该系统使用安装在后视镜旁边的前向立体数字摄像头系统来计算物体与本车之间的距离。系统使用图像处理模块(IPMA)中的软件分析此数据,其工作范围在5km/h和60km/h的车速之间。如果有碰撞危险,系统会通过可视和音频报警信号通知驾驶员。如果确定碰撞不可避免,系统会向驾驶员发出警告,同时系统会自动应用紧急制动。此系统旨在当车速低于50km/h时帮助避免碰撞,并在车速不超过60km/h时减轻碰撞的严重性。
2.AEB功能
AEB的操作如图52所示。
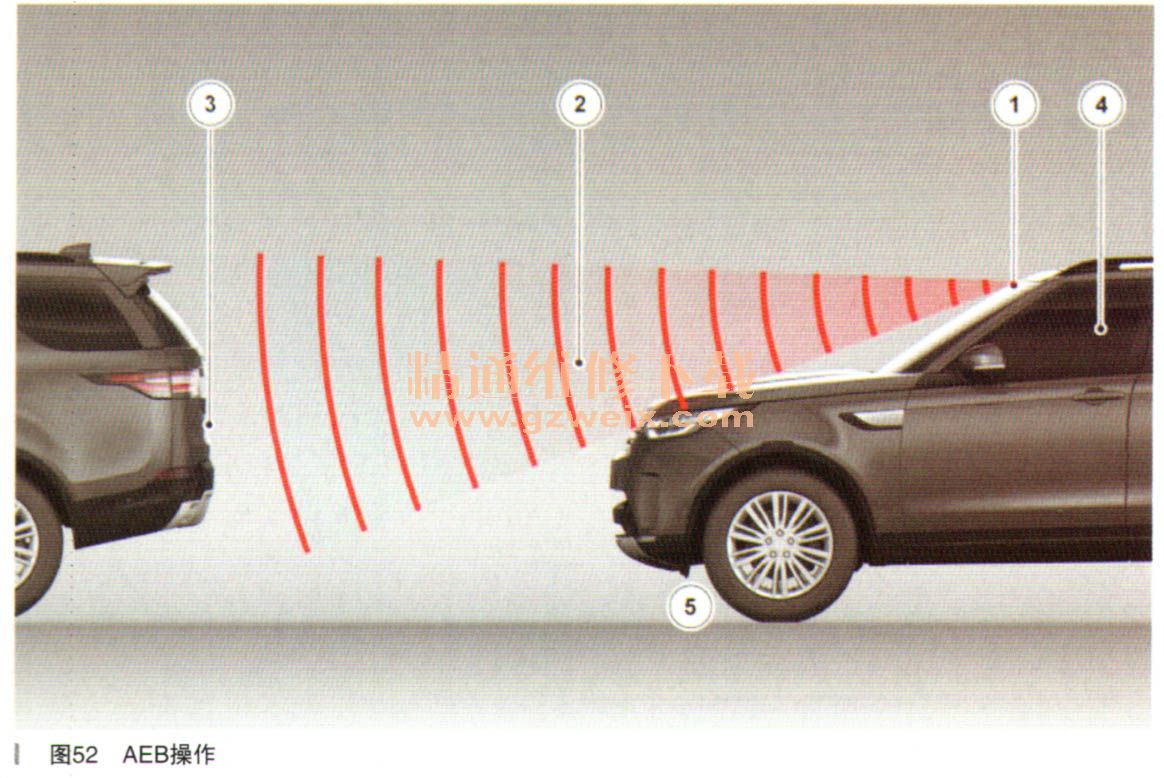
①安装在后视镜旁边的前向摄像头负责观察前方道路;
②摄像头系统持续计算本车与前方车辆之间的接近距离;
③如果系统确定到达前方物体的时间不在安全限值以内且存在碰撞风险,将触发紧急响应;
④在检测到不安全的情形时,系统将立即发出音频信号并闪烁报警灯以提醒驾驶员;
⑤如果驾驶员没有响应车辆警报,系统将自动应用制动系统以避免碰撞。
PAEB包含了与之前使用的AEB功能相同的部件,无须使用任何额外的传感器。通过主动式安全摄像头模块和集成的图像处理模块(IPMA )中的软件来控制其他所有功能。
3.系统范围(如图53所示)
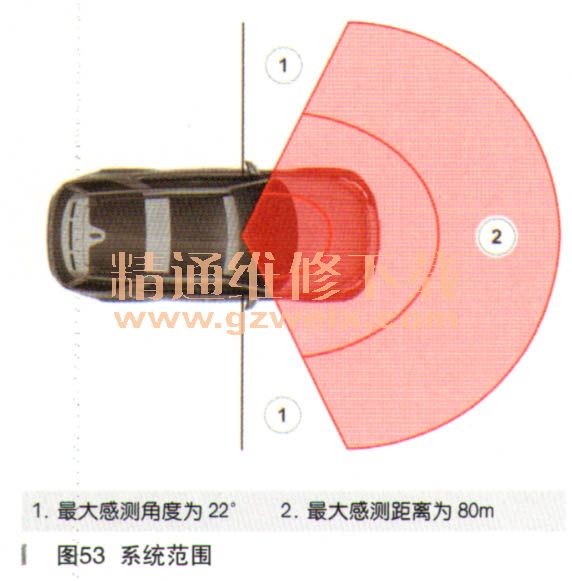
系统被校准为可在22。的最大角度和80m的最大距离内正常运行。在确定可能撞到行人时,该功能提供了自动紧急制动(AEB )。
系统功能如下所示:
(1)驾驶员警报。在接合制动之前会鸣响音频报警,仪表(IC)上将显示可视警报,表明已经确定碰撞风险,但是仍然可由驾驶员避免。如果安装了顶置显示屏控制模块(HUDCM),还会在其上显示视觉警告信息。
(2)预制动。如果临近碰撞的时间更短但仍可以避免,系统会在制动系统上施加少量的压力以消除制动片和制动盘之间的间隙,从而确保可在驾驶员对警报做出反应时提供最佳制动性能。
(3)碰撞缓冲。在确定碰撞风险之后,此功能都将施加制动,从而缓冲碰撞。工作速度范围为5~60km/h。
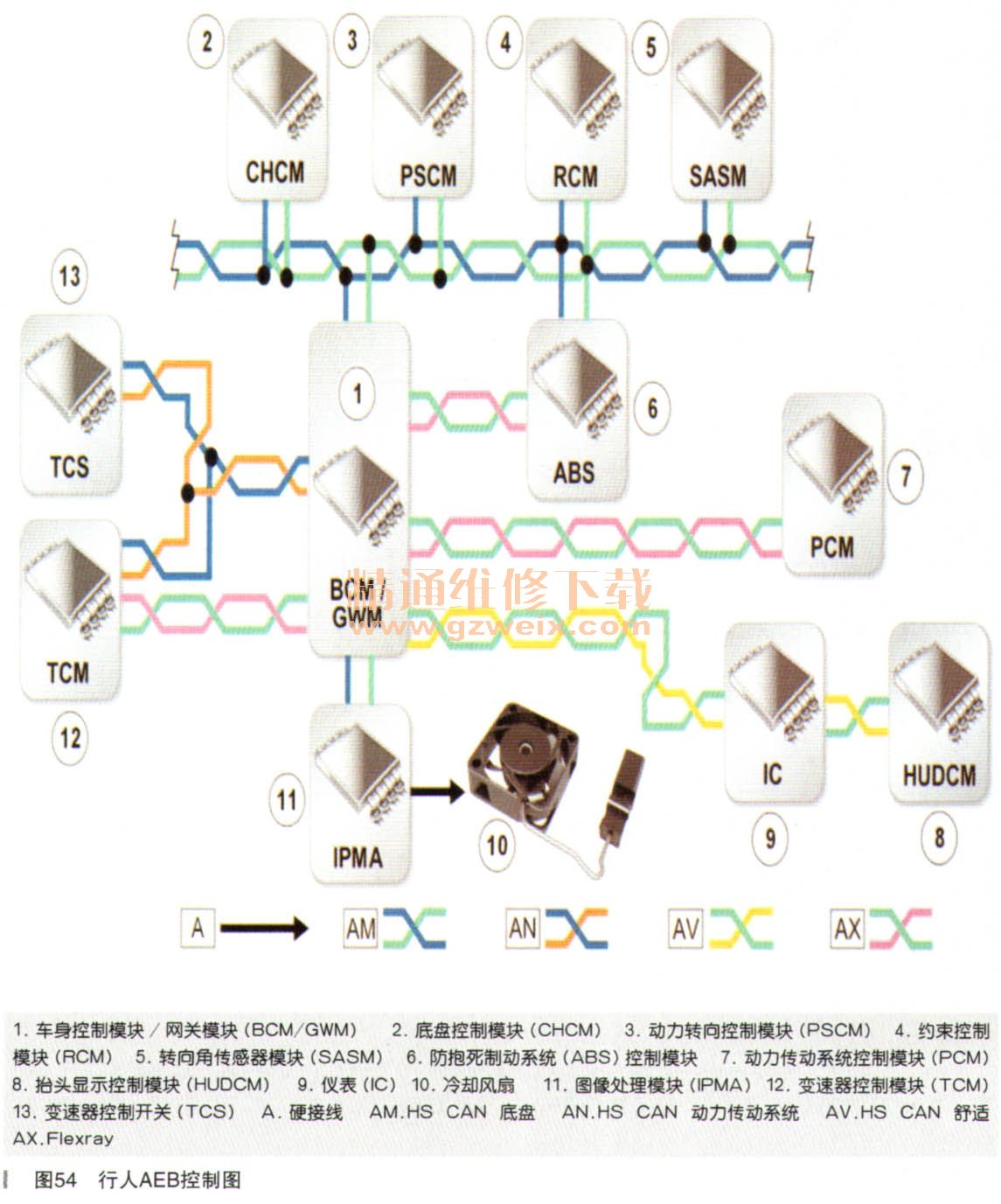
4.行人AEB控制图(如图54所示)
上一页 [1] [2] [3] [4]
")
")
")
")

