四、泊车辅助系统(PMA)
1.概述
泊车辅助系统(与驻车距离报警系统PDC连接的特种装备SA5DP)在驾驶员寻找车位以及在纵向狭窄车位驻车时向其提供帮助。这种辅助系统一方面在需要时通知驾驶员车位空隙是否足以驻车,另一方面通过独立的转向运动以最佳的角度将车辆引人车位。车位可以位于驾驶员侧也可以位于前乘客侧。驾驶员通过加速踏板拉杆和制动踏板杆控制车辆。同时驾驶员可以完全不用考虑转向任务,只需将注意力完全集中于周围环境,提前识别可能的危险情况。
2.部件简短描述
泊车辅助系统控制单元。PMA控制单元安装在后面板旁的行李箱槽中。泊车辅助系统与FlexRay总线系统相连。PMA控制单元含有一个用于FlexRay的终端电阻,如图13所示。
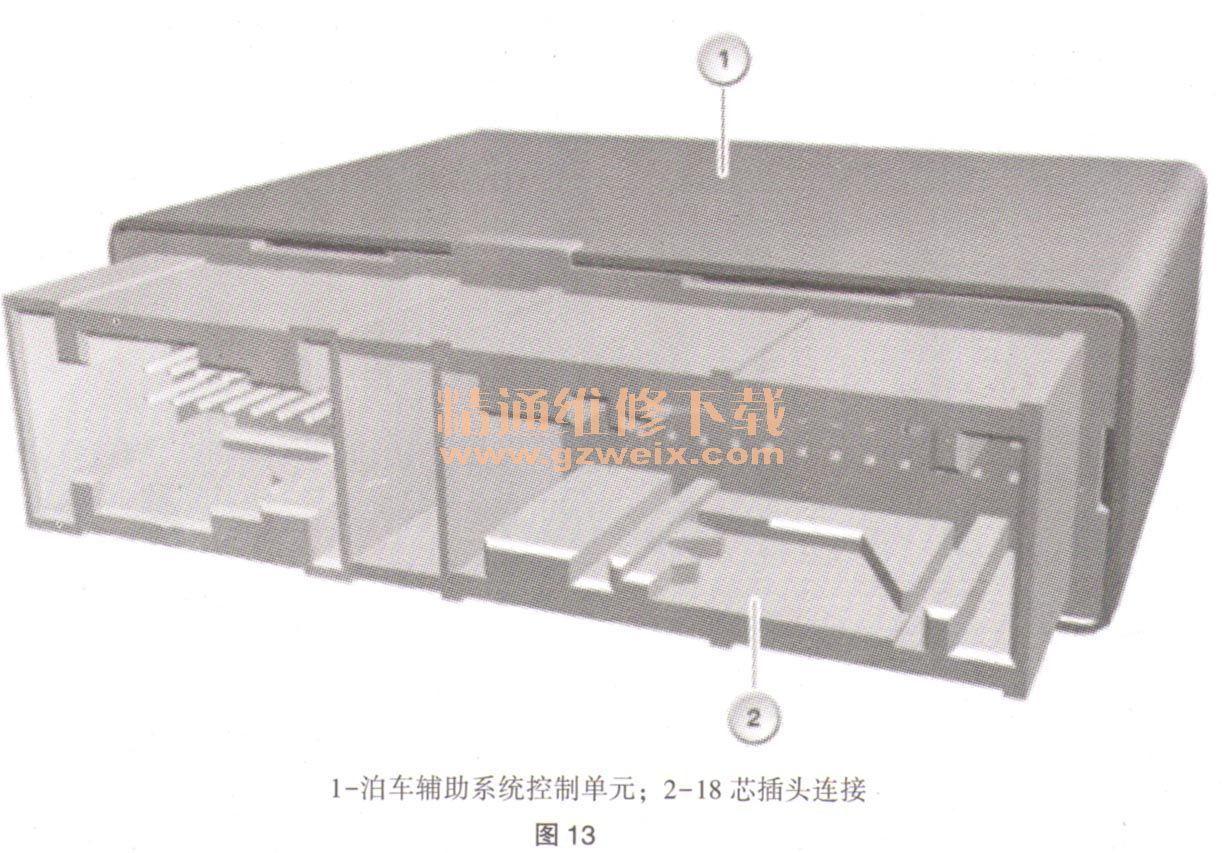
与超声波传感器的通信通过一根局域互联网总线完成。两个超声波传感器由PMA控制单元供电。
泊车辅助系统的超声波传感器。泊车辅助系统的两个超声波传感器安装于前侧围辅助转向灯旁边。两个超声波传感器的功能与驻车距离报警系统(PDC)的超声波传感器的功能类似:都是发出超声波脉冲然后再接收回声脉冲,然后由PMA控制单元分析信号,以此计算出车位的长度和深度,如图14所示。
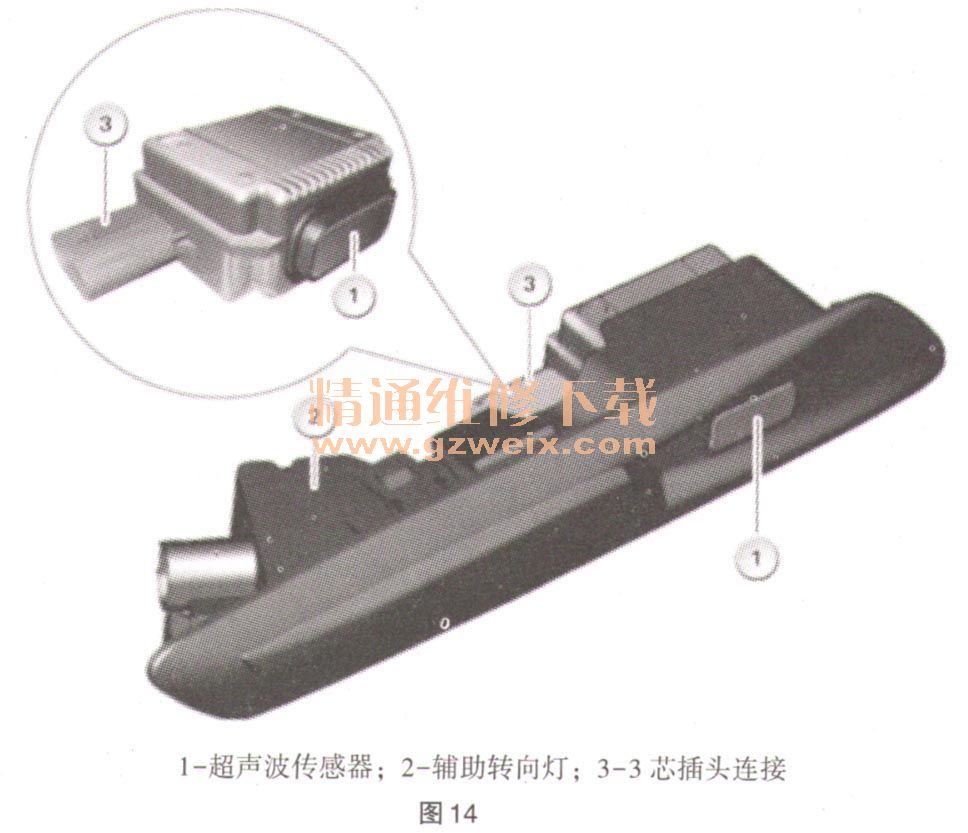
超声波传感器通过局域互联网总线与PMA控制单元相连。
3.功能联网
泊车辅助系统由PMA控制单元和2个测量车位的超声波传感器组成。由电动机械式助力
转向系统(
EPS)执行驻车控制单元计算出的转向运动。借助于泊车辅助系统的复杂功能,许多控制单元都可以通过总线系统交联,如图15所示。
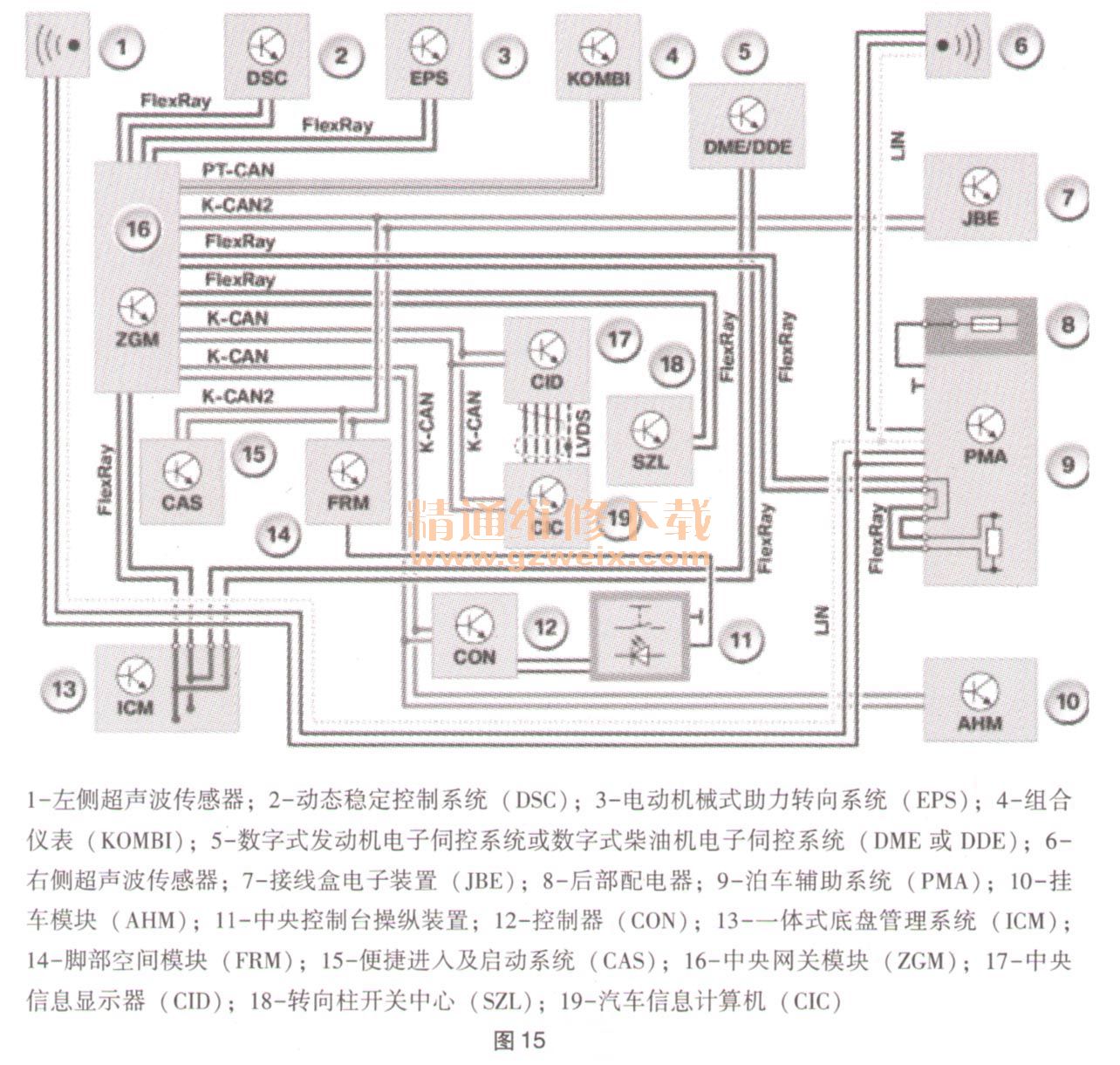
泊车辅助系统可以通过PDC按钮或挂人倒车挡激活。接下来的操作由控制器完成。系统借助驻车距离报警系统(PDC)的超声波传感器监控驾驶员的纵向引导。通过中央信息显示器(CID)向驾驶员显示驻车过程。
挂车行驶以及在急弯道行驶时无法使用泊车辅助功能。使用限制和显示方式请注意车主手册。
4.系统功能
行驶经过时(速度低于36km/h)自动测量车位。功能激活后,通过CID向驾驶员显示,车位是否合适。启动驻车过程后:通过CID提示驾驶员倒车、制动以及向前行驶。驻车过程可以通过一步或多步完成。
此驻车过程在下列情况下会被取消:最大驻车速度超过10km/h;闪光灯选择错误(例如本该是右边,却选成了左边);驻车过程有障碍物导致事故危险(即使是在对面);驾驶员干扰转向;任意车门打开;挡位选择错误;DSC识别到滑差。以上任意一个导致驻车取消的原因都会以一条信息记录在PMA控制单元的故障代码存储器中。原因并非系统故障,而是用户的误操作。取消后系统会检查,是否可以重新驻车。必要时驾驶员可以立即重新驻车。
5.售后服务提示
更换PMA控制单元或超声波传感器后无须试运行。但控制单元会在每期启动时检查,传感器的软件是否与控制单元软件兼容。如果不兼容,在PMA控制单元中会出现一个相应的故障代码。这种情况下必须执行服务功能更新超声波传感器的软件。PMA控制单元自行监控故障并在需要时记录相应的故障记录。特殊情况下无法记录。控制单元在下列情况下无法进行识别:超声波传感器(包括密封环)安装或放置错误时;或超声波传感器区域的侧围损坏时。这可能导致下列无故障记录的客户投诉:只能识别很少的小型车位;驻车后,车辆与前面的车非常贴近或距离很远;驻车后,车辆与路边石非常贴近或距离很远;车辆斜着停放在车位上。这种情况下必须正确安装超声波传感器并且检查超声波传感器区域的侧围是否损坏(参见故障症状)。
上一页 [1] [2] [3] [4] [5] 下一页
")
")
")
")

