・上一文章:宝马740Li轿车蓄电池低电量报警
・下一文章:大众帕萨特急加速时仪表的各故障指示灯交替间歇闪烁
二、具有停停走走功能的自适应巡航控制系统(带距离传感器)
1.概述
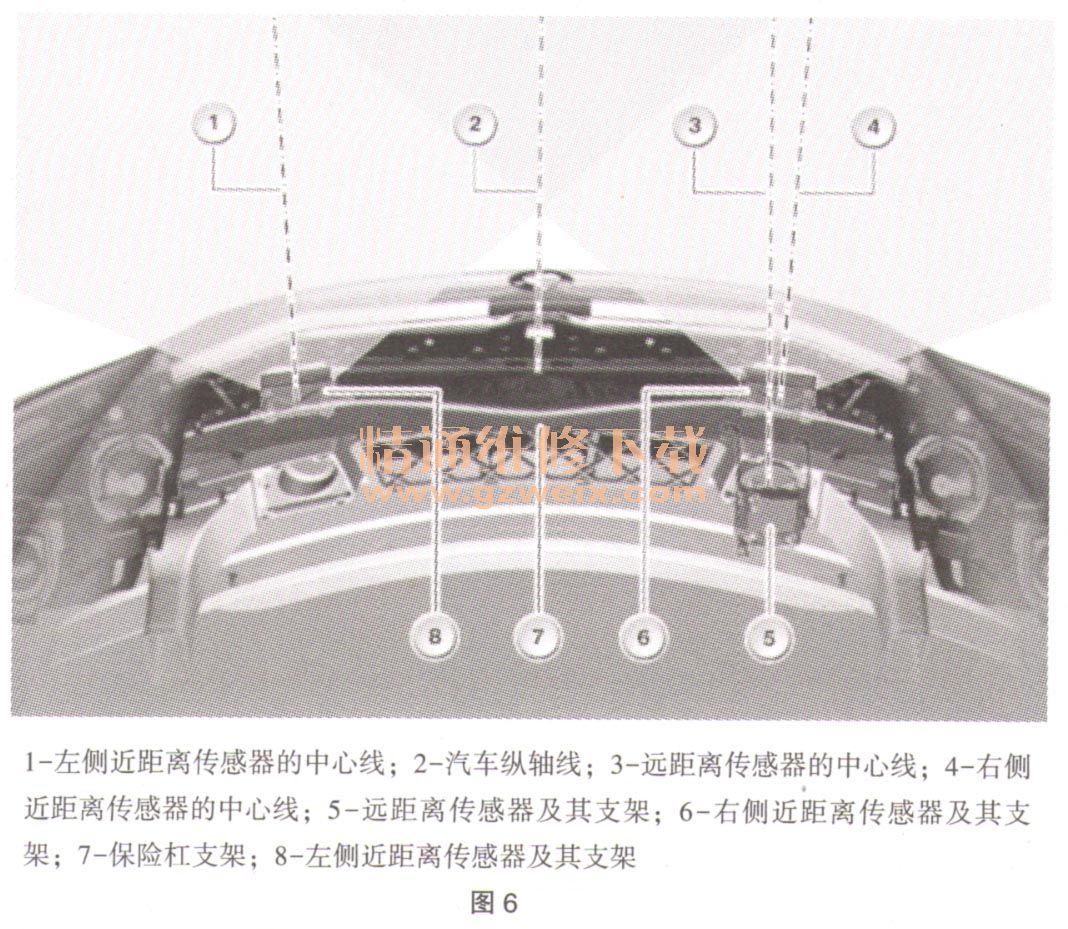
在某些市场上,由于进入限制而提供不带停停走走功能的ACC。如果ACC不带停停走走功能,则不安装近距离传感器,如图6所示。
在售后服务时注意下列提示。
①远距离传感器(LRR)的诊断通过ICM控制单元进行。ICM控制单元因此是LRR控制单元的网关。
如果ICM控制单元损坏或未连接,则不能对LRR进行诊断:控制单元不应答。
②更换后必须对ICM控制单元重新设码。
③在更换后必须重新对远距离传感器进行设码。
④近距离传感器已通过连接插头的线脚布置自动设码(更换近距离传感器后不需要单独设码)。
⑤更换远距离传感器后必须对其重新进行设置:注意相应的服务功能。
⑥更换近距离传感器时,安装时要注意准确的安装位置:按照维修说明。不需要进行类似于远距离传感器的设置。然而必须在ICM控制单元中重新存储该传感器的安装角度。注意相应的服务功能。
2.引言
带停停走走功能的定速控制自2007年以来已经可在5系和6系中提供。作为对熟悉的定速控制的补充,停停走走地行驶能够:通过发动机或制动干预进行定距和定速控制直到静止状态;在短暂的停车时间(1~3s)后从静止状态中自动启动;自适应制动辅助系统。
设置速度时,可在30~180km/h范围内选择:在舒适模式下以10为步进值或在精细模式下以1为步进值。设置速度在组合仪表上显示。此外能够在4种距离之间进行选择。
3.部件简短描述
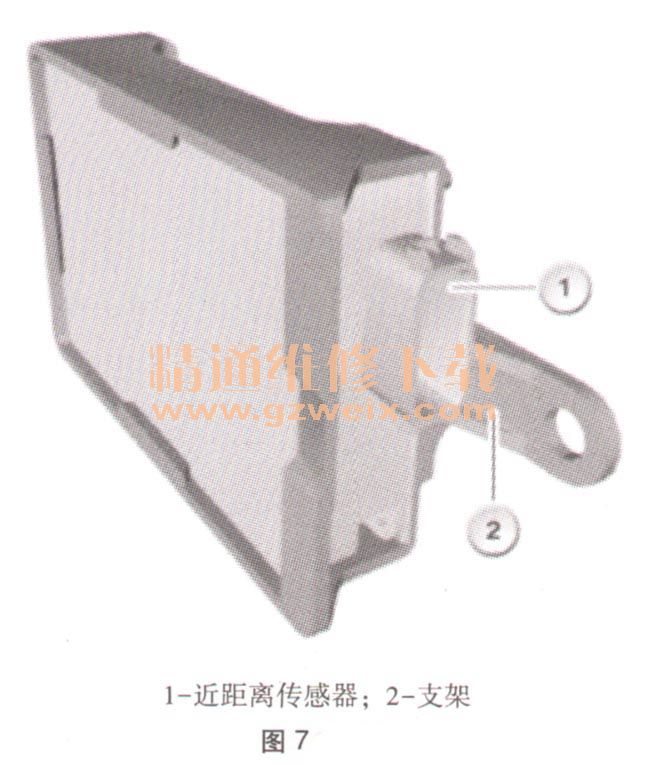
(1)左右近距离传感器。这两个近距离传感器是雷达传感器(近距离雷达)。为带停停走走功能的ACC安装了2个相同的近距离传感器。这些近距离传感器用一个塑料支架安装在前部保险杠支架上,如图7所示。
近距离传感器通过传感器CAN(S-CAN)与ICM控制单元连接。近距离传感器具有下列任务:计算位置和运动数据、探测车辆前方30m附近范围内的目标。近距离传感器的目标数据只用于带停停走走功能的ACC(不适用于自适应制动辅助系统)。
(2) LRR:远距离传感器。LRR表示远距离雷达,如图8所示。

远距离传感器(以前的ACC传感器)是一个雷达传感器。远距离传感器同时还是一个控制单元。因此远距离传感器具有一个控制单元地址,并具有诊断和编程功能。远距离传感器探测运动的目标的距离、角度以及速度。探测范围为车辆前最多150m。在ICM控制单元中,将对这些数据进行处理。
(3) ICM:一体式底盘管理系统。ICM控制单元安装在中央控制台内的变速箱传动轴盖板上。
ICM控制单元执行具有停停走走功能的ACC的下列任务:汇总雷达传感器传送的目标数据;分析目标并选择与定距控制相关的目标;分析操作信号并生成显示信号;调节速度和距离;生成标准值并通过FlexRay输出到驱动装置和制动器的执行器;监控所有输入信号、控制单元(硬件)以及车辆状态是否有故障或不可信的状态。
(4) S-CAN:传感器CAN。传感器CAN(S-CAN)连接:ICM控制单元、远距离传感器(LRR)、近距离传感器。
")
")
")
")

