・上一文章:小贝WQP4-ATE洗碗机常见故障检修
・下一文章:路虎发现神行顶置显示屏结构原理

不能再孤立地考虑“硬阻尼器”驾驶设置和驾驶模式。只有在选择“运动”模式的前提下才能选择“硬阻尼器”驾驶设置。
驾驶高度传感器经过重新设计,同时作为Skyhok系统的输入使用。因此,在之前设置的基础上,新增了两种输入信号(后轮动作),同时升级了软件以利用它们的优势。
鉴于此,无须再在前轮座上安装的两个竖直加速传感器,因而已将它们移除。
另一方面,仍然保留了底盘上安装的竖直加速计,并且其位署与M156-7车型上的安装位置相同。保留了3个车身加速传感器,分别位于两侧前悬架上部,以及后右侧悬架上部,如图71所示。

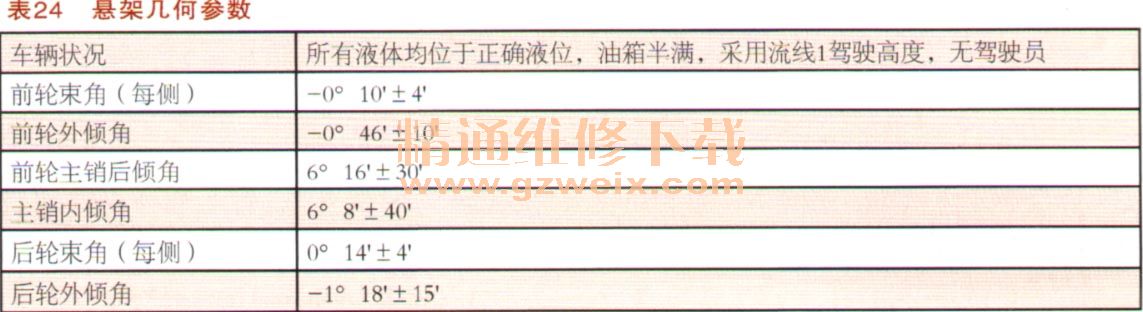
(八)车轮几何与定位
可调整以下与车辆车轮几何相关的参数:
·前轮束角:通过松开横向转向杆固定螺钉,然后转动横向转向杆进行调整
·前轮外倾角:通过旋动底盘侧下部悬架杆的两个偏心螺栓进行调整
·前轮主销后倾角:通过旋动底盘侧下部悬架杆的两个偏心螺栓进行调整
·后轮束角:通过松开底盘侧后轮距控制杆的螺栓,然后调整调节螺钉进行调整
·后轮外倾角:通过旋动底盘侧上部悬架连接件的两个偏心螺栓进行调整
需要一对特殊工具来调整后轮外倾角:用于调节一的特定扳手(P/n900028638),以及用于拧紧悬架杆螺栓的转接工具(p/n900000472)。
表25列出了Levante悬架四轮定位值,可能会有变动。
")
")
")
")

