・上一文章:延长TAD720VE型柴油机燃油泵胶带使用寿命的方案
・下一文章:自走式喷杆喷雾机正确使用与简单故障排除
1.改进原因
随着水平定向钻机自动化程度的提高,其自动装卸钻杆装置已开始应用。某型号水平定向钻机配备的XZ200型自动装卸钻杆装置的伸缩臂主要由夹持装置、伸缩缸及其他附属结构件组成,如图1所示。

在水平定向钻机施工过程中,自动装卸钻杆装置在拆卸、夹送钻杆时,若机手对仲缩臂伸缩、钻机动力头前推及后拉动作操纵不当,可造成伸缩臂与动力头发生撞击,严重时可导致机械事故。伸缩臂与动力头撞击情形如图2所示。

2.改进方法
为解决仲缩臂与动力头运动过程中相互撞击问题,需要对伸缩臂及动力头防撞功能进行改进。经研究,我们决定为该水平定向钻机增设自动防撞系统。
(1)结构
该自动防撞系统主要由电源(vcc)、伸缩臂伸出感应传感器S1、动力头位置感应传感器S2、伸缩臂控制开关S3、功力头前推限制继电器K4、伸缩臂仲出停止继电器K6、动力头前推限制电磁阀、伸缩臂伸出限制电磁阀组成,如图3所示。
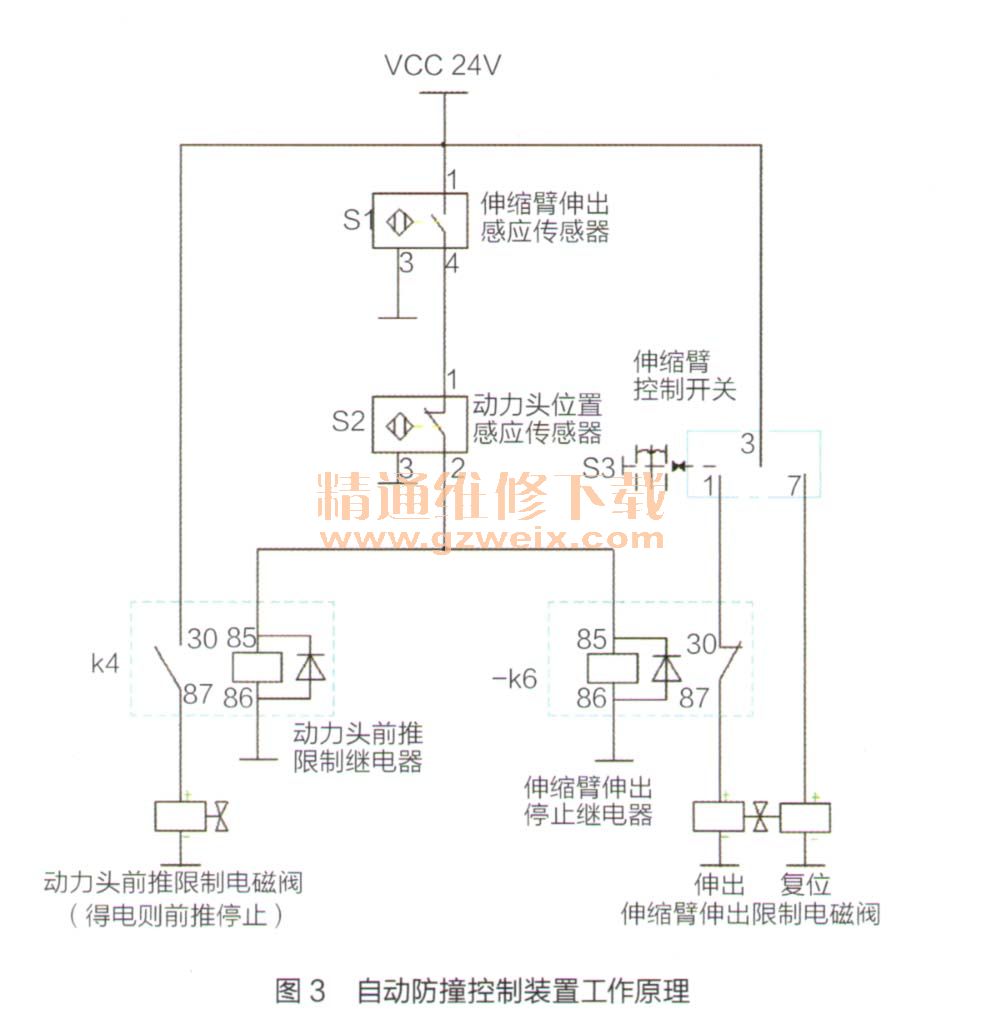
(2)工作原理
伸缩臂伸出感应传感器s1为常开式接近传感器,安装于仲缩臂伸出的安全距离处,用于感应伸缩竹的伸出状态。当伸缩臂伸出到该传感器感应端上方时,该传感器开关闭合,常闭式伸缩臂伸出停止继电器K6得电、其触点断开,伸缩臂电磁阀失电,伸缩臂停止伸出。
动力头位置感应传感器S2为常闭式接近传感器,安装于钻架一侧,用于感应动力头位置:当动力头运行到该传感器感应端上方时,该传感器升关断开,常开式动力头前推限制继电器K4失电、其触点闭合,动力头前推限制电磁阀得电,动力头停止前推。
在伸缩臂伸出状态下,动力头常闭式动力头位置感应传感器S2就会感应到范围内移动,当动力头离开常闭式动力位置感应传感器S2感应范围时,动力头前推限制电磁阀发挥限制作用,避免动力头继续前推与伸缩臂相撞。
在伸缩臂尚未伸出、动力头移动出常闭式动力头位置感应传感器S2感应范围时,常开式伸缩臂伸出感应传感器s1就会感应到伸缩竹伸出状态,控制伸缩臂伸出停止继电器K6的通电和断电,继而阻止伸缩臂继续伸出,避免其与动力头相撞。伸缩臂伸出感应传感器S1及动力头位置感应传感器S2的安装位置如图4所示。

3.改进效果
现场调试与施工跟踪结果表明,该水平定向钻机自动防撞系统可自动触发相关液压、电气控制元件,实现了仲缩臂与动力头的自动防撞功能,有效保护了该钻机的施工安全。该成果已成功中请专利保护,专利号为ZL201520065571.3。





