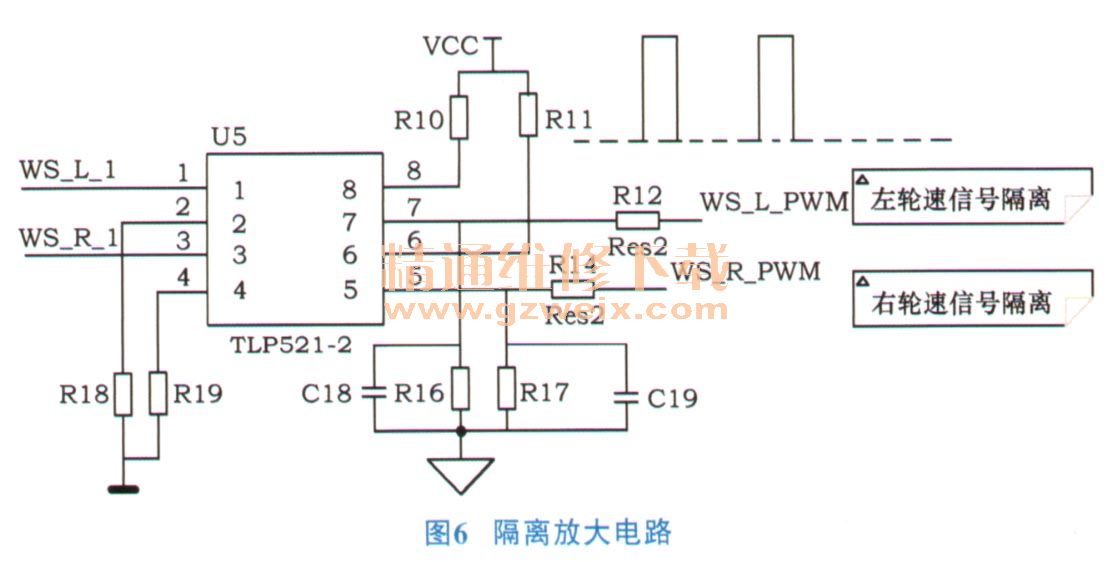
由于芯片的工作电压为5V,虽然通过电压比较电路已经将轮速脉冲的电压幅值拉高到了2.5V,但仍无法满足芯片的采样需求,因此需要将方形的幅值再放大一倍。利用光电祸合器隔离放大电路,如图6所示,先隔离左右轮的输入、输出轮速脉冲信号,实现信号单向传输的同时还避免了输出信号对原始信号的影响闭,然后利用电阻分压,放大轮速脉冲信号的输出幅值,供芯片采样。
2.3转向控制模块电路设计
本控制器主要基于原车
EPS进行转向控制,但对于自动转向所需的转角、转矩信号需由泊车控制器的转向控制模块输出至原车
EPS控制器,
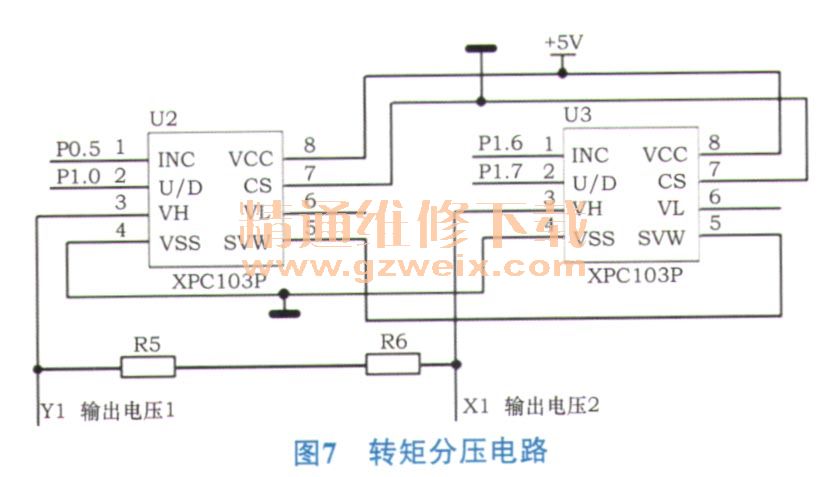
EPS根据控制信号控制电机工作,由此实现泊车控制器对转向的控制。图7为转向控制模块的电路原理,通过利用数字电位器构成分压电路,选用合适的串联电阻保证输出的电压在合理范围内变动,从而实现
EPS根据泊车控制器需求的转矩值实时变化与之对应的转矩电压。
2.4电源模块电路设计
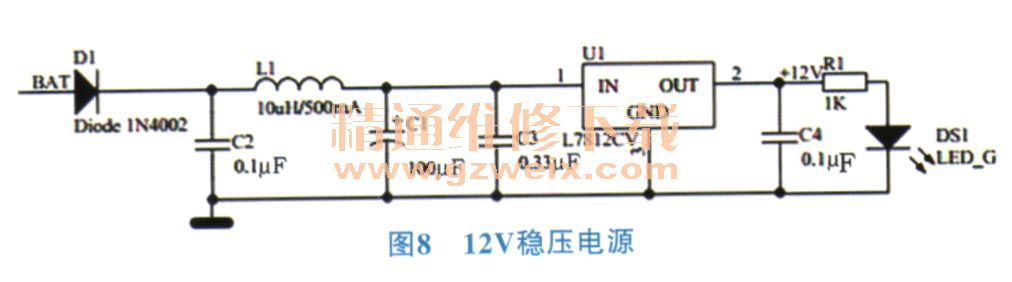
电源模块是整个泊车控制器最关键的部分,供电电压是否稳定,决定泊车控制器能否正常工作。由于车辆在起动和停止状态下
蓄电池电压会发生波动,因此,为了保证控制器和超声波雷达传感器能稳定工作,基于L7812稳压器设计稳压电路,如图8所示,通过电容滤波使输出电压稳定均匀。
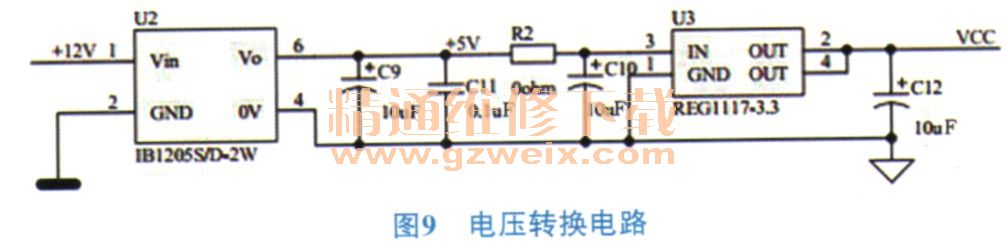
由于芯片的工作电压为5V,而上述稳压电路输出电压为12V,因此需要将12V电压转换为5V电压。利用集成电源模块设计电压转换电路,将稳压电路的12V输出电压接入集成电源模块的输入端,经过电容滤波即可得到5V的稳定输出电压,电路原理如图9所示。
3 总结
本文基于英飞凌的XC866芯片设计了自动泊车控制器硬件系统架构,详细分析了泊车控制模块所需要的控制信号,针对功能需求具体讲述了泊车控制模块、测距模块、轮速采集模块、转向控制模块和电源模块的硬件电路设计原理,从硬件开发的角度为自动泊车功能的实现打下了坚实的基础。该控制器目前处于试验论证阶段。
上一页 [1] [2]





