・上一文章:电能量采集系统 深化应用的设想
・下一文章:剖析2016年玛萨拉蒂Levante新技术(五)
四、电气系统
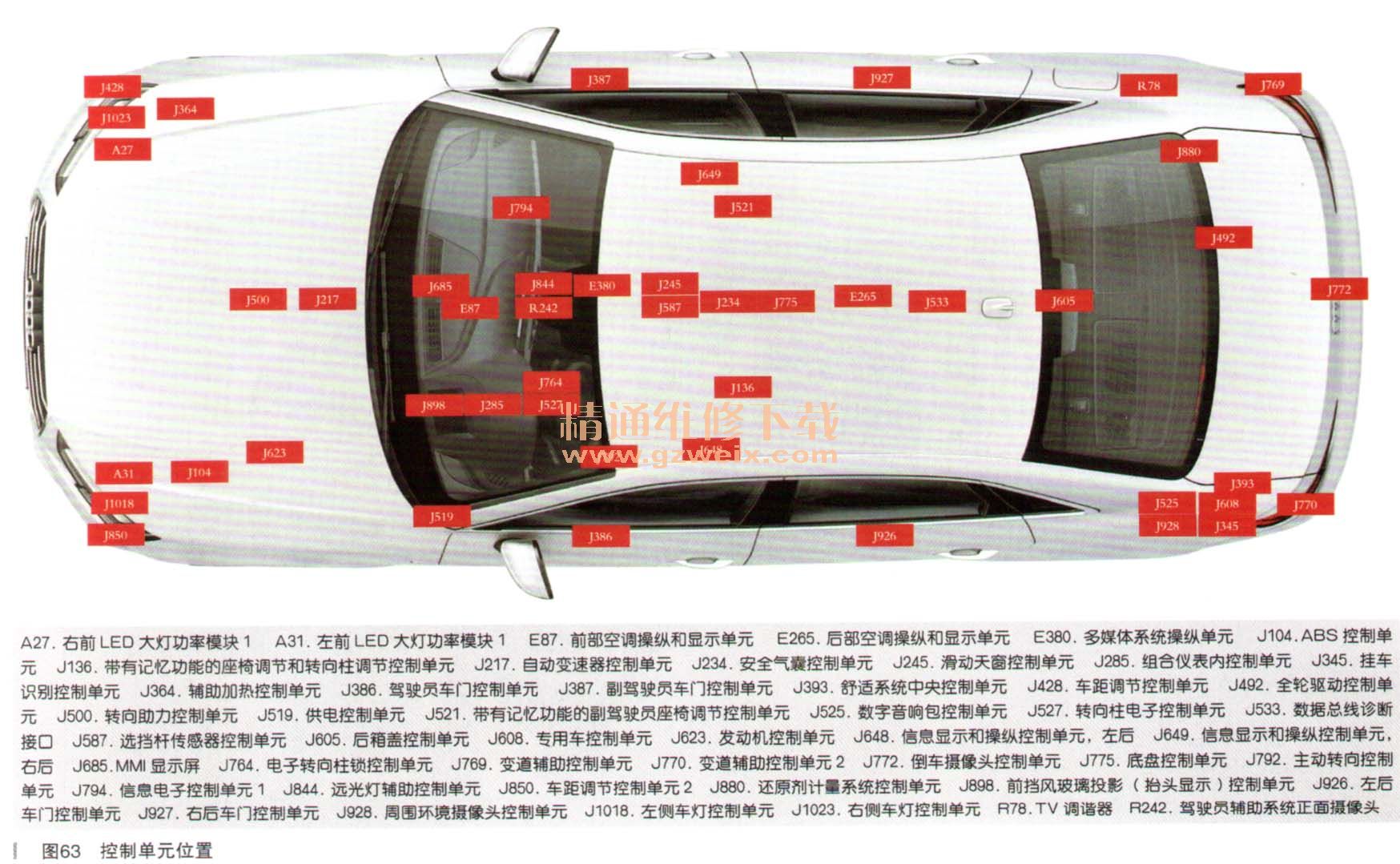
(一)拧制单元的安装位置
控制单.元如图63所示,有几个控制单元是选装的或者在某些特定市场才有。为了清楚起见,并未把车上的所有控制单元都展示出来:
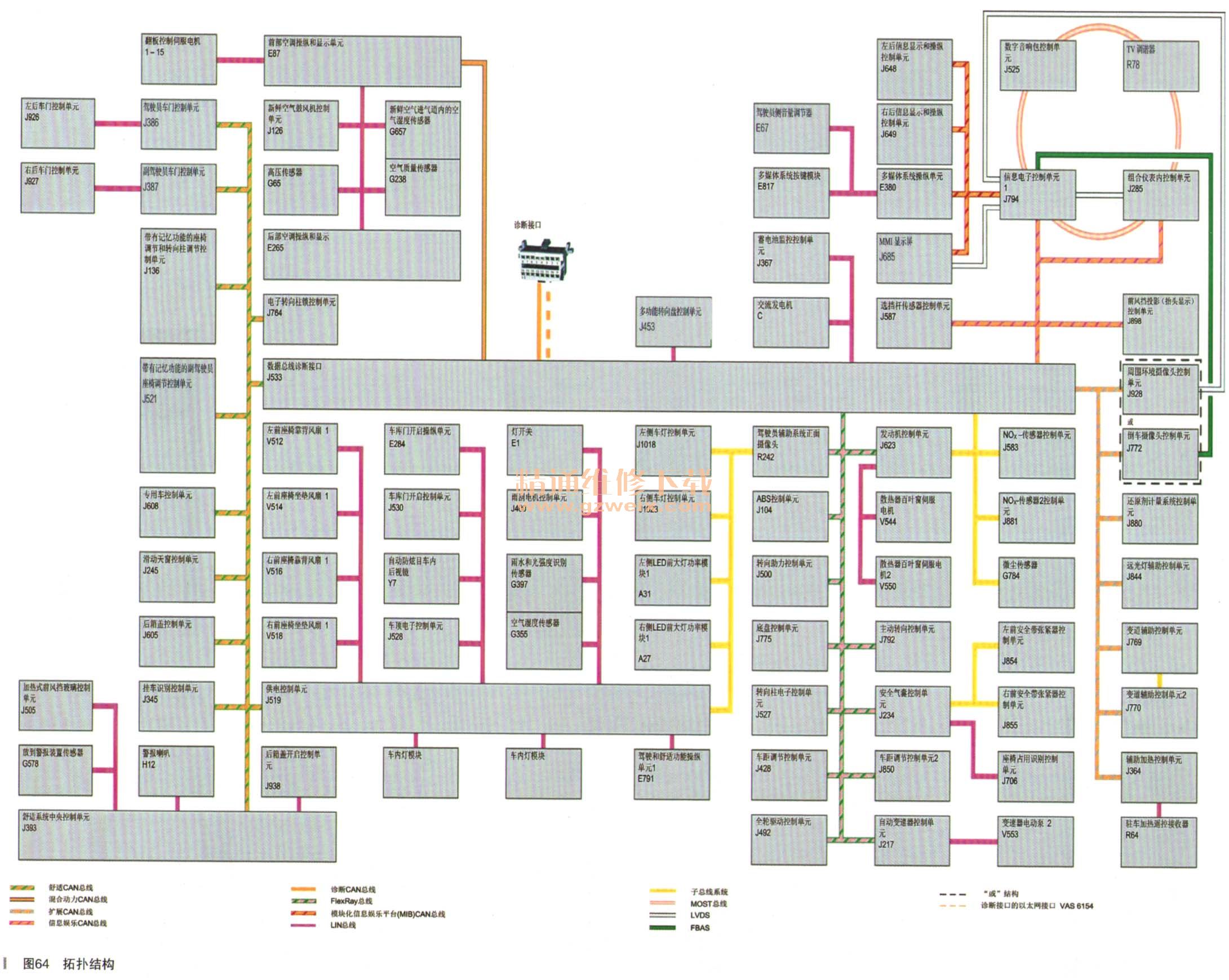
(二)拓扑结构
该拓扑结构图展示了能连接在总线上的所有控制单元,如图64所示。
(三)周围环境摄像头
1功能
周围环境摄像头,是驾驶员辅助系统的一种,该装置可以在调车和泊车入位过程中为驾驶员提供帮助二对车辆附近的环境情况看得清楚的话,可以帮助驾驶员识别处于正常视野之外的障碍物或者危险情况,就是说该系统可以避免发生碰撞。
周围环境摄像头包含4个广角摄像头,这些摄像头可以侦测绕车一周的环境情况。这4个摄像头安装在散热器格栅、后箱盖拉手和两个车外后视镜内。
驾驶员可以选择六种不同的视图:车辆俯视图和每个摄像头的视图。
2.可选视图
周围环境摄像头的视图总是以分屏形式显示。所选的视图在MMI显示屏的左侧显示出来,大概需要整个显不区的三分之二。右侧则显示一幅条幅状(就是高度大于宽度那种的)图像,该图显示的或者是可视驻车系统的图像,或者是周围环境摄像头的俯视环境图。
如果左侧显示区已经显示出俯视环境图,那么可视驻车系统的图像就显示在右侧区。
六种视图可供用户使用。
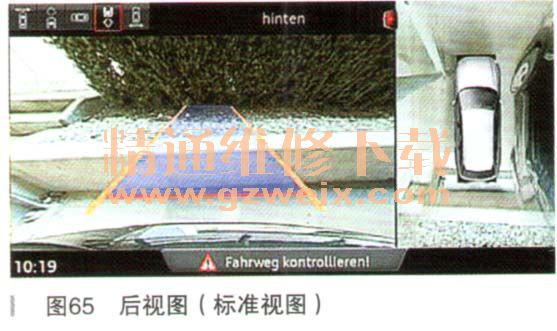
(1)后视图(标准视图)
该视图显不的是车后部的环境情况,如图65所小。此视图只是使用了后部摄像头的图像。橙色的线表示的是预测的继续倒车时车辆要走的路径轨迹,该轨迹取决于当前的转向角,用于在倒车和泊车入位时为驾驶员提供帮助。当图上的红线接触到障碍物时,就不要再继续倒车行驶了,因为有碰撞的危险了。
")
")
")
")

