后转向角是车速和方向盘角度输入的函数。当车辆以3.5~20km/h之间的低速行驶且方向盘角度为5000时,最大后转向角约为70。在车速从3.5km/h下降的过程中,后转向角将会线性降低,直至降至0km/h时的。“。当车辆高速行驶且方向盘角度约为3000时,最大后转向角仅为0.12°。交叉点为55-60km/h。在达到“交叉”点前,前后车轮彼此反向,使车辆可更紧密地绕其中心点转动,从而减少转弯直径。当速度高于“交叉”点时,前后转向车轮同向。这有助于在车道变更期间保持车辆平衡,以及提高蛇行速度和改善更高车速下的稳定性。同相转向的最大后转向角是2°。控制特性和交叉点随地形模式有所不同。在最高车速不超过7km/h的倒车挡行驶期间,最大后转向角将会线性降至0°。
2.后轮转向控制说明
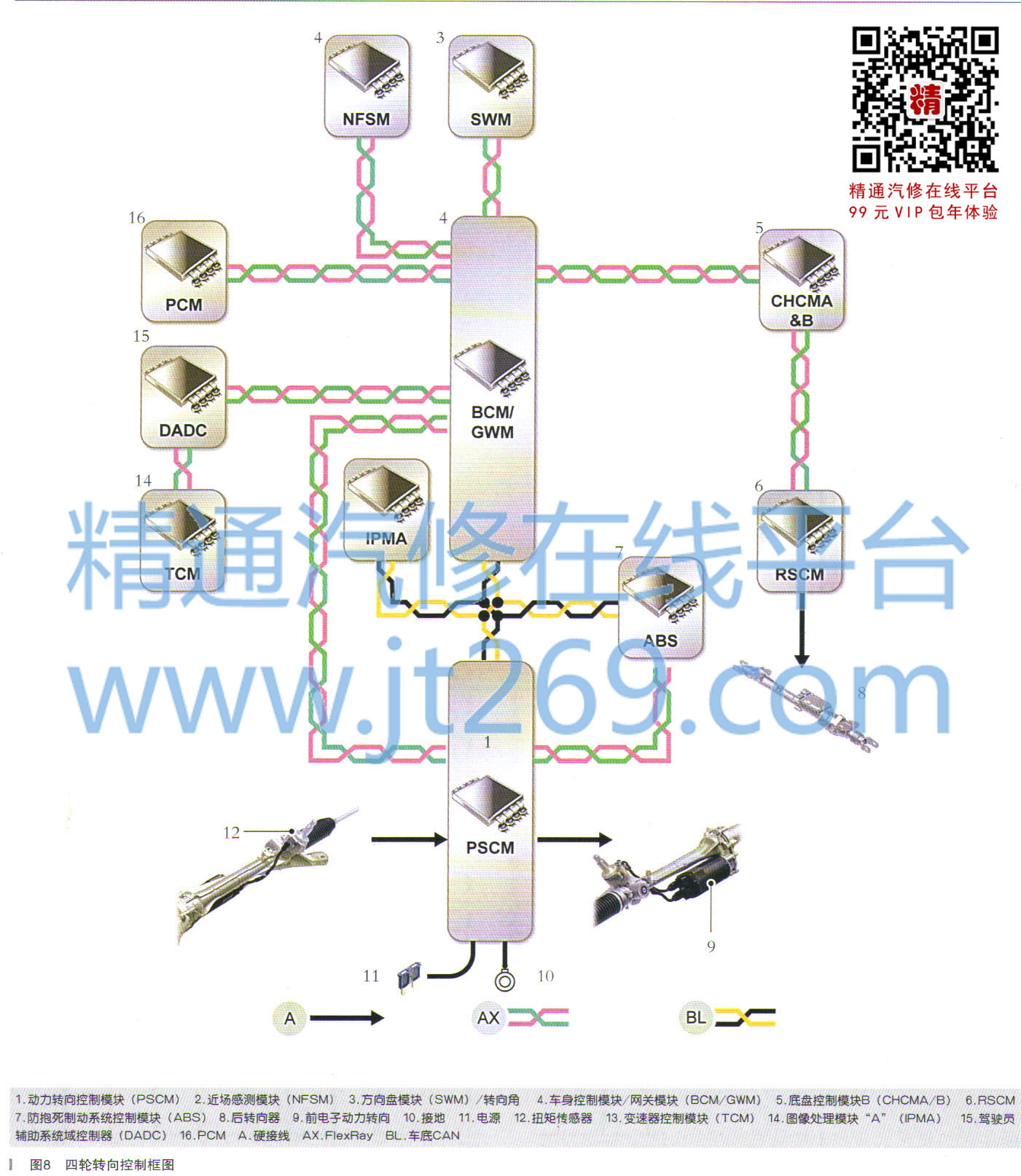
后转向由后转向器单元提供。后轮转向可改善车辆的转弯直径和可操纵性。后轮转向用于需要低速可操纵性和高速转向稳定性的情况。后轮转向控制框图如图8所示,由后轮转向控制模块(RSCM)使用车速、方向盘位置、相关的前轮角度和方向盘转动速率的输入控制后轮角度。驾驶域控制器(DADC)是四轮
转向系统的托管主控制器,该控制器计算需求角度并通过FlexRay总线将其发送至RSCM,然后由后转向器执行该操作。DADC使用来自
ABS的车轮转速信息和来自
转向角传感器( SASM)的方向盘输入以及其他输入(例如车辆模式)来计算执行器需求。RSCM测量其位置和状态,并反馈给DADC(该控制器进而将系统状态发送至其他模块,如信息显示系统Pivi和仪表)。
(1)当存在以下情况时将提供后转向车轮移动:
·从后接线盒(RJB)的60A保险丝激活点火线
·电源模式在FlexRay信号设置为电源模式7(发动机运转)。为获得100%标称后转向,电源电压必须在10.5-18V之间。如果电源电压超出这些限值,后转向将减少或停止
(2)托管在DADC上的后转向控制应用程序通过FlexRay和高速 (HS)车身底部CAN系统总线从以下项接收输入信号:
·来自SASM的转向角
·来自
ABS控制模块的车轮转速、车轮方向、车速、前转向偏移和自动纵向控制模式等信息
·来自PSCM的自动横向控制模式
·来自
BCM/GWM的车辆配置文件(CCF)(安装了RWS)、电源模式、工厂/运输模式和地形模式请求
·来自RSCM的后转向电机位置(测得的行程)和RSCM状态
今来自约束控制模块(RCM )的车辆状态(纵向/横向加速度等)信号
托管在DADC的后转向控制应用程序使用以上输入数据和软件算法控制后转向电机操作。
关键词:

")
")
")
")

