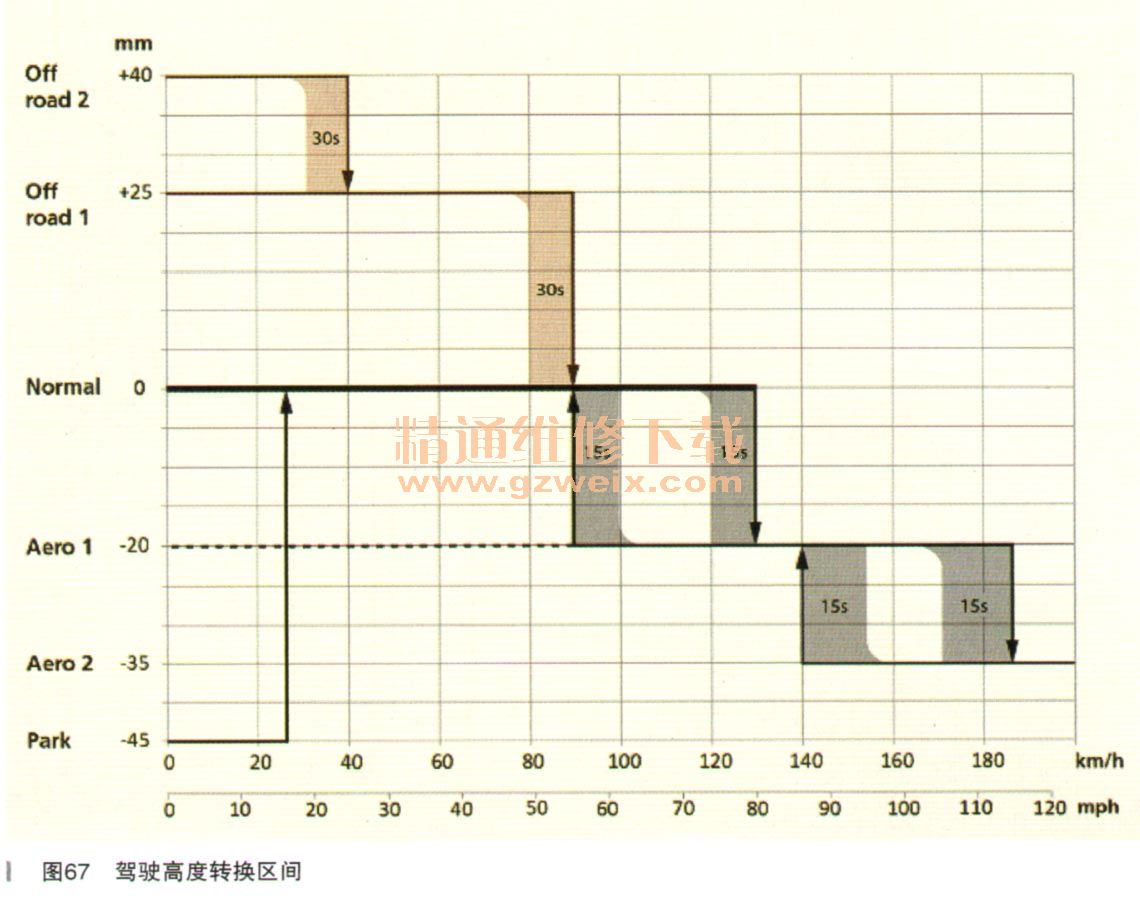
正常(参考高度)为适用于所有其他驾驶模式的默认高度。
运动1(-20mm)降低驾驶高度以增强其空气动力学性能,可在车速超过130km/h时自动启用,也可手动启用。
运动2(-35mm)是唯一不能由驾驶员选择的驾驶高度,在车速超过185km/h时将自动启用。
驻车(-45mm)为最低高度设置,同时也是方便上/下车策略的一部分。该模式可在速度低于24km/h时启用,同时也可在挂入P挡时自动启用(可通过MTC+进行设置)。
在车速超过上述阈值时,将立即触发驾驶高度自动转换(如图67所示垂直箭头),或者在车速非常接近阈值时,延迟数秒转换(阴影区域)。这种控制也会有些许滞后,也就是说,阈值会因升速还是降速而有所不同。
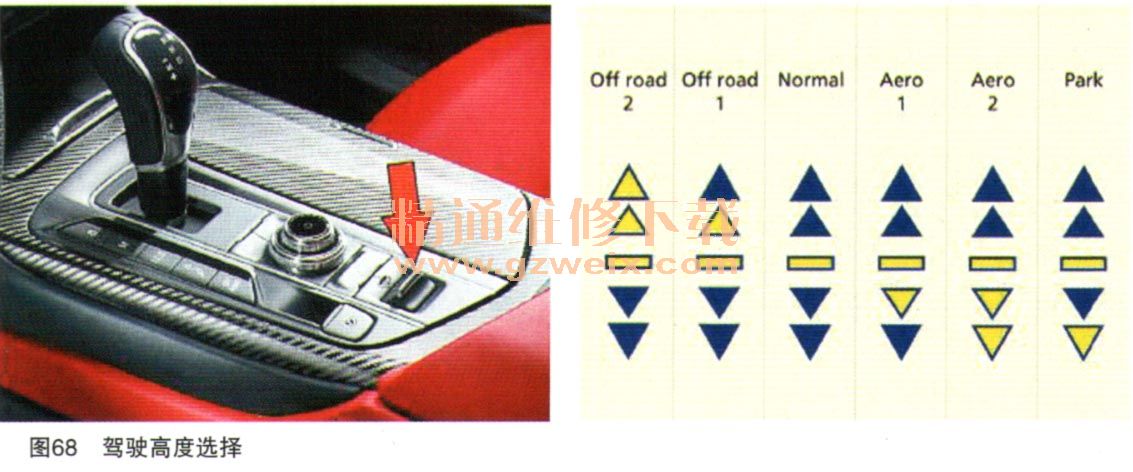
(5)驾驶高度选择:ASBM2
驾驶员可通过标有ASBM2(附件开关组模块2)的中控台上的摇臂开关选择所需的驾驶高度(在当前车速允许的范围内进行选择),该模块负责执行驾驶模式按钮面板(ASBM 1)的功能,如图68所示。开关通过LIN连接到
BCM、其中含有5个LED灯,用于显示当前所选高度(常亮),或是将达到的目标高度(闪烁)。为保护车辆以及乘员,只能在所有车门、尾门都关闭时改变驾驶高度。
(6)驾驶高度与驾驶模式
大部分驾驶高度都适用于所有驾驶模式,仅越野模式与相关高度例外,如表22所示。
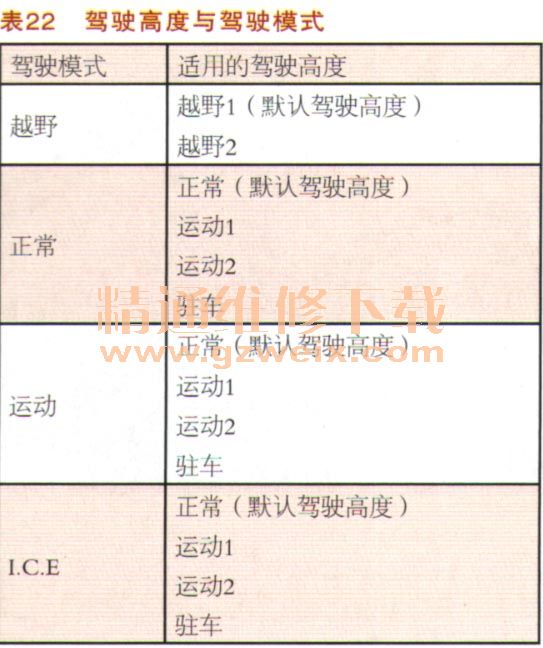
请注意,运动2驾驶高度仅在高速行驶时自动启用。如果通过ASBM2手动选择驾驶高度时,运动2将被直接跳过(系统直接在运动1与驻车之间切换)。如果驾驶高度设置不适用于当前所选驾驶模式,则将自动改变驾驶模式,以适应驾驶员请求的驾驶高度(例如,从“越野1”切换到 “正常”,反之亦然)。
(7)点火开关打开与关闭时的操作
点火开关打开时,车辆将重置为 “正常”驾驶模式与驾驶高度。但需要注意的是,如果车辆保持在“越野模式”,在打开点火开关后,车辆高度不会下降,以防车辆停在极不规则地形上时,因降低车身而损坏底板与车底部件。也是出于同样的原因,越野模式是唯一不能适用“驻车”高度的驾驶模式。
上一页 [1] [2] [3] [4] [5] 下一页
")
")
")
")

