・上一文章:剖析奔驰GLC汽车新技术(二)
・下一文章:大众新朗逸轿车行驶中偶尔严重抖动
一、概述
自适应动态系统是一种电子控制的悬挂系统,它根据现有驾驶条件持续不断地调节悬挂减震器的减震特性。该系统由ADM进行控制。ADM接收来自3个车身垂直加速计、4个悬挂高度传感器和来白其他车辆系统的信号,以确定车辆状态、车身和车轮移行状态以及驾驶者操作输入。ADM使用这些信号持续不断地将各减震器的减震特性控制在适当的水平,从而实现最佳车身控制和车辆驾乘舒适度。ADM还包括电子差速器控制器(如已安装)。
二、系统操作和部件说明
(一)控制图表(如图1所示)
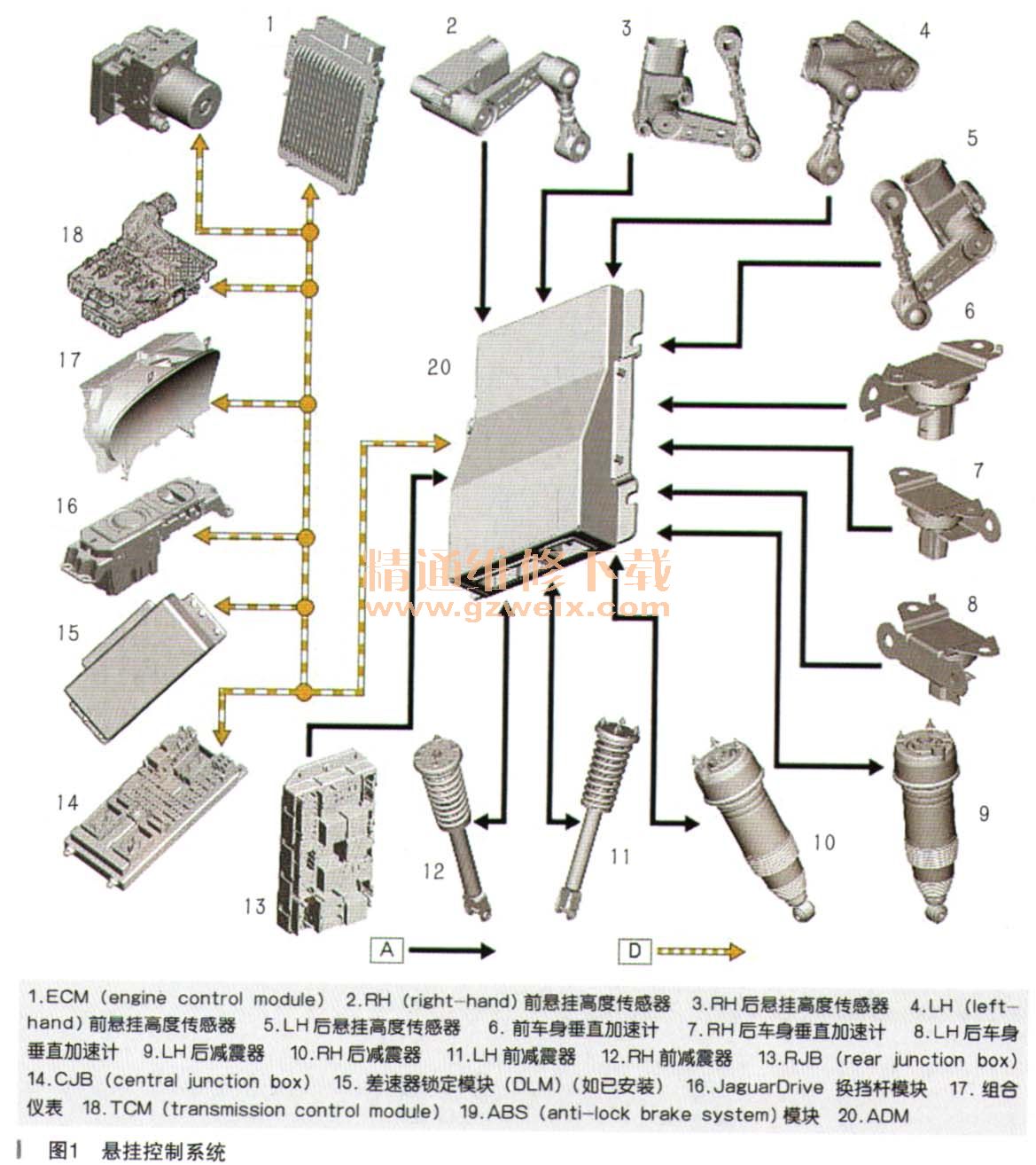
注意:A=硬接线;D=高速CAN(controller area network)总线。
(二)系统操作
1. 工作原理
ADM综合利用来自其他系统模块的信息以及来自车身垂直加速计和悬挂高度传感器的数据,测定车辆和悬挂的状态及驾驶者输入。通过该信息,ADM应用算法控制减震器,以适合当前的驾驶状况。ADM通过高速CAN总线从所述的系统7创牛接收以下信号:
·制动压力-ABS模块
·制动压力品质因数-ABS模块
·车辆配置参数-CJB
·发动机转速-ECM
·发动机车苟逮品质因数-ECM
·发动机飞轮扭矩实测值-ECM
·发动机飞轮扭矩实测值品质因数-ECM
·挡位FA标-TCM
·横向加速度-ABS模块
·电源模式(点火信号)-CJB
·电源模式品质因数-CJB
·侧倾稳定性控制模式-ABS模块
·转向盘角度-ABS模块
·转向盘角速度-ABS模块
·转向盘角度状态-ABS模块
·请求的地形模式-JaguarDrive换挡选择器
·变矩器滑转-TCM
·车辆信息参数HS-CJB
·车速-ABS模块
·车辆速度品质因数-ABS模块
·左前轮转速-ABS模块。
·左前轮转速品质因数-ABS模块
·右前轮转速-ABS模块
·右前轮转速品质因数-ABS模块
·左后轮转速-ABS模块
·左后轮转速品质因数-ABS模块
·右后轮转速-ABS模块
·右后轮转速品质因数-ABS模块
ADM也通过高速CAN总线输出信息,供以下其他系统使用:
·故障信息-组合仪表
·地形模式变更状态-JaguarDrive换挡杆。
·地形模式-JaguarDrive换挡杆
·左前悬挂高度-其他系统(根据需要)
·右前悬挂高度-其他系统(根据需要)
·左后悬挂高度-其他系统(根据需要)
·右后悬挂高度一其他系统(根据需要)
")
")
")
")

