・上一文章:宝马740Li轿车蓄电池低电量报警
・下一文章:大众帕萨特急加速时仪表的各故障指示灯交替间歇闪烁
4.系统功能
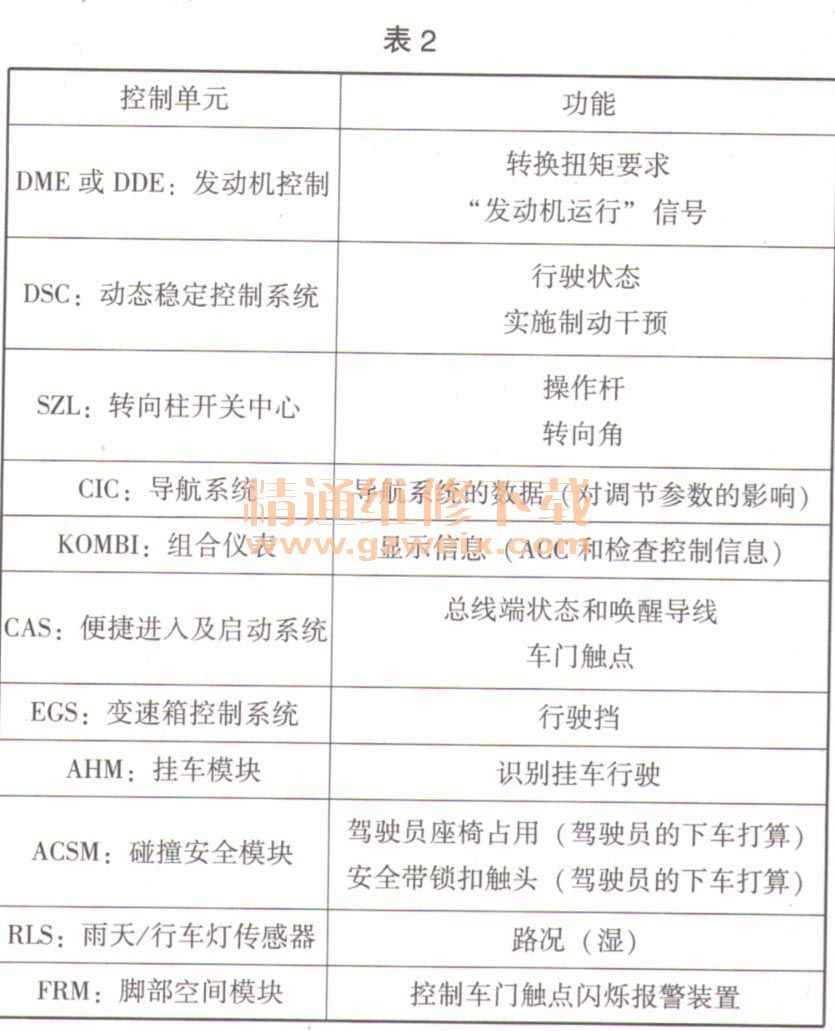
(1)功能联网。为了实现停停走走功能,需要一个复杂系统网络与分散在其他控制单元中的功能。ICM控制单元通过总线与这些其他控制单元连接。为实现总功能,下列控制单元已联网,见表2。
(2)自适应制动辅助系统自适应制动辅助系统是ICM的一项功能。自适应型制动辅助系统仅能向带有停停走走功能的自适应定速控制的车辆提供。自适应制动辅助系统在紧急制动情况下提供最大效用。当前面行驶车辆的驾驶员进行紧急制动,远距离传感器可识别这种情况。此时,制动辅助系统会提供支持,执行最佳制动,以尽可能避免发生追尾撞车事故。
为此存在下列功能:制动系统预充气;根据情况匹配DSC中用于制动功能的一些参数;存在预警时在组合仪表中显示驾驶员视觉报警;在存在紧急警告的情况下,向驾驶员发出视觉和声音报警。
自适应型制动辅助系统可通过驾驶员辅助操作区的相应按钮启用。预警时间点可通过该按钮进行选择(可以分为2级)。自适应型制动辅助系统也可以在未激活ACC停停走走功能的情况下启用。
(3)不希望的系统状态。在达到ACC的功能极限时,可能会出现驾驶员不能理解的系统状态。下面将对这些情况进行描述。
①自己车辆和前面行驶车辆之间的大速度差无法由系统调整。在这种情况下需要驾驶员的制动干预。
②自适应定速控制系统不能对静止的交通堵塞或对面来车做出反应。
③定距控制受雷达传感器识别范围的限制:对于很近并快速拐到自己车辆前面的车辆,需要驾驶员的干预。
④由于雷达传感器的可见视野范围有限,在前面行驶车辆转弯时会丢失目标。这种情况下,应短时抑制设置速度的加速度。原因:防止过于驶近可能仅短时间探测不到的前面行驶车辆。
⑤在雷达传感器“失明”时,例如由于积雪覆盖,ACC自动关闭。驾驶员接收到一条检查控制信息。清洁雷达传感器后ACC可以重新激活。注意:保险杠上近距离传感器区域内的多次喷漆同样会引起近距离传感器“失明”。
⑥在ASC或DSC较长时间干预时(在临界摩擦系数时),ACC关闭。
⑦雨、雾和雪吸收雷达的射线。ACC的作用距离可能显著减小。在特殊情况下ACC不再可用。
⑧道路的凹凸会导致目标的丢失。
⑨在极个别的情况下,探测到的目标的测量值可能错误(通常是角度)。例如由于雷达波束在隧道壁和护栏上的反射。
")
")
")
")

