・上一文章:检修Canon(佳能)FAX-L770 型传真机,开机后,液晶显示器 LCD 无显示
・下一文章:检修丰田雷克萨斯发动机熄火故障
随着汽车电子控制技术的发展,在汽车上应用的电子设备越来越多,对于传统的、单一的、相互间少有联系的点对点通信方式是很难满足要求了,这就反过来促进了更灵活的电气系统的开发,CAN 网络就是其中的一项研究成果。CAN 即 ControllerArea Network(控制区域网络)。以前每一指令或信息都要求有一条单独的电线,而 CAN 网络允许在同一条电线上发送和接收大量不同的指令和信息,CAN 网络的使用已使得功能得到扩展而电线的数量不用增加。当然 CAN 技术的应用带来了很多的方便,同时也由此而引发了不少的疑难故障,本文介绍沃尔沃 XC90 轿车控制器局域网疑难故障的检修。
一、 沃尔沃 XC90 CAN 网络介绍
1. CAN 网络的高速侧和低速侧
CAN 网络由各种控制模块( 有时称为节点)组成,这些控制模块通过 2 条通信线相互串联连接。每个控制模块都有单独的电源和接地,并通过2 条通讯线接收信息/指令。CAN 网络中的控制模块数量会因车型、配置等级和结构而不同。
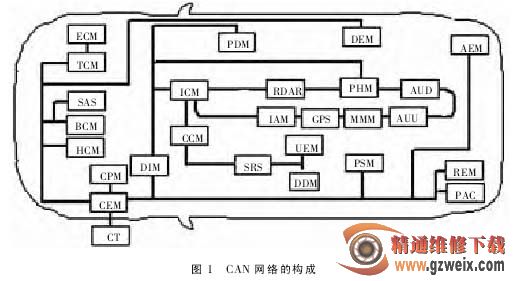
如图1所示,CAN网络由2部分组成。一部分是在中央电子模块(CEM)和发动机室内的控制模块(一般而言)之间传送信号/ 信息的高速部分(HS CAN),另一部分是在中央电子模块(CEM)和乘客室以及行李箱内的控制模块之间传送信号/ 信息的低速部分(LS CAN)。高速部分和低速部分由中央电子模块(CEM)串联连接,高速部分和低速部分之间的界面由中央电子模块 (CEM)提供,该模块可加快或减慢网络中这 2个部分之间的通讯。
2.CAN 网络传输电线、传输速度
1)CAN 网络传输电线
CAN 网络使用 2 条传输电线CAN-H 和 CAN-L,CAN-H 和 CAN-L 是用于在多路通讯网络中传送讯号的导线名称。勿将 CAN-H 和CAN-L 导线与表示 CAN 网络速度的 HS CAN 和 LS CAN 混淆。通讯是通过 2 条导线进行的。这 2 条导线为合股铜制导线。
2)CAN 网络传输速度
CAN 网络具有 2 种传送速度:HS CAN(高速)的传送速率为 500千位/ 秒,HS CAN(低速)的传送速率为125 千位/秒;其中 1 千位/秒=每秒1024 位(1 字节 = 8 位)。
对于控制模块和从属控制模块之间的串联通讯(Volcano Lite),传送速率为 10.4 千位/ 秒。还有一个叫做LIN 的串联标准。这是一个越来越普遍使用的国际标准。其功能几乎与 Volcano Lite 相同。只是通讯的方式和速率不同。LIN 的传送速率为9.6 千位/ 秒。
3.终端电阻器
为防止 CAN 网络中的电子反射和干扰,在高速部分和低速部分的每一端各有一个终端电阻器来桥接CAN-H 和 CAN-L 。每个终端电阻器的电阻值为120Ω。对于 HS CAN(高速),终端电阻器位于制动控制模块(BCM)和发动机控制模块(ECM)内。对于 LS CAN(低速),终端电阻器位于上电子控制模块(UEM)和后电子控制模块(REM)内。2 个终端电阻器并联连接。在特定条件下可对以下电阻器进行测量:在CAN 网络完整时,网络上的电阻值约为60Ω。在线路出现开路时,网络上的电阻值约为120Ω。在通讯线之间出现短路时,电阻值约为0Ω。
4.CAN 网络中的故障管理
CAN网络由中央电子模块(CEM) 监 控。当 中 央 电 子 模 块(CEM)探测到CAN网络中的某个故障时,就会在中央电子模块(CEM)内储存一个诊断故障代码(DTC)。根据不同的故障类型,有不同类型的诊断故障代码 。





