初始点火提前角又称为固定点火提前角,其值大小取决于发动机的结构形式,并由
曲轴位置传感器的初始位置决定,一般为上止点前BTDC 6°~12°,如桑塔纳2000GLi型轿车为BTDC 8°。
在下列情况时,由于发动机转速变化大,空气流量不稳定,进气量传感器输出的流量信号就不稳定,点火提前角不能准确控制,因此采用固定的初始点火提前角进行控制,其实际点火提前角等于初始点火提前。发动机起动时;发动机转速低于400r/min时;检查初始点火提前角时。
基本点火提前角是发动机最主要的点火提前角,是设计微机控制点火系统时确定的点火提前角。由于发动机本身的结构复杂,影响点火的因素较多,理论推导基本点火提前角的数学模型比较困难。而且很难适应发动机的运行状态。因此,国内外普遍采用台架试验方法,利用发动机最佳运行状态下的实验数据来确定基本点火提前角,如图11所示。
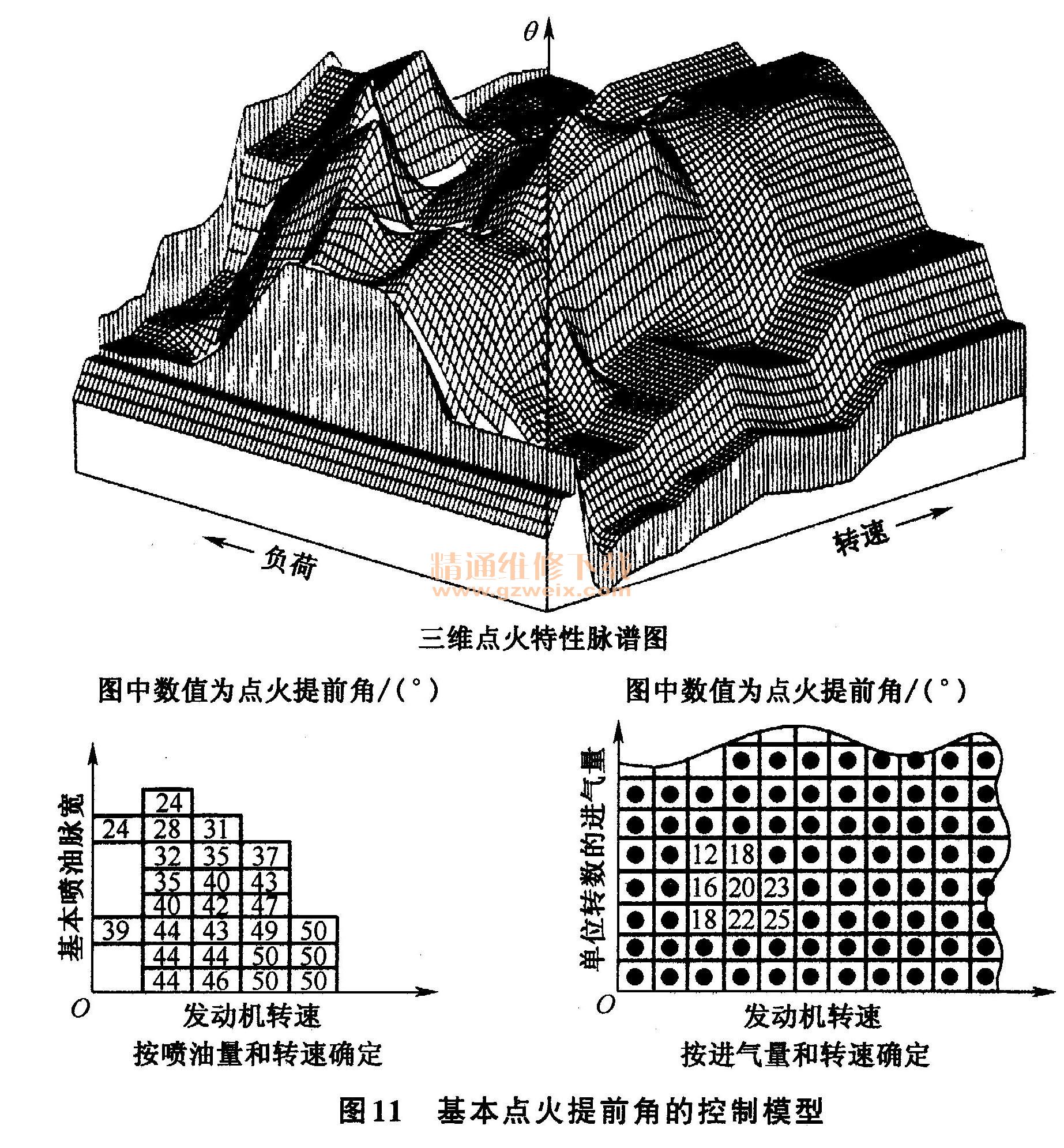
首先测试发动机转速与最佳点火提前角的特性,试验时节气门全开(排除真空度的影响),在每一转速下,逐渐增加点火提前角,直至得到最大功率为止,此时对应的点火提前角即为该转速下的最佳提前角。用同样方法测出不同转速下的最佳点火提前角,即可绘出一族转速与最佳点火提前角的特性曲线。然后测试发动机负荷(真空度)与点火提前角的特性,将发动机固定在某一转速,调节真空度大小,在每一真空度下将点火提前角逐渐增加,直到测得最大功率为上。改变发动机转速,用同样方法测出不同真空度下的最佳点火提前角,即可绘制一组发动机负荷与最佳点火提前角的特性曲线。
综合考虑发动机油耗、转矩。排放和爆燃等因素,对试验结果进行优化处理后,即可获得以转速和负荷为变量的三维点火特性脉谱图。将脉谱图以数据形式存储在
ECU的只读存储器ROM中,汽车行驶时,微机根据发动机转速信号和负荷信号(由空气流量和节气门位置传感器确定),即可从ROM中查询出相应的基本点火提前角来控制点火。
为使实际点火提前角适应发动机的运转状况,以便得到良好的动力性、经济性和排放性能,必须根据相关因素(冷却液温度、进气温度、开关信号等)适当增大或减小点火提前角,即对点火提前角进行必要的修正。修正点火提前角的项目有多有少,主要有暖机修正和怠速修正。
暖机修正是指节气门位置传感器(TPS)的怠速触点IDL闭合、发动机冷却水温度变化时,对点火提前角进行的修正。当冷却水温度低时,应当增大点火提前角,以促使发动机尽快暖机;当冷却水温度升高后,点火提前应相应减小。
怠速修正是为了保证怠速运转稳定而对点火提前角进行的修正。发动机怠速运转时,由于负荷变化
ECU会将怠速转速调整到设定的目标转速。如动力转向开关或空调开关接通,发动机实际转速低于规定的目标转速时,
ECU将根据转速之差,相应地减小点火提前角,使怠速运转平稳,防止发动机怠速熄火。
发动机的实际点火提前角是上述三个点火提前角之和。发动机每转一转,
ECU计算处理后就输出一个提前角信号。因此,当传感器检测到发动机转速、负荷、水温发生变化时,
ECU就会自动调整点火提前角。当
ECU确定的点火提前角超过允许的最大提前角或小于允许的最小提前角时,发动机很难正常运转,此时
ECU将以最大或最小点火提前角允许值进行控制。
(3)微机控制点火系统的控制过程。微机控制点火过程可分为
点火提前角控制和点火导通角控制两种过程。为了说明微机控制点火系统的工作过程,下面以桑塔纳2000GSi、3000型轿车四缸发动机点火控制过程为例说明。设发动机判缸信号在第1缸压缩上止点前BTDC 88°时产生、曲轴转速2000r/min时最佳点火提前角为上止点前BTDC 30°曲轴转角,控制过程如图12所示。
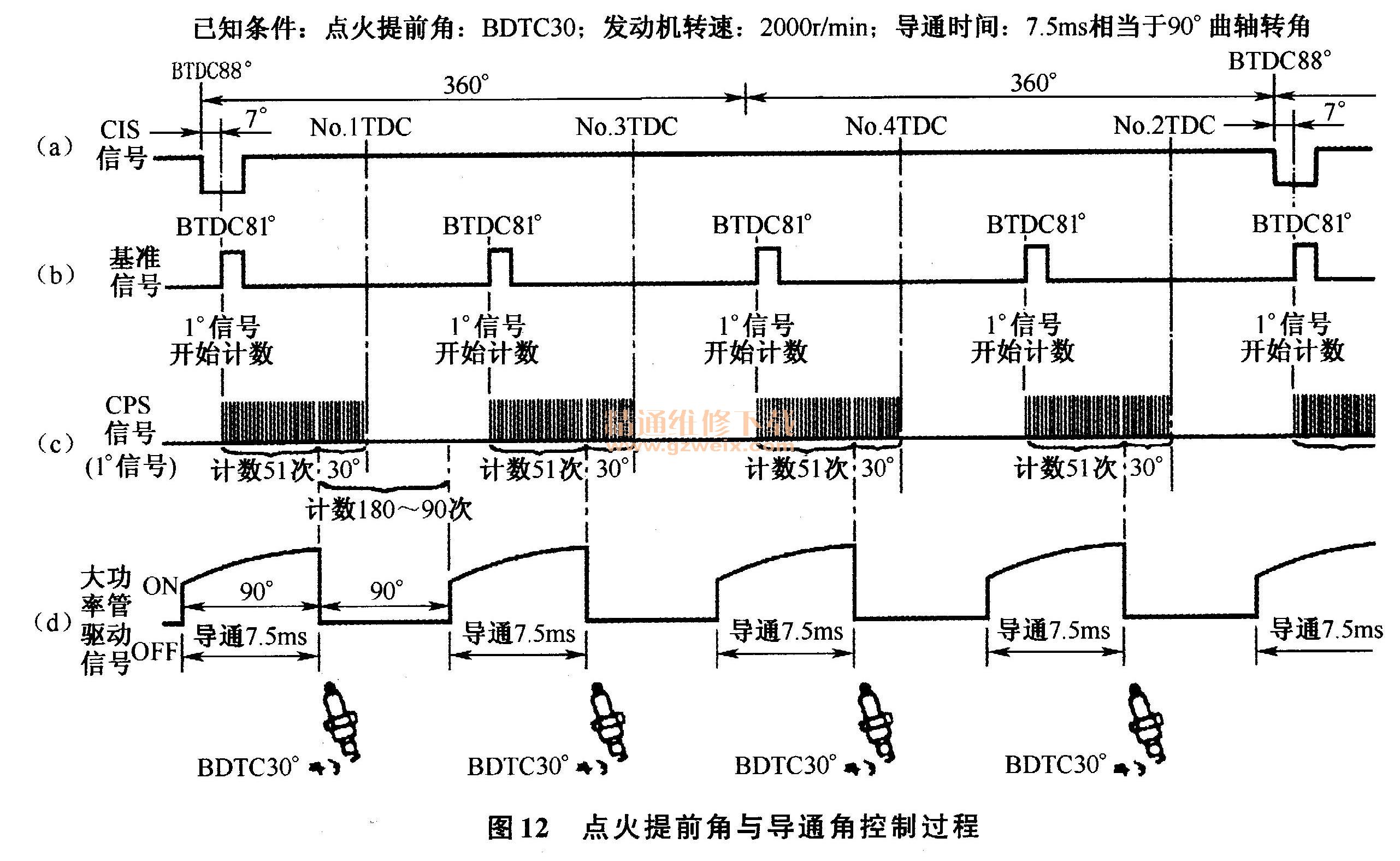
① 火提前角的控制。由凸轮轴位置传感器和曲轴位置传感器结构原理可知,凸轮轴位置传感器产生的判缸信号下降沿输入ECU时,表明第1缸活塞处于压缩上止点前BTDC 88°位置,如图12a所示。当ECU接收到判缸信号下降沿后,将对曲轴位置传感器CPS输入的转速与转角信号进行计数。
计数开始时的信号称为基准信号,由ECU内部电路控制,曲轴每旋转180°产生一个基准信号。因为曲轴位置传感器第一个凸齿信号在判缸信号下降沿后7“时产生,所以基准信号对应于第1缸活塞压缩上止点前BTDC 81°位置,如图12b所示。
上一页 [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] 下一页





