拉维列奥克斯齿轮组的齿圈、行星传动太阳齿轮和行星齿轮托架等元件通过多片式离合器和多片式制动器的换挡元件交替进行驱动或停止。在此过程中,各行星齿轮可在齿圈的内齿和行星传动太阳齿轮的外齿上转动。这样,无须移动齿轮或换挡轴套就能实现多种传动比以及改变转动方向。如果拉维列奥克斯行星齿轮组的两个部件刚性连接,则该行星齿轮组锁止,并作为一个封闭式装置转动。
拉维列奥克斯行星齿轮组的优点:负荷下的换挡能力、可能产生几个速比、齿轮的常啮合、简单的方向改变、高效、输入和输出位于同轴、紧凑型设计、一个装置内组合的2个行星齿轮系统。
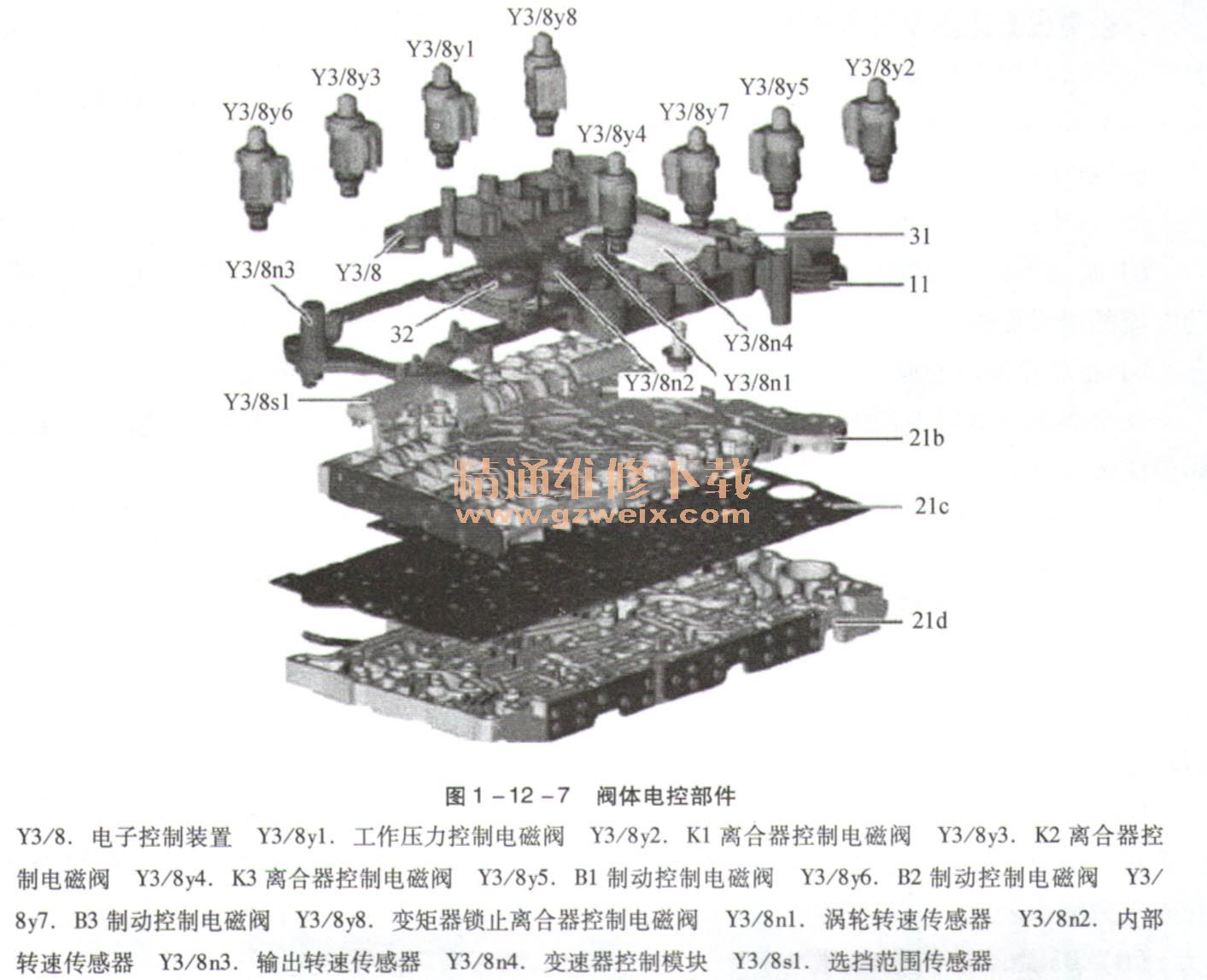
9.阀体电控部件(图1-12-7)说明
(1) K1离合器控制电磁阀。
K1离合器控制电磁阀由变速器控制模块促动K1调节阀的位置。
K1多片式离合器中的压力取决于调节阀的位置,因此取决于K1调节阀的几何形状。
K1离合器控制电磁阀有上升特性。这意味着K1调节阀输出的压力随着启动电流的增大而增加。
K1离合器控制电磁阀输出与由全集成变速器控制模块控制的电流成比例的压力。
在全集成变速器控制应急运行模式下所有的控制电磁阀都断电,因此K1离合器控制电磁阀没有压力输出。
(2) K2离合器控制电磁阀。
K2离合器控制电磁阀由变速器控制模块促动K2调节阀的位置。
K2多片式离合器中的压力取决于K2调节阀的位置,因而依赖于调节阀的几何形状。
K2离合器控制电磁阀具有减弱特性,这意味着应用于K2调节阀中的
ATF油压力随着启动电流的增大而减小。
K2离合器控制电磁阀输出与由全集成变速器控制模块控制的输入电流成比例的压力。
在全集成变速器控制的应急运行模式中,所有控制电磁阀断电,因而K2离合器控制电磁阀提供最大压力。
(3) K3离合器控制电磁阀。
K3离合器控制电磁阀通过变速器控制模块促动K3调节阀的位置。
K3多片式离合器中的压力取决于K3调节阀的位置,并因此依赖于调节阀的几何形状。
K3离合器控制电磁阀具有减弱特性。这意味着应用于K3调节阀中的
ATF油压力随着启动电流的增大而减小。
K3离合器控制电磁阀输出与由全集成变速操纵(VGS)控制模块控制的电流成比例的压力。
在全集成变速器控制的应急运行模式中,所有控制电磁阀断电。因此K3离合器控制电磁阀(VGS)提供最大压力。
(4) B1制动控制电磁阀。
B1制动控制电磁阀通过变速器控制模块促动B1调节阀的位置。
B1多片式制动器中的压力取决于B1调节阀的位置,并因此依赖于调节阀的几何形状。
B1制动控制电磁阀具有减弱特性。这意味着应用于调节阀Bl中的
ATF油压力随着启
动电流的增大而减小。
B1制动控制电磁阀输出与由全集成变速器控制模块控制的电流成比例的压力。
在全集成变速器控制的应急运行模式中,所有控制电磁阀断开。因而B1制动控制电磁阀提供最大压力。
(5) B2制动控制电磁阀。
B2制动控制电磁阀通过变速器控制模块促动B2/BR调节阀的位置。
B2和BR多片式制动器中的压力取决于调节阀的位置,并因此依赖于调节阀B2/BR的几何形状。
B2制动控制电磁阀具有上升特性。这意味着应用于调节阀B2/BR中的
ATF油压力随着启动电流的增大而增大。
B2制动控制电磁阀输出与由全集成变速器控制模块控制的电流成比例的压力。
在全集成变速器控制的应急运行模式中,所有控制电磁阀断电。因而B2制动控制电磁阀无压力输出。
(6) B3制动控制电磁阀。
B3制动控制电磁阀通过变速器控制模块促动B3调节阀的位置。
B3多片式制动器中的压力取决于调节阀的位置,因而依赖于B3调节阀的几何形状。
B3制动控制电磁阀具有上升特性。这意味着应用于B3调节阀中的
ATF油压力随着启动电流的增大而增加。
B3制动控制电磁阀输出与由全集成变速器控制模块控制的输入电流成比例的压力。
在全集成变速器控制的应急运行模式中,所有控制电磁阀断电。因而.B3制动控制电磁阀(VGS)无压力输出。
上一页 [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] 下一页
")
")
")
")

