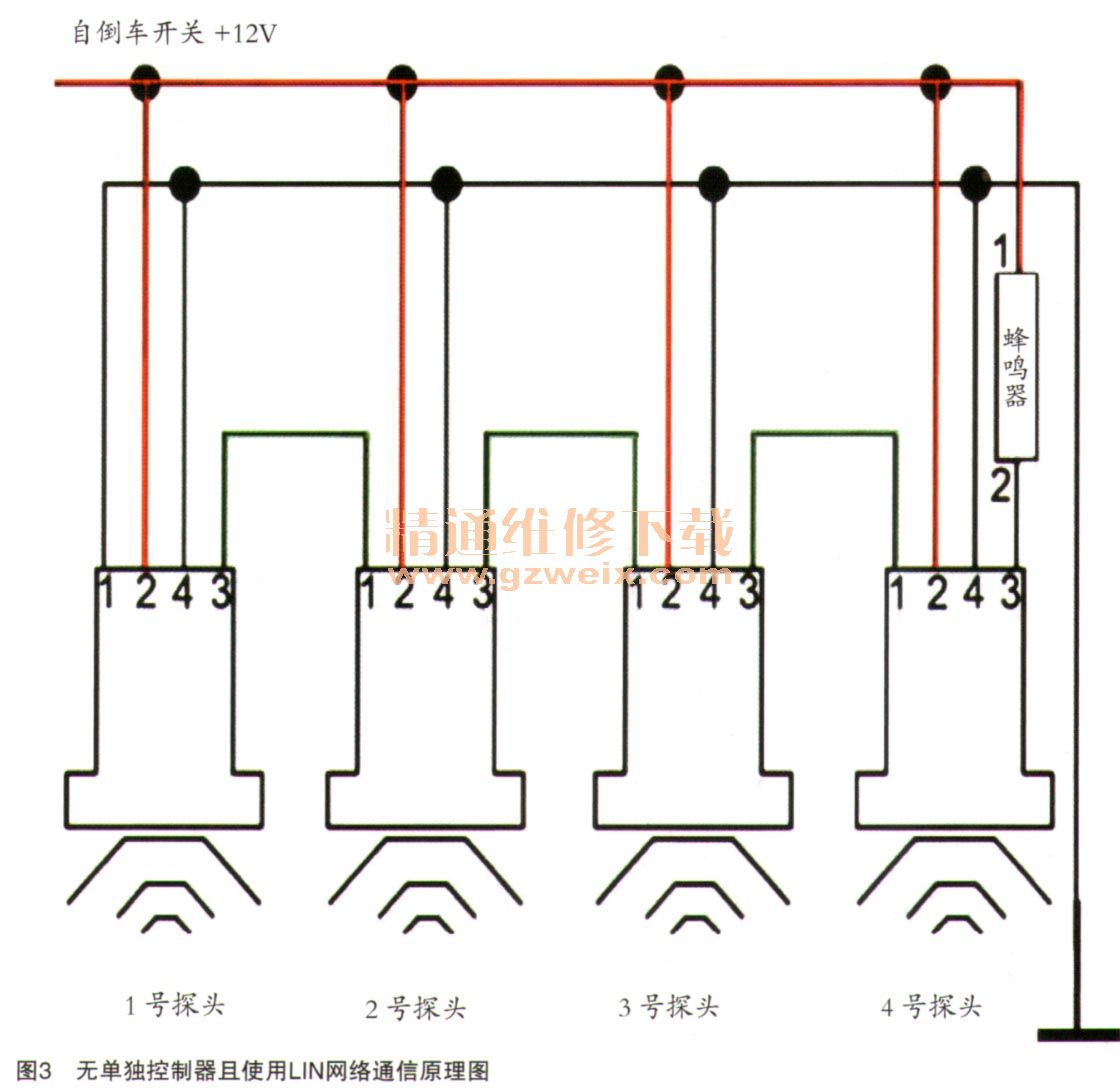
(3)无单独控制器,使用LIN网络通信协议
该系统由雷达探头、蜂鸣器、LIN线构架组成。各探头之间、探头与蜂鸣器之间采用LIN线通信,LIN线传输速率为19.5Kbps。其特点是无雷达控制
ECU(无主机倒车雷达系统),各个探头实现串联式网络连接,系统工作节拍和障碍物数据处理由各自探头自身内部处理完成。探头与探头结构参数完全相同,探头任意安装,上电后自动识别位置;当某个探头出现故障,系统报警且其他探头停止正常工作。
具体原理:挂入倒挡,倒车开关导通,4个雷达探头和蜂鸣器接通12V工作电源,探头将探测到的障碍物信息进行计算,达到报警级别后控制蜂鸣报警器工作,由报警器发出不同的报警声。系统工作原理如图3所示。
(4)无单独控制器,使用LIN网络和CAN网络通信协议
倒车雷达系统由雷达探头、网络调度器、组合仪表(起到蜂鸣报警的作用)、多媒体(显示障碍物的雷达波段信息,也可以根据车型配置取消显示)、LIN线、CAN线网络架构。雷达探头与网络调度器之间通过LIN线连接,传输速率为19.5Kbit/s;每个探头结构和参数完全相同,上电自动识别位置。网络调度器是单独的控制器或者继承在其他模块内部,此车型采用的是
车身控制器(
BCM)为网络调度,通过LIN线连接防撞雷达探头。此外,
车身控制器还通过CAN网络架构与整车CAN网络模块通信。
具体原理:网络调度器(
BCM)在接收到泊车辅助激活信息后,通过LIN线驱动
倒车雷达探头工作,通过CAN线经过网关发送障碍物距离信息和蜂鸣报警信息,组合仪表驱动内部的蜂鸣器进行雷达报警,中央液晶屏显示障碍物距离波段信息。整个系统工作原理如图4所示。

上一页 [1] [2] [3] 下一页


")


