奔驰车系的驻车系统可实现查找选择停车位、驶入驶出停车位以及挪车等功能,包含下述4个分系统:
1.驻车定位系统PTS(代码220):通过距离传感器确定与障碍物之间的距离,并以影像、语音提示驾驶员。
2.主动式驻车辅助系统(代码235):搜索、检测停车位,计算合适的路线并在多媒体显示屏中显示所有与停车位相关的信息,该系统部分自主或自主干预车辆的行驶和控制系统(加速、制动、转向),并在出现危险情况时警示驾驶员。
3.倒车影像(代码218)或360度影像叶码501):记录车辆周围区域,并通过多媒体显示屏向驾驶员提供实时画面,动态引导线指示当前转向会经过的路线。
4.遥控泊车(代码503):使用智能手机的遥控驻车应用程序在车外遥控驻车。
奔驰车系不同的车型会有不同配置组合的驻车系统,如:低配车型装配带后视摄像头的驻车组件(代码P44),包含主动式驻车辅助系统(代码235)和倒车影像(代码218);高配车型装配带360度影像的驻车组件(代码P47),包含主动式驻车辅助系统代码235)和360度影像代码501)。
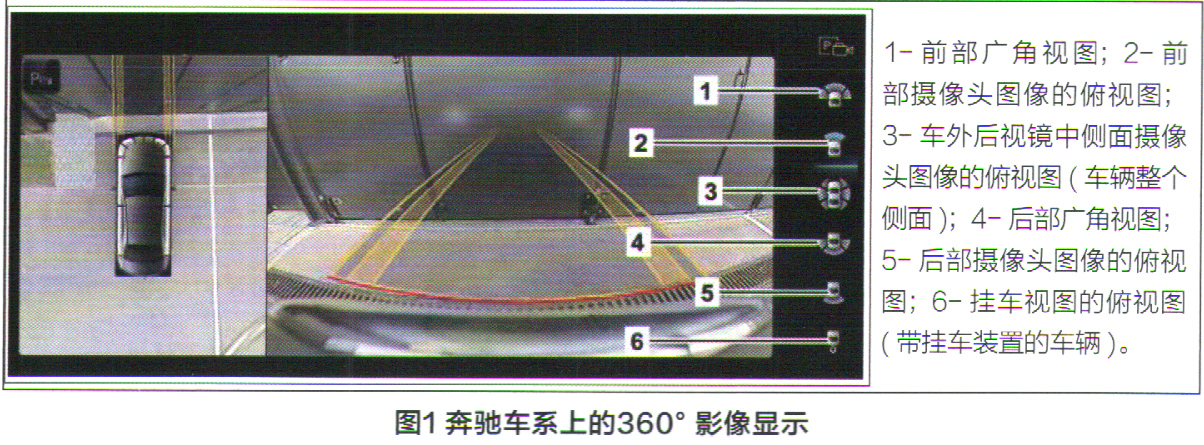
360度影像系统由4个摄像头组成,分别集成在车辆前端(散热器格栅内)、后端(释放拉手内)以及左右侧(两侧车外后视镜外壳中)。这4个单独的360度环视(广角/鱼眼)摄像头获取车辆周围区域的图像,经过图像处理单元畸变还原、视角转化、图像拼接、图像增强,最终形成一幅车辆四周无死角的360度全景俯视图,并显示在多媒体显示屏上。同时,还会向驾驶员显示动态和静态引导线,并根据转向角度形成车辆尺寸和行驶轨迹(行驶路径)。这些影像能够帮助驾驶员在驻车或挪车时,避免车辆碰撞到障碍物。通过对多媒体系统的操作,驾驶员可以选择查看不同角度的360度影像(图1)。
360度影像系统中的每个摄像头均为广角镜头(180”水平视角和123。垂直视角),分辨率为100万像素,由驻车系统控制单元N62为其提供5V的工作电压。系统的工作原理如图2所示。
奔驰3600影像系统的数据传输技术经历过2次技术变革。早期车型采用LVDS低电压差动信号,最新车型则采用了HSVL高速视频链接。例如:E级车(代号213),2021款之前使用的是LVDS技术,2021款(代码801)开始采用HSVL技术。
LVDS(Low-Voltage Differential Signaling)低电压差分信号,是一种低功耗、低误码率、低串扰和低辐射的差分信号技术,传输速率可达到155Mbit/s以上,其核心是采用极低的电压摆幅高速差动传输数据。LVDS之所以成为目前高速I/O接口的高速数据传输的首选技术,主要是因为他在传输速度、功耗、抗噪性、EMI等方面所具有优势,理论极限速率可达1.923Gbit/so LVDS应用于主机与显示屏、摄像头与驻车控制单元之间的视频数字信号传输,并且可以发送音频及控制命令,利用4芯同轴电缆作为传输载体。一根为电源线,一根为接地线,另外两根类似于CAN总线的低压差分信号(Rx+和Rx-)。LVDS通讯传输的工作原理如图3所示。
随着智能网联技术的快速发展,LVDS已无法满足
车载网络对视频传输速度的要求,奔驰车系又开始采用新的视频传输技术—高速视频链接HSVL(HighSpeed Video Link)。与LVDS相比,HSVL的传输速度大幅提高。另外,由于LVDS采用了一种基于同轴线信号传输的电源叠加技术POC(Power Over Coaxial)技术,使得“小型用电器”可以省去单独的供电线路。在同轴电缆中,既可以传输高频信号、又可以传输电源。HSVL的传输载体是1芯同轴电缆,与LVDS的4芯同轴电缆相比,可靠性更高。日SVL最早被应用在2016款奔驰E级(代号213)车上,主要用于主机与显示屏之间,以及驻车控制单元与主机之间的数据传输,但摄像头与驻车控制单元之间仍然采用LVDS。
HSVL与LVDS两种技术都是传输数字信号,电缆无法进行修复,限制插头的插拔次数,且拔插头之前需要先释放静电。他们的不同之处在于传输速率和传输载体。下文将通过两个故障案例详细讲解HSVL与LVDS这两种技术的特点及故障诊断方法。