・上一文章:北京现代新胜达开大灯时加速无力
・下一文章:丰田新汉兰达驻车指示灯闪烁
一辆行驶里程约3.6万km,配置2.5L发动机、自动变速器的2013款奥迪A6L轿车。用户反映:该车辆行驶过程中多个故障灯点亮,重新启动后车辆恢复正常。行驶一段时问后车辆仪表再次亮起多个故障灯。
故障诊断:客户来店时车辆没有熄火,查看仪表:胎压灯亮、ABS灯亮、排放灯亮、变速器灯报警、手制动灯亮。熄火后重新启动车辆,所有故障灯均不亮。试车50km后车辆故障灯也不亮
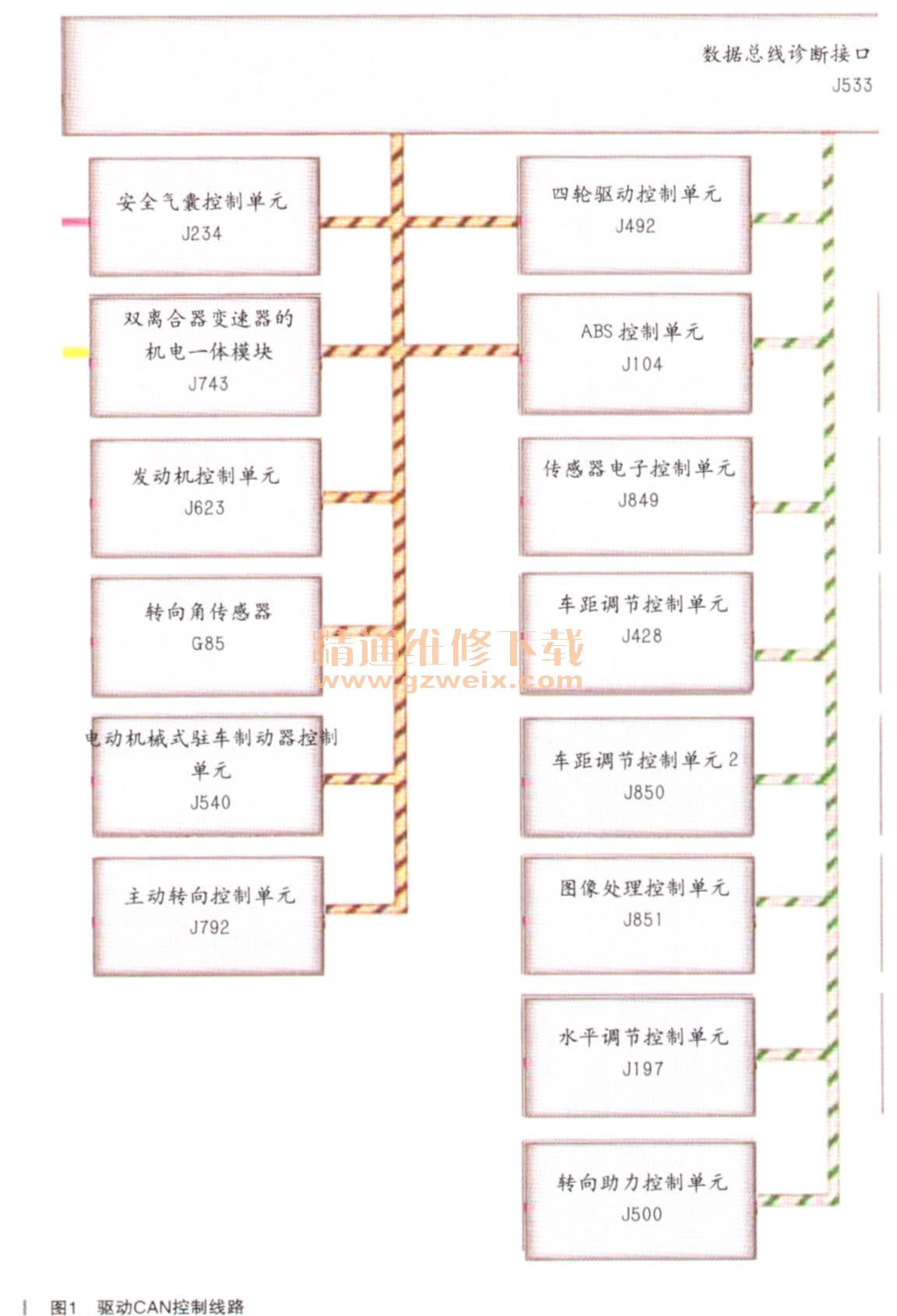
连接故障诊断仪检测车辆故障码为驱动CAN故障,发动机控制单元无通信偶发,变速器控制单元无通信偶发,手制动控制单元无通信偶发,ABS无通信偶发。多个控制单元有故障码,由于信息缺失而造成功能受限。驱动CAN相关线路简图如图1所示。
由以上故障码分析可能的故障原因有以下几个方面:
(1)网关控制单元供电和线路不正常;
(2)网关控制单元内部故障;
(3)网关到驱动CAN的相关CAN线路故障;
(4)各个驱动CAN上的控制单元其中一个内部故障;
(5)其他。
由于现代汽车的技术水平大幅提高,要求能对更多的汽车运行参数进行控制,因而汽车控制器的数量在不断的上升,从开始的几个发展到几十个以至少上百个控制单元。控制单元数量的增加,使得它们互相之间的信息交换也越来越密集。为此德国BOSCH公司开发了一种设计先进的解决方案----CAN数据总线,提供一种特殊的局域网来为汽车的控制器之间进行数据交换。
(1)CAN是Controller Area Network的缩写,称为控制单元的局域网,它是车用控制单元传输信沪急的一种传送形式。
(2)车上的布线空问有限,CAN系统的控制单元连接方式采用铜缆串行方式。由于控制器采用串行合用方式,因此不同控制器之间的信息传送方式是广播式传输。也就是说每个控制单元不指定接收者,把所有的信息都往外发送;由接收控制器自主选择是否需要接收这些信息。
(3)CAN-BUS系统组成
CAN收发器:安装在控制器内部,同时兼具接收和发送的功能,将控制器传来的数据化为电信号并将其送入数据传输线。
数据传输终端:是一个电阻,防止数据在线端被反射,以回声的形式返回,影响数据的传输。
数据传输线:双向数据线,由高低双绞线组成。
(4) CAN-BUS采用双绞线自身校验的结构,既可以防止电磁干扰对传输信息的影响,也可以防止本身对外界的干扰。系统中采用高低电平两根数据线,控制器输出的信号同时向两根通信线发送,高低电平互为镜像。并且每一个控制器都增加了终端电阻,以减少数据传送时的过调效应。
(5)CAN-BUS双绞线的基本颜色
CAN总线的基木颜色为橙色。CAN-LOW为棕色。CAN-High驱动系统为黑色,舒适系统为绿色,信息系统为紫色。
(6)由于汽车不同控制器对CAN总线的性能要求不同,因此最新版本的CAN总线系统人为设定为5个不同的区域,分别为驱动系统、舒适系统、信息系统、多功能仪表、诊断总线等5个局域网。其速率分别为(kbit/s):
·驱动系统(由15号线激活):500
·舒适系统(由30号线激活):100
·信息系统(由30号线激活):100
·诊断系统(由30号线激活):500
·仪表系统(由巧号线激活):100
检查各个节点和CAN插头,无异常情况出现。由于故障偶发性,无法捕捉到故障,初步检查没有发现其他故障,只发现J540外壳破损。询问客户得知,该车辆尾部出过事故,手制动控制单元外壳破损,当时维修人员没有给他换。针对以上情况,试着对换其他车辆J540后试车,没有试出故障。交予客户使用后观察情况,客户第二天再次来厂报修相同的故障,故障码和之前的一模一样。确句540无故障。那么该车到底什么间题引起多个控制单元不工作呢?由于相关的线路已检查,没有发现故障点,目前考虑会不会哪个控制单元工作不稳定,发热以后对驱动CAN有影响,从而引起所有的驱动CAN都不通信。
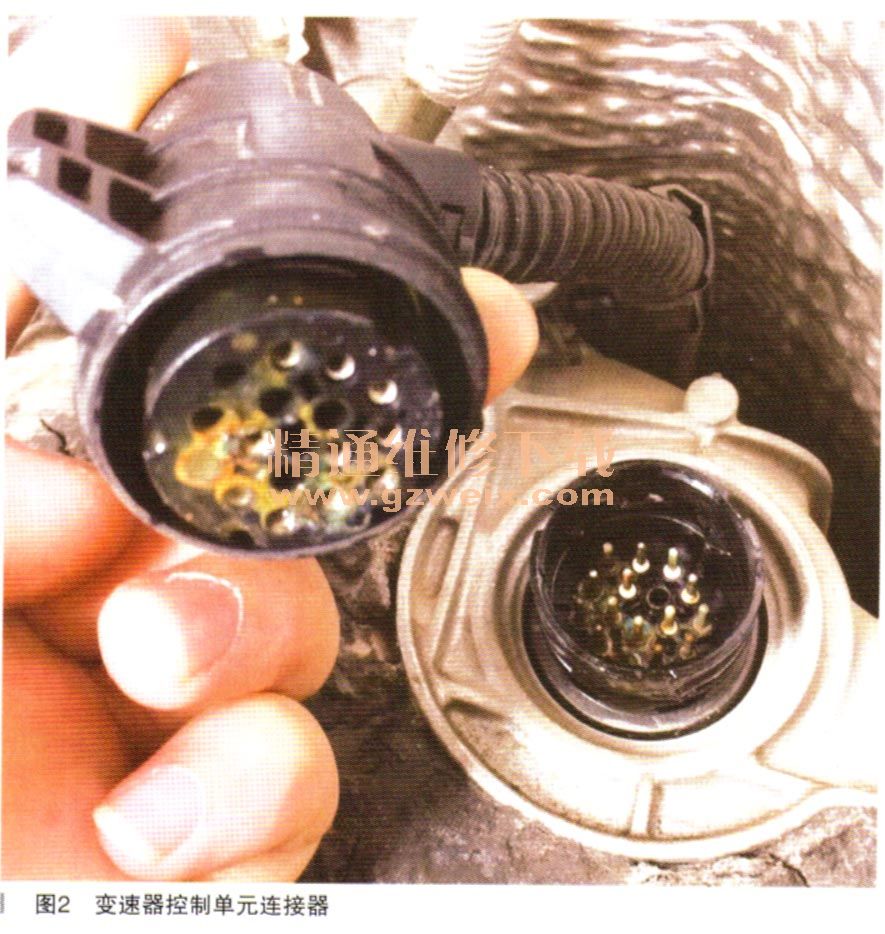
依次对换驱动CAN上的控制单元后试车,当拆卸变速器控制单元时,发现里面有水巨有锈蚀(如图2所示)。询问客户得知,前段时间曾涉水行驶,处理相关的线束后试车,故障排除,交予客户使用一个星期后回访,客户使用正常。
故障总结:对于偶发性故障只能根据故障现象和相关代码分析和排除故障,有时候也只能使用替换法来处理这种偶发故障。





