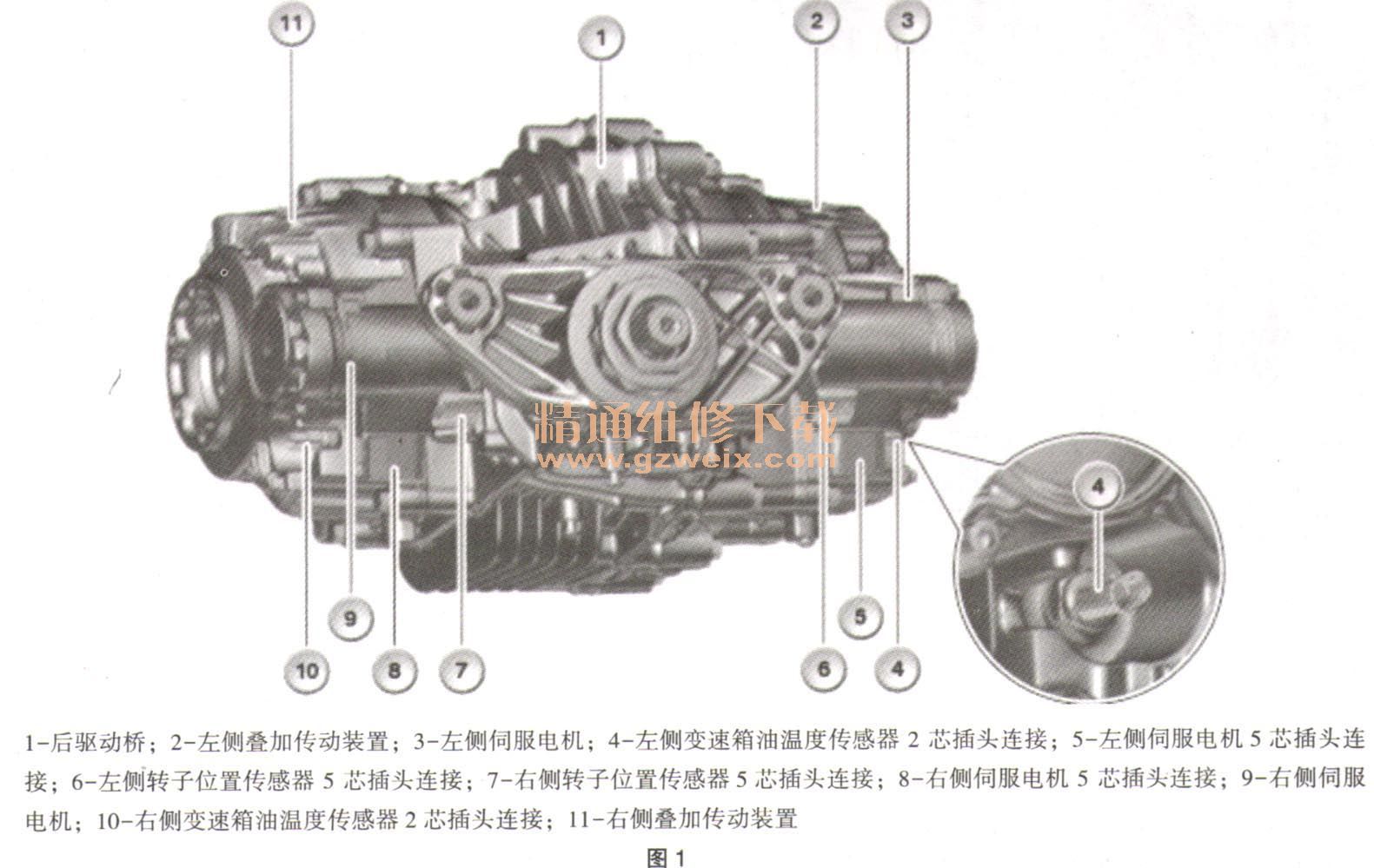
带2个叠加传动装置的后驱动桥。后驱动桥有3个油室,它们使用同一个通风装置。油室按如下方式分配:一个油室用于左侧叠加传动装置;一个油室用于右侧叠加传动装置;一个油室用于差速器。
后驱动桥上的2个叠加传动装置主要由下列部件组成:伺服电机、多片式制动器、带滚珠斜面的压盘、行星齿轮组(特点:不带内齿轮的行星齿轮组)。
后驱油桥见图1。
QMVH控制单元。后驱动桥上额外的执行器由QMVH控制单元控制(QMVH表示后桥横向扭矩分配)。在QMVH控制单元中安装有2个处理器。处理器控制左侧伺服电机。另一个处理器控制右侧伺服电机。此外,每个处理器还监控另一个处理器的输出信号。
QMVH控制单元中安装的大功率半导体起末级作用。因为伺服电机是交流电动机(异步电动机),借助这些末级产生相电压。如果相电压断开(例如在识别到故障时),则伺服电机不再受控,但伺服电机的轴可自由旋转。
QMVH控制单元见图2。
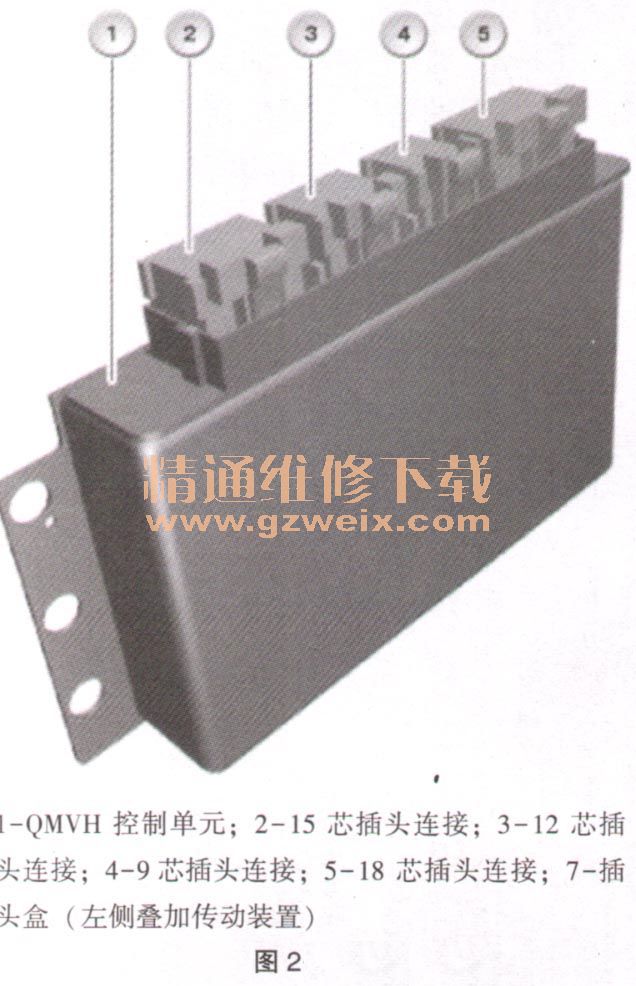
插头连接内的线脚编号首先从上向下,然后从左向右。
下列作动器和传感器直接与QMVH控制单元连接:左侧和右侧伺服电机、伺服电机中的温度传感器、转子位置传感器、齿轮油温度传感器、左侧和右侧伺服电机。
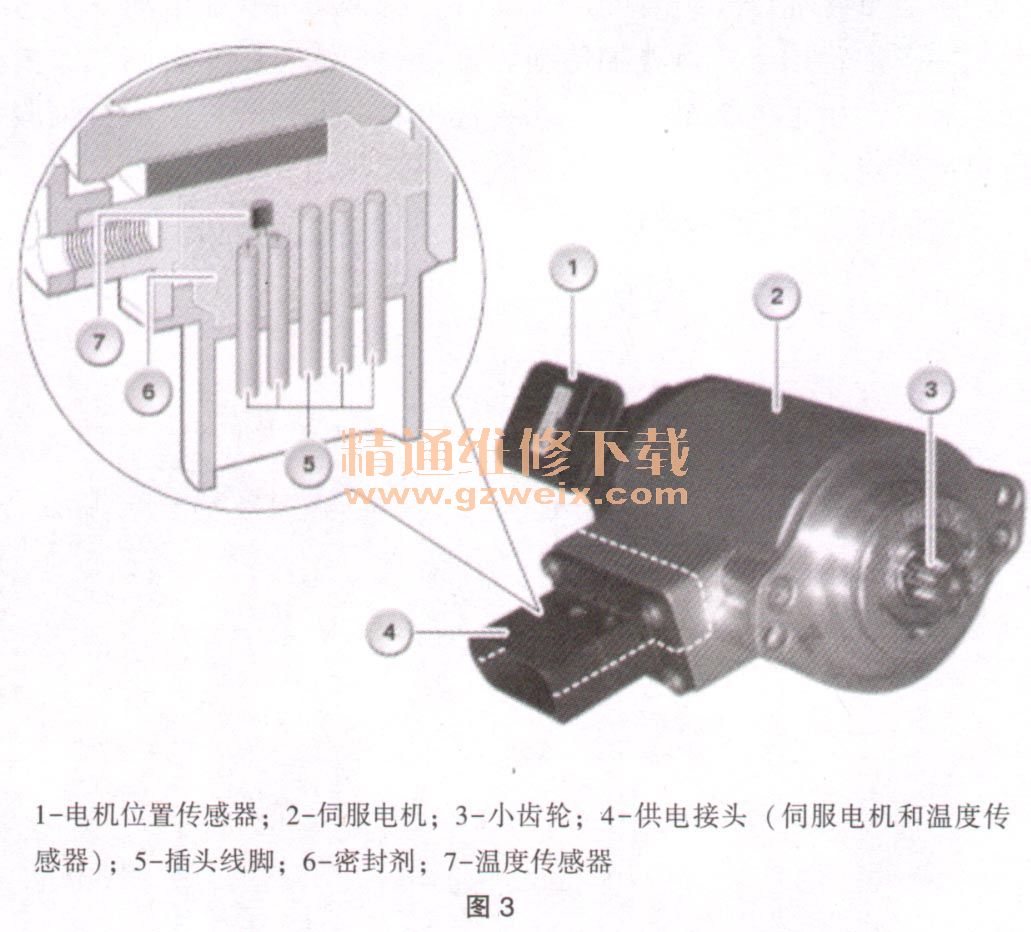
2个伺服电机是交流电机(异步电动机)。左侧伺服电机和右侧伺服电机不是同类件。伺服电机的接头已进行不同设码。因此,伺服电机不会混淆或错误连接。
通过安装位置,伺服电机可以接触后驱动桥油。伺服电机的整个转子必须在油中旋转。
在拆卸伺服电机时可能机油溢出。在更换伺服电机时可能有少量油溢出。这个齿轮油量与后驱动桥中的总齿轮油量相比非常少,因此不需要添加后桥齿轮油。
在伺服电机中集成有一个温度传感器。温度传感器安装在用于伺服电机壳体与插头之间密封的密封剂中。得益于密封剂的导热性,该温度传感器处于几乎与伺服电机其余部件相同的温度下。
马达位置传感器见图3。
")
")
")
")

