・上一文章:详解锡柴天然气发动机的结构、特点及原理
・下一文章:海信TLM42V78X3D型液晶彩电黑屏故障检修
三、2015年款路虎自适应动态系统
路虎2015年款自适应动态系统由自适应减振系统和空气悬架系统组成,自适应减振系统的阻尼部件采用电控液压式减振器,其阻尼系统持续可变。空气悬架系统的弹性元件采用空气弹簧(气囊),悬架高度可根据载荷及路况进行动态调节。
两个系统采用同一个主控模块(集成式悬架控制模块)进行控制,其他部分部件也共用,从而实现动态悬架控制功能。
(一)自适应减振系统
1.部件位置
路虎2015年款自适应减振系统的部件位置如图27所示。

该自适应减振系统由集成式悬架控制模块控制。该模块接收来自3个加速度传感器、4个高度传感器和来自其他系统的信号,计算车身和车轮运动状态及驾驶员操作意图。集成式悬架控制模块根据这些信号将各减振器的减振特性控制在适当的水平,从而改善车身控制和车辆驾乘舒适度。
2.部件说明
(1)减振器 自适应减振器是充油和气体加压的单筒减振器。为保持车轮正确行程,后减振器使用一个外部蓄能器。由于集成悬架控制模块能够利用电磁阀来调整自适应减振器的减振力,因此与传统的减振器相比,自适应减振器可在车辆控制和驾乘舒适度之间实现更好的平衡。自适应减振器设有电气接头,其位置在活塞杆的端部、顶部支架的中心。
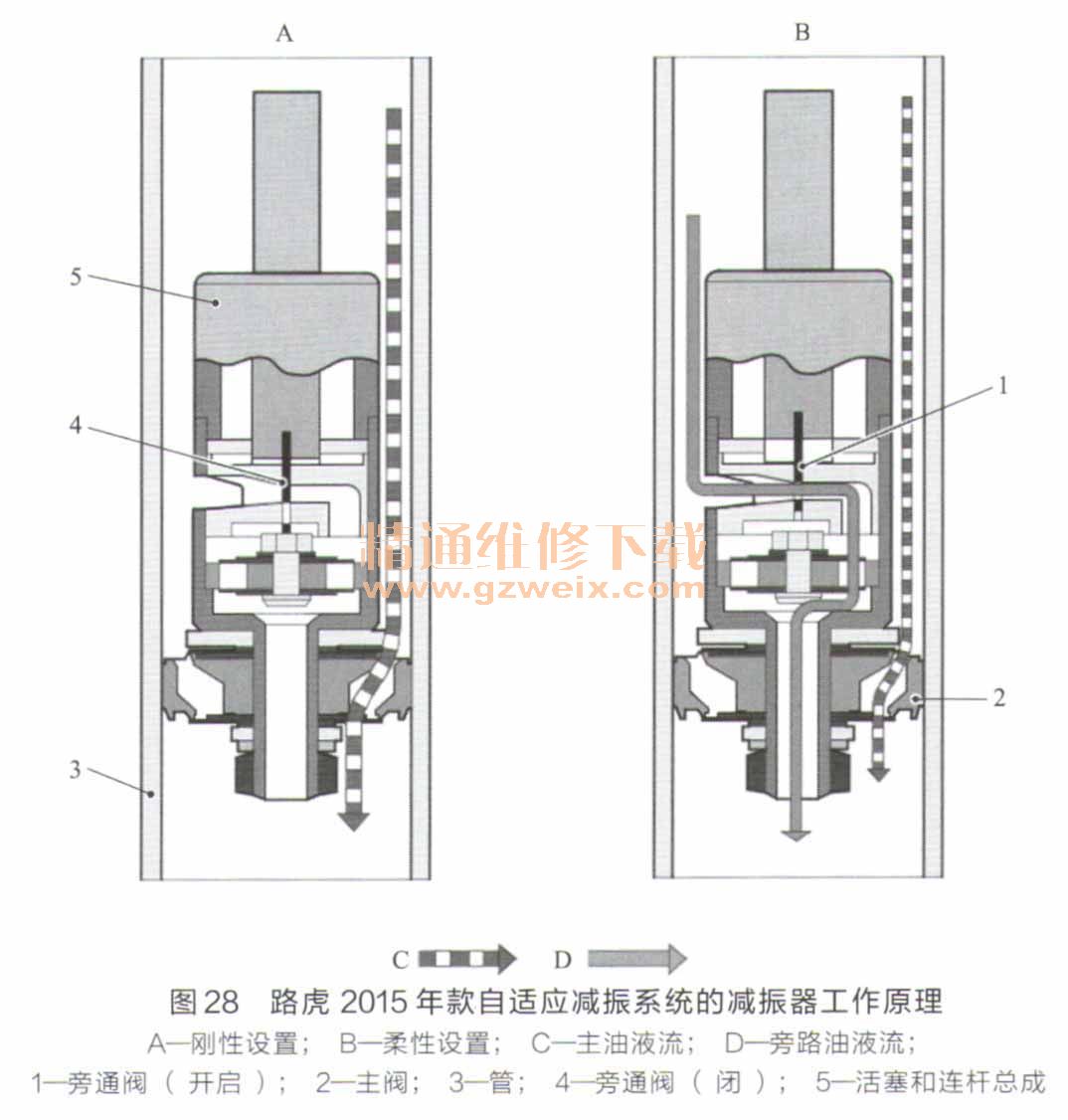
减振器中的电磁阀由来自集成式悬架控制模块的526Hz脉宽调制电流控制。当集成式悬架控制模块完全启动时,它使用1. 5A电流来控制柔性设置下的减振器。当电磁阀断电时,减振器处于刚性设置状态。电流按需持续不断地变化,从而增加或减小减振器的减振能力。
路虎2015年款自适应减振系统的减振器工作原理如图28所示。
(2)集成式悬架控制模块 该控制模块位于右后侧围板上,它是自适应减振系统的主控模块,如图29所示。

(3)加速度传感器 自适应减振系统中使用3个加速度传感器(后加速度传感器、右前加速度传感器、左前加速度传感器),如图30所示。

加速度传感器通过3根导线与集成式悬架控制模块相连,这3导线分别提供接地、5V电源和信号反馈。
加速度传感器由单一平行板式电容器组成,其中一块板根据施力(加速度)相对另一块板移动。这使得电容变化能够反映实时的加速度。该电容信号与电桥电路中的固定参考电容值进行比较,产生能够反映加速度的电压信号。加速度传感器输出1. 00V/g±0.05V/g (g表示重力加速度)的信号电压。
(4)高度传感器
路虎2015年款自适应减振系统的前高度传感器如图31所示。

路虎2015年款自适应减振系统的后高度传感器如图32所示。
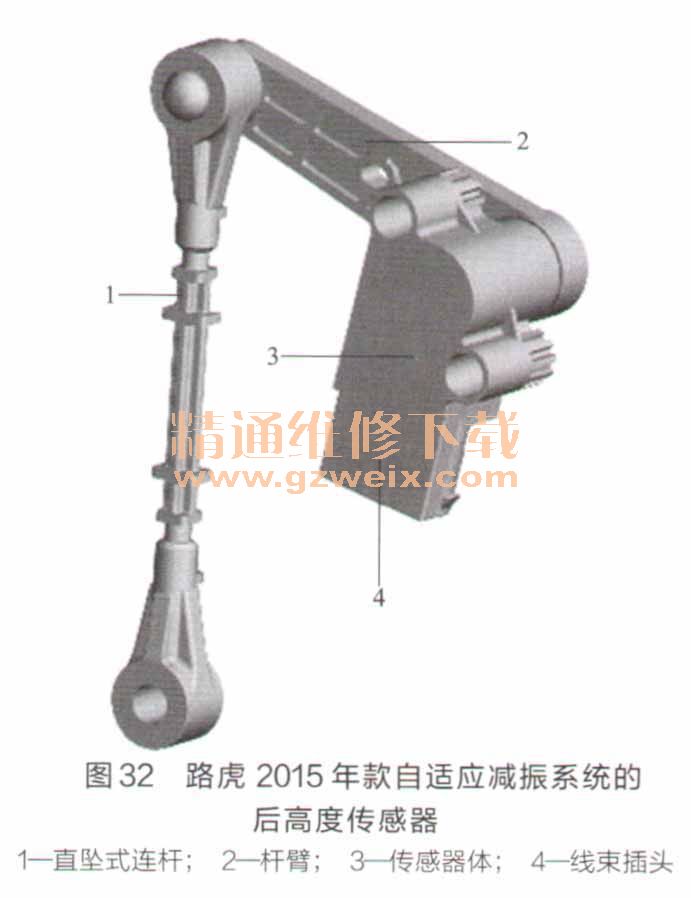
悬架高度传感器测量车辆各角上的悬架的竖向移位,并向集成式悬架控制模块输出相应的模拟信号。
车辆使用期间则不需要再执行校准功能,除非出现以下情况:拆卸或更换集成式悬架控制模块、拆卸或更换高度传感器、拆卸或更换高度传感器连接的悬架臂、拆卸或更换高度传感器的直坠式连杆。
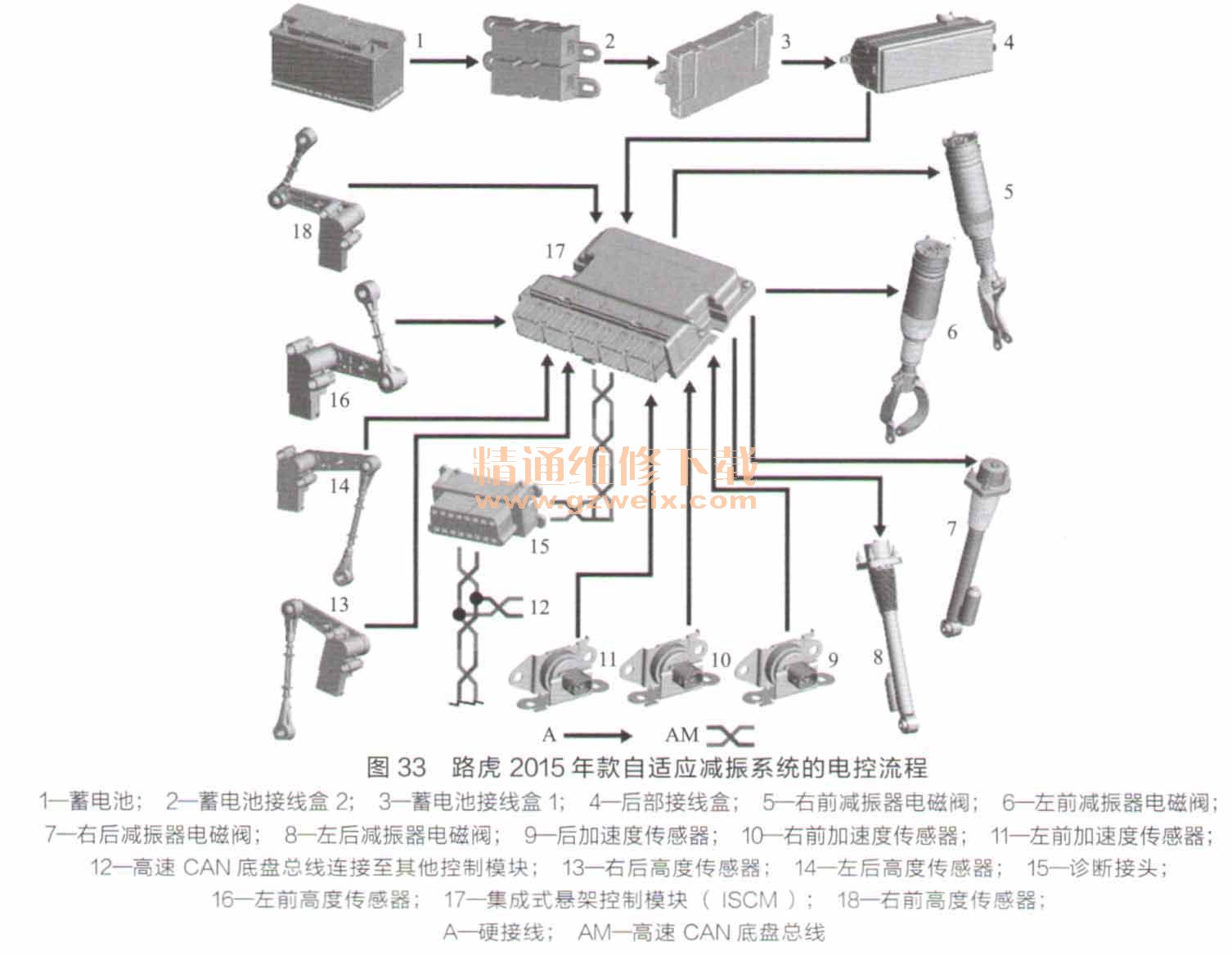
3.电控流程
路虎2015年款自适应减振系统的电控流程如图33所示。
")
")
")
")

