・上一文章:本田雅阁CR2发动机防启动系统灯间隙性闪烁故障检修
・下一文章:汽车车载时钟的设计与研究
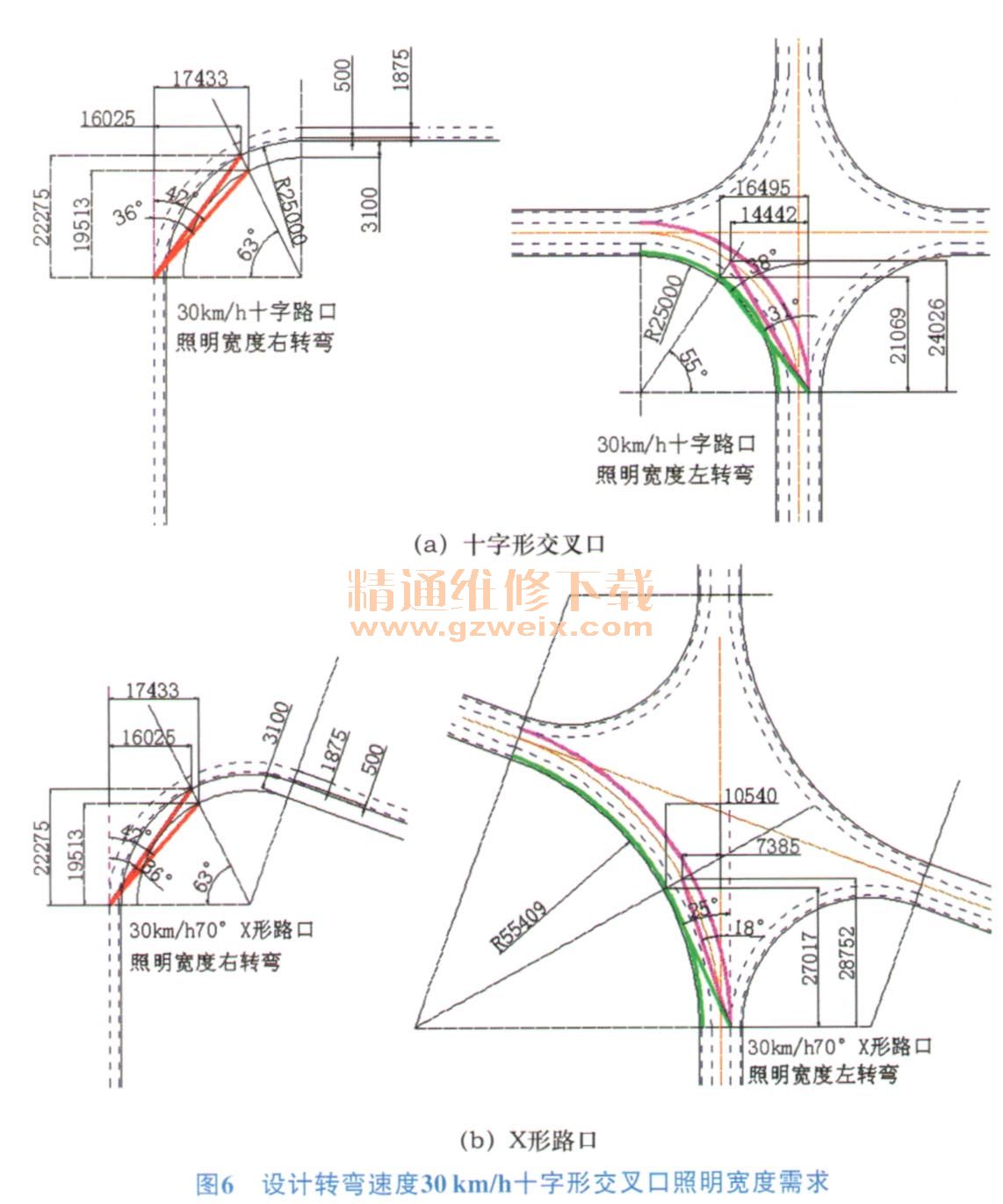
根据表2、表6和图2构建的十字路口模型,选取30 km/h和20 km/h转弯速度进行研究。十字路口照明距离需求计算过-K如不:c1)弧长C=停车视距;②通过公式:圆心角A=FT1,求圆心角A;③通过圆心角A,考虑行人速度,确定弦长L的终点;④依据。角和弦长L计算在行驶方向上,各设计速度下,车辆在弯道行驶所需的单侧照明宽度。设计转弯速度30 km/h十字路口照明距离需求如图6所示,20 km/h数据略。
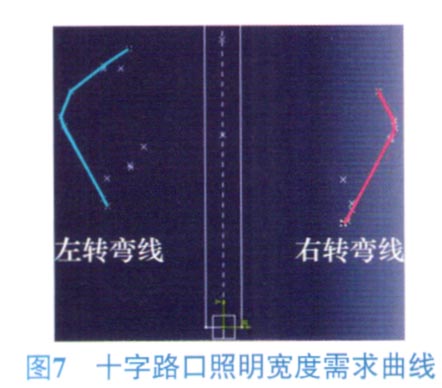
将数据在路面铺点并用线形连接,可得:在十字路口相应距离和车速下,及时制动或加速通过时所需的31x照明距离和宽度,如图7所示。
3.5坡道
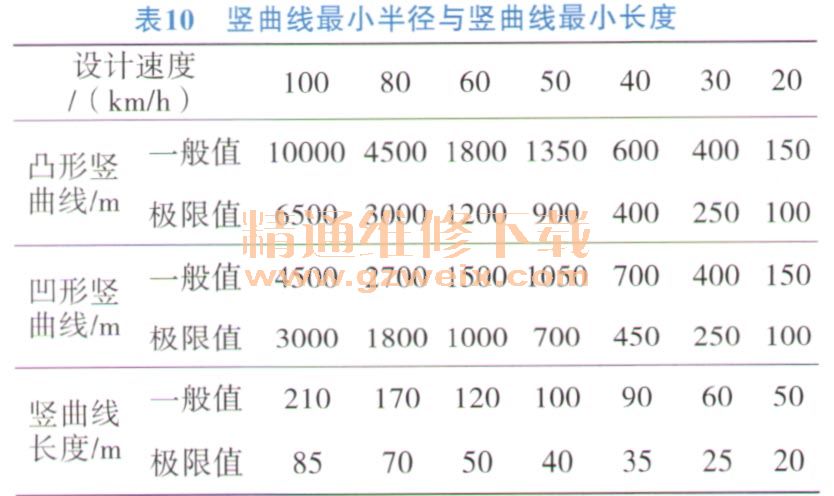
各级道路纵坡变化处应设置竖曲线,竖曲线宜采用圆曲线,竖曲线最小半径与竖曲线最小长度应符合表10所示。由图8可知,当角a1与a2为极限值时道路倾角最大,当弧长L为极限值时竖曲线半径最小,故针对极限情况进行研究。
1)凹形坡道
凹形坡道灯光上扬角度计算过程如下:通过公式a =180L/πr,求得各安装高度下的灯光相对路面上扬角度a,其中,L为竖曲线弧长,厂为竖曲线半径。
对比直行道路停车视距灯光偏角与凹形坡灯光角度变化可知,仅凭借固定位置的近光不能满足坡道安全视距要求,需配合近光高度调节装置、降速行驶或使用远光等辅助手段满足安全视距要求,故本文不再继续研究。
2)凸形坡道
凸形坡道情况下(一般值和极限值),灯光无法照射到相应安全视距(数据略),在凸形坡道时应降速行驶,故本文不再继续研究。
3.6特殊路况一一近光近场
由于中国城市道路情况的特殊性,在近光近场区域(30m前)需要较大的宽度以保证行人较多路况的行驶安全,故高配车型近光需尽最大可能满足人眼30°视场照明范围,即在前方20~30 m区域应采用十字路口转弯照明需求线或视场线的较大值,如图9所示。
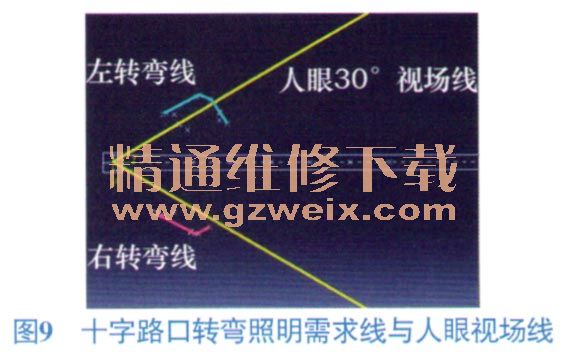
人眼30°视场在20m和30m处单边宽度分别为7.28 m和17.32 m,分别可满足识别1 m/s和4 m/s速度行人识别需求。人眼视场线与十字路口转弯照明需求线相比较,在车前10~25m范围内十字路口转弯照明需求线更宽,故选取该线作为照明需求线。





