・上一文章:大众途安09G自动变速器掉档、打滑和锁档
・下一文章:奔驰GL雨刮喷水电机按钮失效
九、全地形反馈适应2Auto系统
2013款新揽胜首次引入了下一代全地形反馈适应2Auto.系统。这使得备受赞誉的全地形反馈适应系统功能提升至一个新的台阶。第二代全地形反馈系统控制旋钮如图47所示,与上一代相比,增加了AUTO挡。在AUTO挡,系统监测当前行驶条件,并提供适合当前地形条件的最佳牵引和性能设置,而无须驾驶者进行干预。无论是路面驾驶还是越野驾驶,抑或是在干燥或干湿混合条件下都能自动选择最适合的地形程序,为驾驶者提供最优的驾驶体验。当然,如有需要,驾驶者还是可以选择使用手动全地形反馈适应系统。新系统部件包含集成式悬挂控制模块(ISCM)和全地形反馈开关组(TS),全地形反馈适应2Auto系统的所有功能均由ISCM控制。ISCM如图48所示,它位于装载空间的右后侧,通过高速CAN与全地形反馈开关组进行通信。全地形反馈开关组(TS)如图49所示,它用于手动选择可用的全地形反馈nm操作模式。此旋转开关仅是模式选择器,将信息输入ISCM, TS不包含任何控制功能。当手动使用系统时,全地形反馈适应2Auto系统持续监测行驶条件,并且当其计算出当前的驾驶模式不适用于地形条件时,会建议驾驶者选择不同的模式。可用工作模式有:


·专用程序关闭
· Grass/Gravel/Snow(草地/碎石地/雪地)
· Mud/Ruts(泥地/沟地)
·Sand(沙地)
·Rockcrawl(岩石爬行)
可通过按下模式选择器开关来选择全地形反馈适应2Auto模式。在自动模式下,系统使用来自多个来源的输入,并利用这些信息计算出适用于车辆所处地形类型的最佳工作模式。输入包括:
·环境空气温度
·发动机扭矩
·变速器挡位
·滚动阻力
·海拔
·悬挂高度和行程
系统确定最佳设置后,会与所需的任何模块进行通信,以确保正确设置已就位。
例如以下模块:
·分动箱控制模块
·变速器控制模块
·发动机控制模块
·动力转向控制模块
·ABS模块
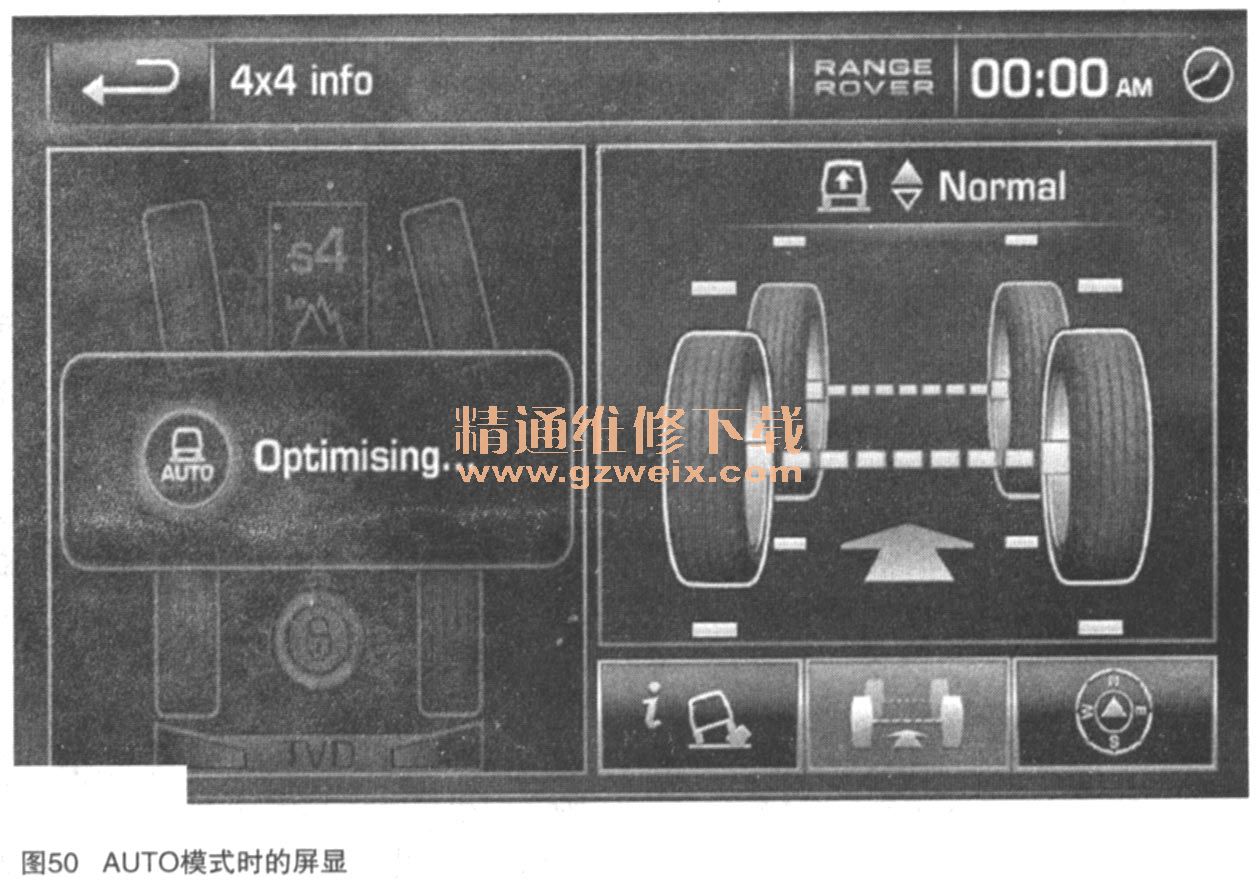
在自动模式期间,全地形反馈系统将显示“Optimising”(正在优化)的屏幕,如图50所示。相应信息显示在仪表组合消息中心,通知驾驶员可以对车辆操作参数进行哪些改善,以便针对主要路况对车辆进行优化。缺乏经验的越野驾驶员可得益于全地形反馈适应系统和驾驶员信息的自动辅助。经验丰富的越野驾驶者根据极端条件选择特定程序,以便获得对车辆系统的控制,例如变速器换挡参数、加速踏板参数或牵引设置。与全地形相关的模块如图51所示。

十、适应减震系统
1.适应减震系统概述
自适应减震系统是一种电子控制的悬挂系统,它根据主要的驾驶条件持续不断地调节悬挂减震器的减震特性。自适应减震系统相关部件如图52所示。该系统由集成式悬挂控制模块控制。该模块接收来自3个加速计、4个悬挂高度传感器和来自其他车辆系统的信号,借以计算车辆状态、车身和车轮移行状态和驾驶员操作输入。控制模块使用这些信号将各减震器的减震特性控制在适当的水平,从而改善车身控制和车辆驾乘舒适度。

2.减震器调节
自适应减震器如图53所示。自适应减震器为充油和气体加压的单筒单元。为保持车轮竖向行程,后减震器使用了一个额外的外部蓄能器。车辆采用电子控制阀行驶时,可调整减震力。与典型的被动减震器相比,这些减震器可在车辆控制和驾乘舒适度之间实现更好的平衡。所有减震器均有电气接头,其位置在活塞杆的端部、顶部支架的中心。

如图54所示,所有减震器中的减震调节均通过一个电磁式可变节流孔来控制,该节流孔为减震器内的油液流动打开第二条通道。当电磁阀断电后,旁路关闭,所有液压油全部流过主(刚性)阀。电磁阀启动后,移动衔铁和控制叶片。当电磁阀断电后,弹簧将阀门返回至其关闭状态。控制叶片上有一个节流孔,叶片滑入腔体内以按要求打开旁路。当柔性阀通电且减震器进入压缩过程时,一部分液压油会从活塞的下部分流入,经过:

·1根中空活塞杆
·1个单独的软(柔性)阀
·1个滑动腔体和节流孔
然后进入减震器的上部,从旁通过主(刚性)阀。在回升过程中,液压油沿相反方向流动。平行作用的两个阀门可以确保减震器以一个更柔和的状态工作。减震器在这两个界限条件之间工作。
各减震器中的电磁阀由来自集成式悬挂控制模块的526HzPWM(pulsewidthmodulation)电流需求量操控。当模块完全启动后,它使用1.5A电流来操控柔性设置下的减震器。
当断电后(0A),减震器处于刚性设置。电流按需持续不断地变动,借此分别增加或减小各减震器的减震能力。
(1)集成悬挂控制模块。集成式悬挂控制模块位于右后侧围板上,参见图46所示。
(2)加速计。如图55所示,自适应减震系统中使用了3个加速计,分别是后、右前部、左前部加速计。该加速度表测量垂直平面上的加速度,并向集成式悬挂控制模块输出相应的模拟信号。集成式悬挂控制模块中的算法可预测车辆的起落、俯仰和侧倾动作,用于控制车身模式。
每个加速计通过3根导线连接到集成式悬挂控制模块,各导线分别提供接地、5V电源和信号反馈。感测元件由单一平行板式电容器组成,其中一块板根据施力(加速度)相对另一块板移动。这使得电容变化能够反映实施的加速度。此电容与电桥电路中的固定参考电容器加以比较,信号由专用集成电路处理,以便产生能够反映施加的加速度的输出电压。该传感器输出(1±0.05)V/g的信号电压。
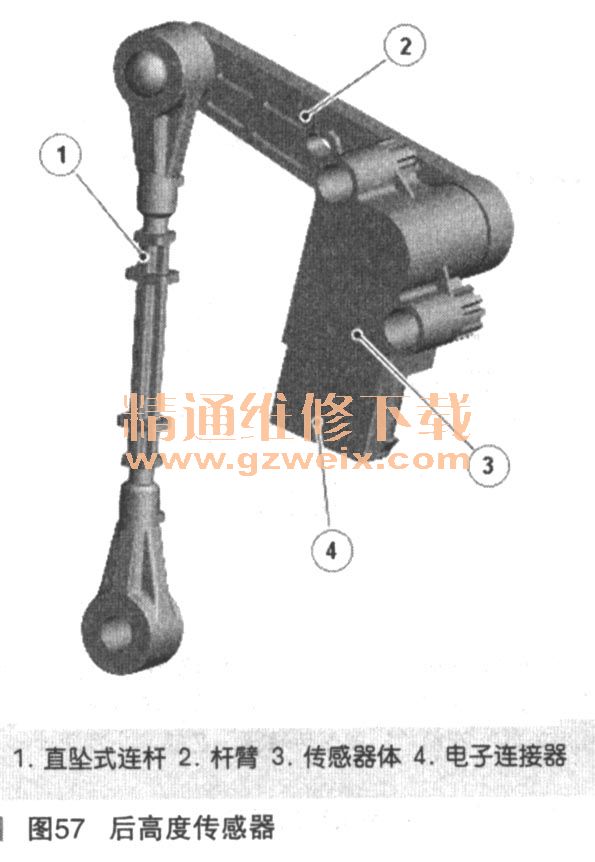
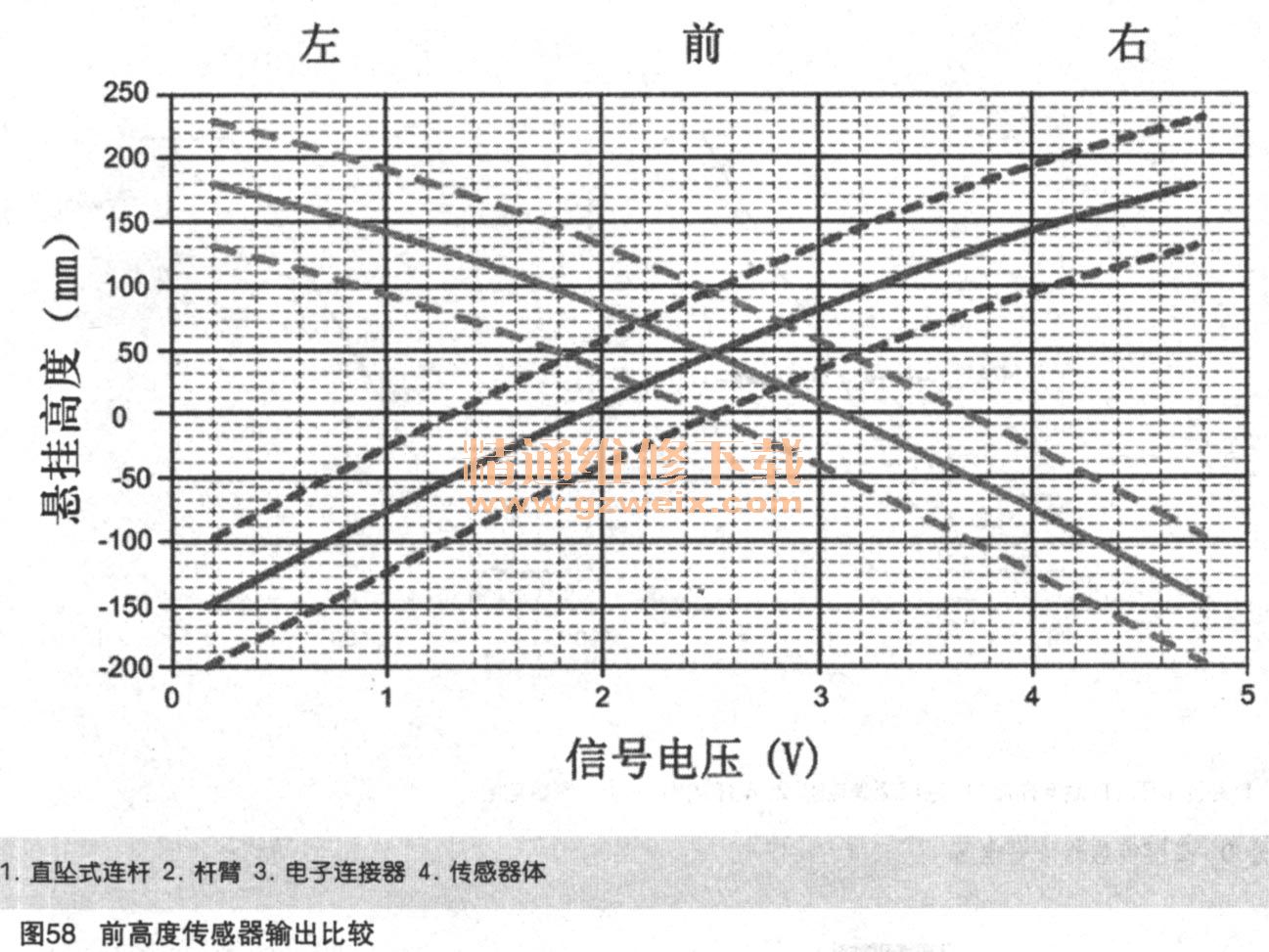
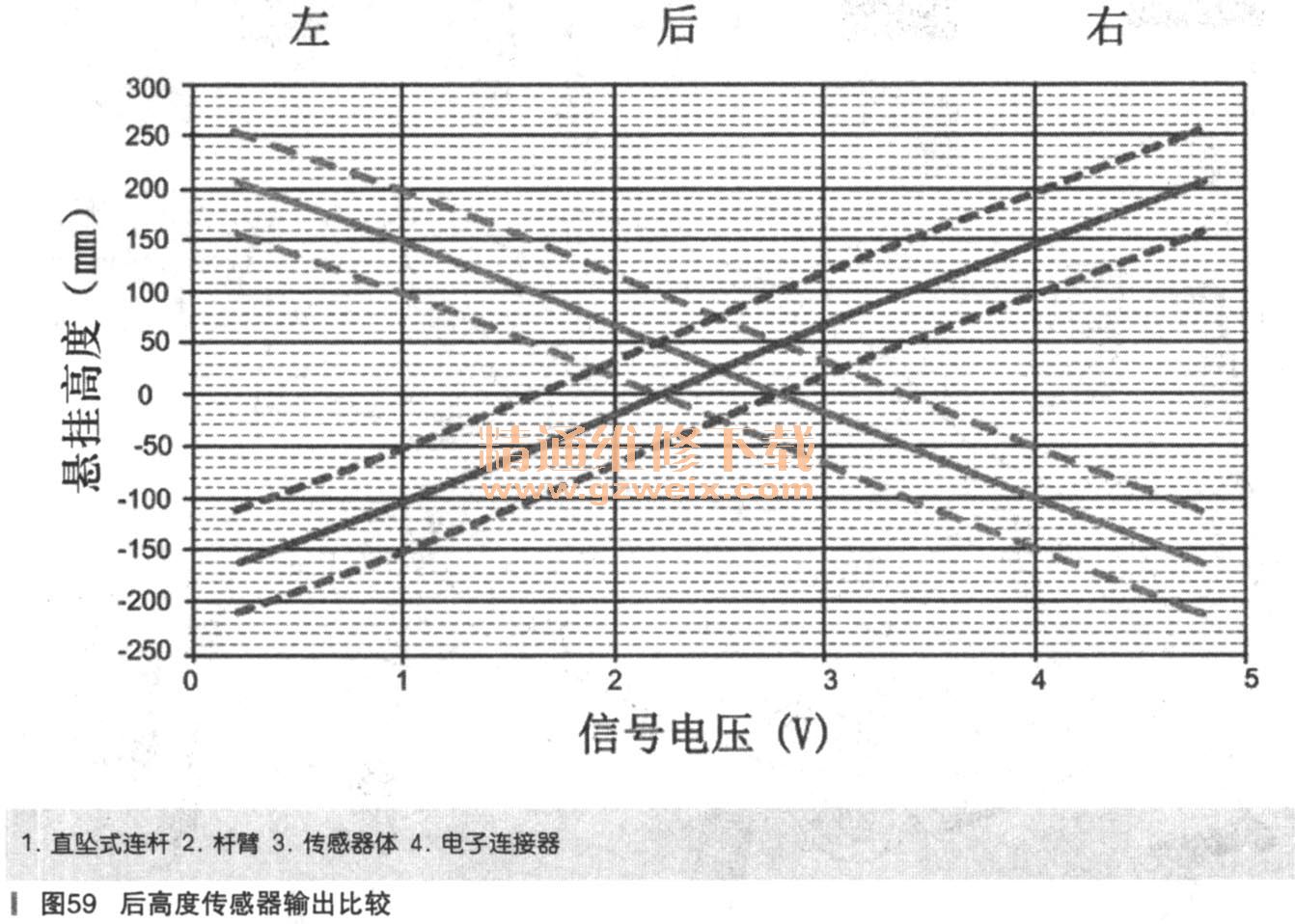
(3)高度传感器。空气悬挂系统中使用的4个悬挂高度传感器也向自适应减震系统提供输入信号,其中两个传感器用于前悬挂,另外两个传感器用于后悬挂。在各悬挂高度传感器上,传感器臂和传感器连杆将悬挂的线性运动转换为传感器轴的旋转运动。悬挂高度传感器测量车辆各角上的悬挂的竖向移位,并向集成式悬挂控制模块输出相应的模拟信号。集成式悬挂控制模块中的算法计算信号的位置、速度和频率要素,并将这些结果用于车轮控制。前高度传感器如图56所示,后高度传感器如图57所示。

悬挂高度传感器测量车辆各角上的悬挂的竖向移位,并向集成式悬挂控制模块输出相应的模拟信号。集成式悬挂控制模块中的算法计算信号的位置、速度和频率要素,并将这些结果用于车轮控制。图58和图59标示了车辆高度相对于正常高度的变化与高度传感器输出电压的关系。中间的曲线代表“标称”状态,但取决于公差,实际曲线可能处于上部曲线和下部曲线之间的任何位置。
使用路虎许可的诊断系统来执行校准例行程序,以便读取车辆各角的位置,将设置记录在控制模块存储器中。一旦设置,就不需要执行校准,除非集成式悬挂控制模块已卸下或更换、空气传感器已卸下或更换,或者传感器连接的悬挂臂已卸下或更换。如果随后重新安装卸下的高度传感器,则必须执行校准程序,以确保系统的完整性。如果装配更换的直坠式连杆,则需要进行校准。
感测元件包含一组霍尔效应装置,这些装置用于测量连接在传感器轴末端的小磁铁的磁场方向。随着传感器轴的旋转,磁铁的磁通量线也随之旋转。霍尔效应元件发出的信号由专用集成电路来处理,借以产生体现传感器轴旋转信息的输出电压。传感器的测量范围是标称位置±40°,标称灵敏度是57mV/轴旋转度数。图60所示为:随传感器在40°范围内及超出此范围旋转,输出信号重复变化的情况。

")
")
")
")

