・上一文章:宝马X5因总线故障导致空调不制冷
・下一文章:解析大众DSG传感器技术
5 底盘
5.1混合动力变速驱动桥
1.概述
THS-11驱动桥系统包括交流500 V的电动机、发电机、行星齿轮及主减速齿轮等,如图123所示。驱动桥使用连续变速传动装置,从而达到操作的平滑性和静谧性。新款普锐斯采用了新开发的P112型混合动力变速驱动桥,它包括驱动车辆用的MG2(2号电动机/发电机)和发电用的MG1(1号电动机/发电机),该驱动桥通过带行星齿轮组的无级变速结构来达到运行平稳、安静的目的,如图124所示。P112型混合动力变速驱动桥是旧款普锐斯和P111型混合动力变速驱动桥的基础上改进而成的,以下所列是为了实现高效和高性能而对变速驱动桥进行的主要改进项目:


·改变了变速驱动桥阻尼器螺旋弹簧的特征;
·MG 1盖上的链轮支架采用了铝材料;
·采用低勃度的变速驱动桥液(ATF WS);
·取消了机油盘;
·采用了滚珠轴承承载中间轴从动齿轮轴。
新旧变速驱动桥的规格见表15。

2.变速桥装置的组成
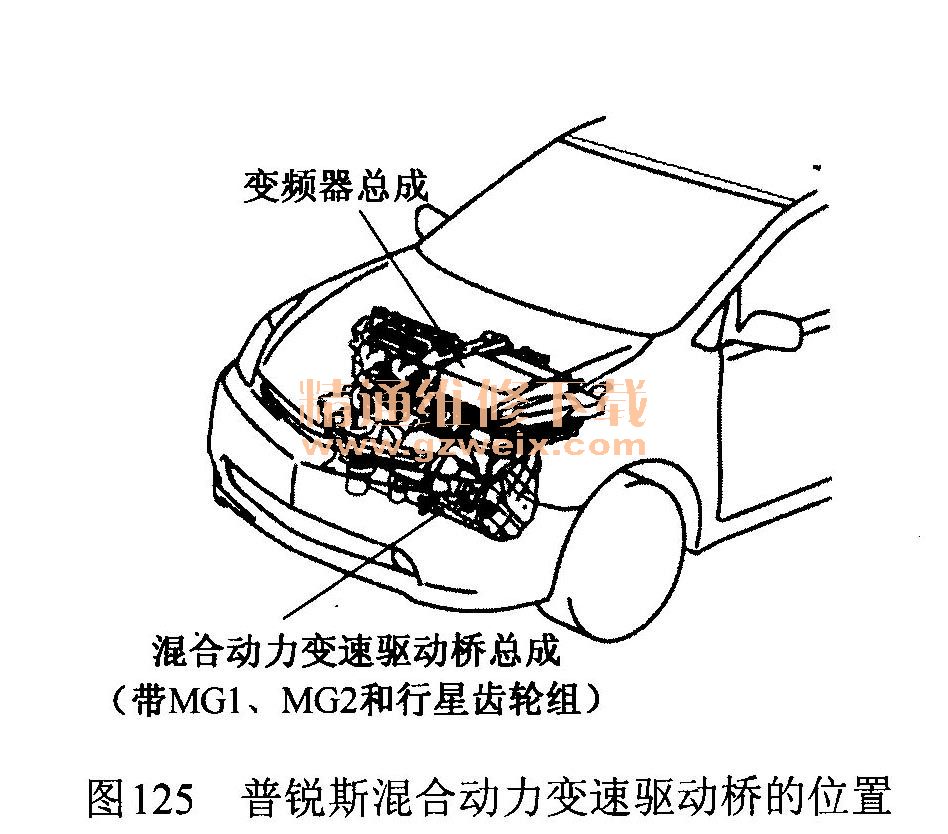
普锐斯混合动力汽车采用新开发的P112型混合动力变速驱动桥,其在汽车中的位置如图125所示。
P112型驱动桥采用带行星齿轮组的无级变速机构来达到平衡运行的目的。
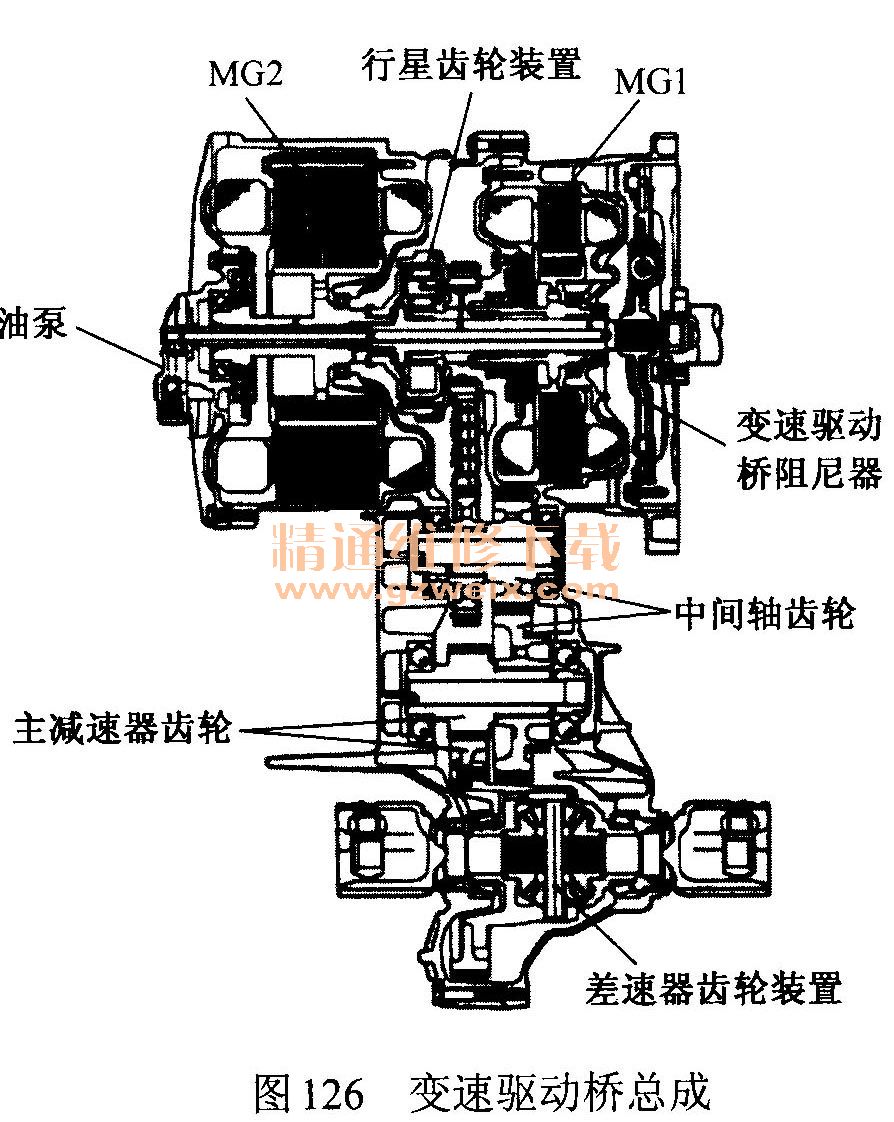
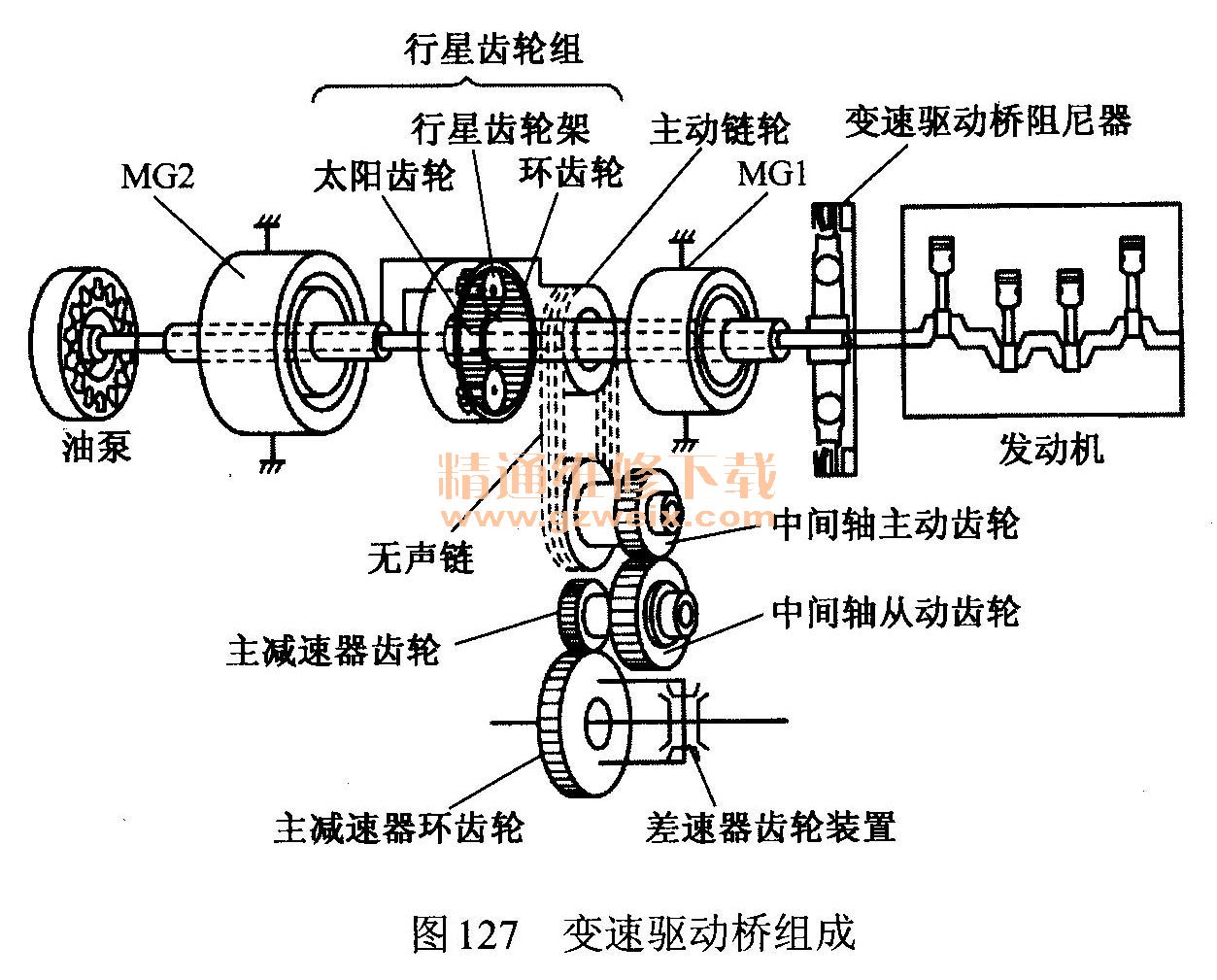
变速驱动桥主要由变速驱动桥阻尼器、MG1、MG2和减速装置(包括链条、中间轴主动齿轮、中间轴从动齿轮、主减速器小齿轮和主减速器环齿轮)组成,如图126所示。行星齿轮组、MG 1、MG2、变速驱动桥阻尼器和主动链轮都安装在同心轴上,动力从主动链轮传输到减速装置,如图127所示。
3.变速驱动桥主要部件
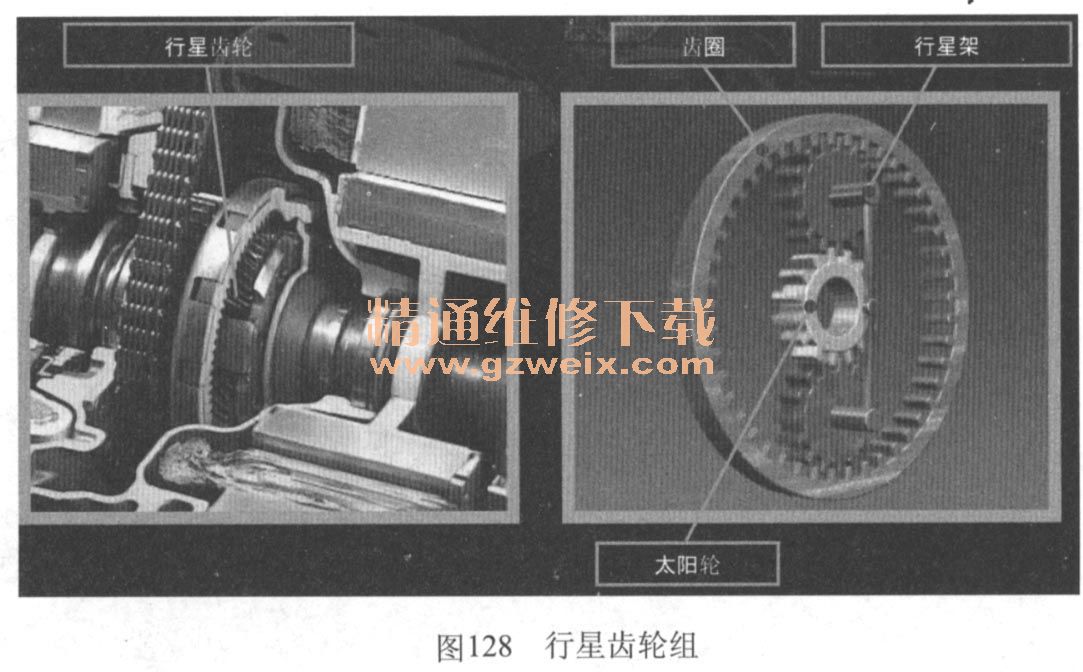
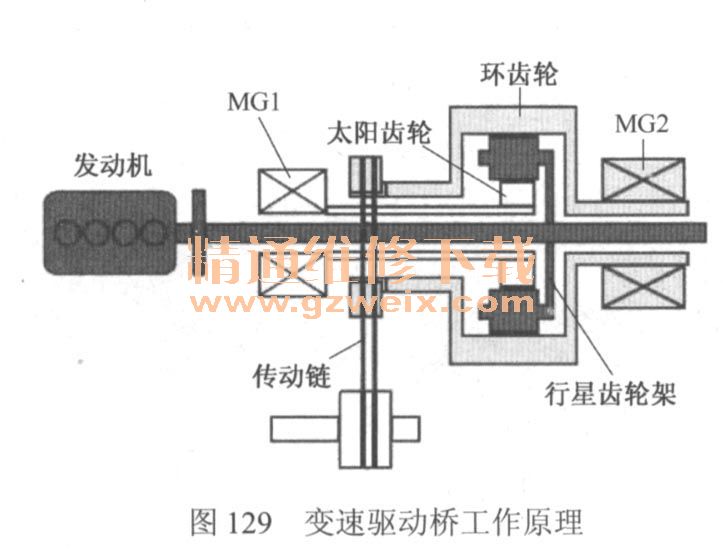
(1)行星齿轮组如图128所示。发动机输出功率通过行星齿轮组的传输分为两部分:一部分驱动汽车;另一部分驱动MG1用来发电。作为行星齿轮的一部分,太阳齿轮连接到MG1上,环齿轮连接到MG2上,行星齿轮架连接到发动机输出轴上,动力通过链传送到中间轴主动齿轮,连接关系见表16,其工作原理如图129所示。

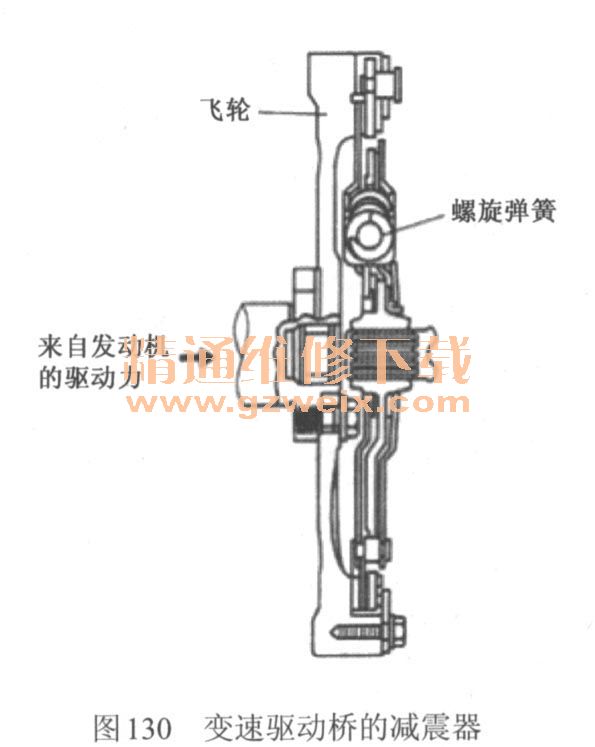
(2)变速驱动桥的减震器,如图130所示。普锐斯变速驱动桥的减震器采用具有低扭转特性的螺旋弹簧,螺旋弹簧的刚度较小,弹性较大,提高了弹簧的减振性能。飞轮的形状得到优化,减轻重量,变速驱动桥减震器传递发动机的驱动力,它包括用干式、单片摩擦材料制成的转矩波动吸收机构。
(3) MG1和MG2。MG1连接在行星齿轮组的太阳齿轮上,MG2连接在环齿轮上。MG1和MG2为精密组件,不得对其进行分解。如果这些组件出现故障,则整体更换混合动力变速驱动桥总成。
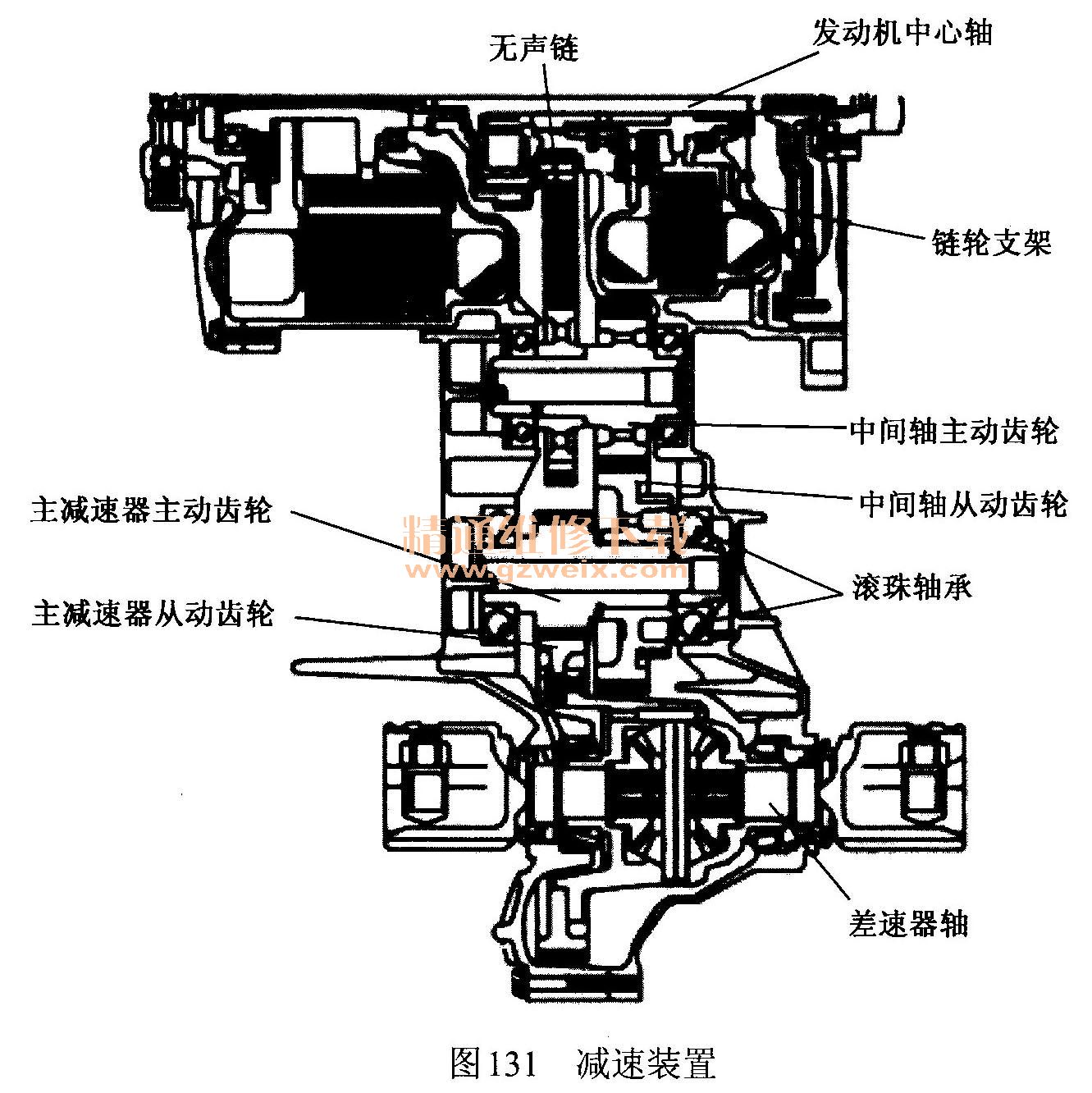
(4)减速装置。MG1盖上的链轮支架采用铝材料,采用滚珠轴承承载中间轴从动齿轮轴。减速装置包括无声链、中间轴齿轮和主减速器齿轮如图131所示。采用小链距的无声链可保证其运行时的静谧性,并且和齿轮传动机构相比,机构的总长度缩短,中间轴齿轮和主减速器齿轮的齿都经过高精密研磨,其齿腹得到了优化,以保证运行的高度安静,主减速器齿轮经过最佳配置,减小了发动机中心轴和差速器轴间的距离,使差速器的结构更加紧凑。
(5)差速器齿轮装置。采用和传统变速驱动桥差速器相类似的小齿轮型差速器齿轮装置。
(6)润滑装置如图132所示。行星齿轮组和主轴轴承使用装有余摆曲线式油泵的强制润滑系统,减速装置和差速器使用同类型的润滑油。

4.换乡当控制系统
紧凑型选挡(变速器换挡总成)的设计融入了新理念:换挡杆为瞬间换挡装置,其安装在仪表盘上,当驾驶员的手离开选挡杆手柄时,它会回到原位,甚至可以用指尖操作,其操作模式给操作者提供了极大的便利。
普锐斯采用了电子通行变速系统。变速器换挡总成内的挡位传感器能检测挡位(R、N、D、B)并发送相应信号到HV ECU。HV ECU控制发动机、MG 1和M碗的转速来产生最佳齿轮速比。
THS-I系统的驻车锁止机构是通过连杆来操作的。而THS-II系统采用了和换挡控制类似的电控装置。当驾驶员按下变速器换挡总成顶部的驻车开关时,P挡控制系统就会激活混合动力变速驱动桥上的换挡控制执行器来机械地锁止中间从动齿轮,该齿轮与驱车锁连接,从而锁止驱车锁。
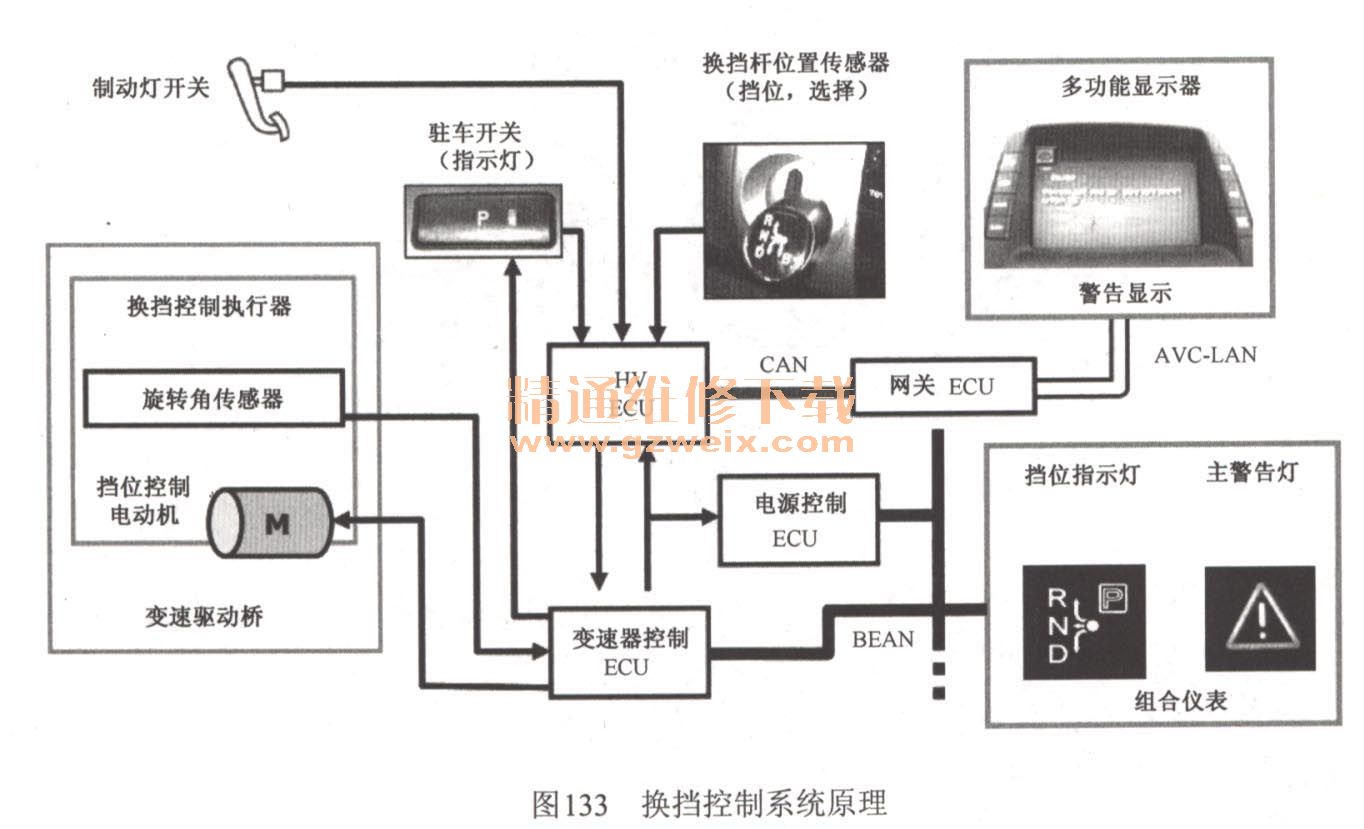
1)换挡控制系统原理
换挡控制系统原理如图133、图134所示。

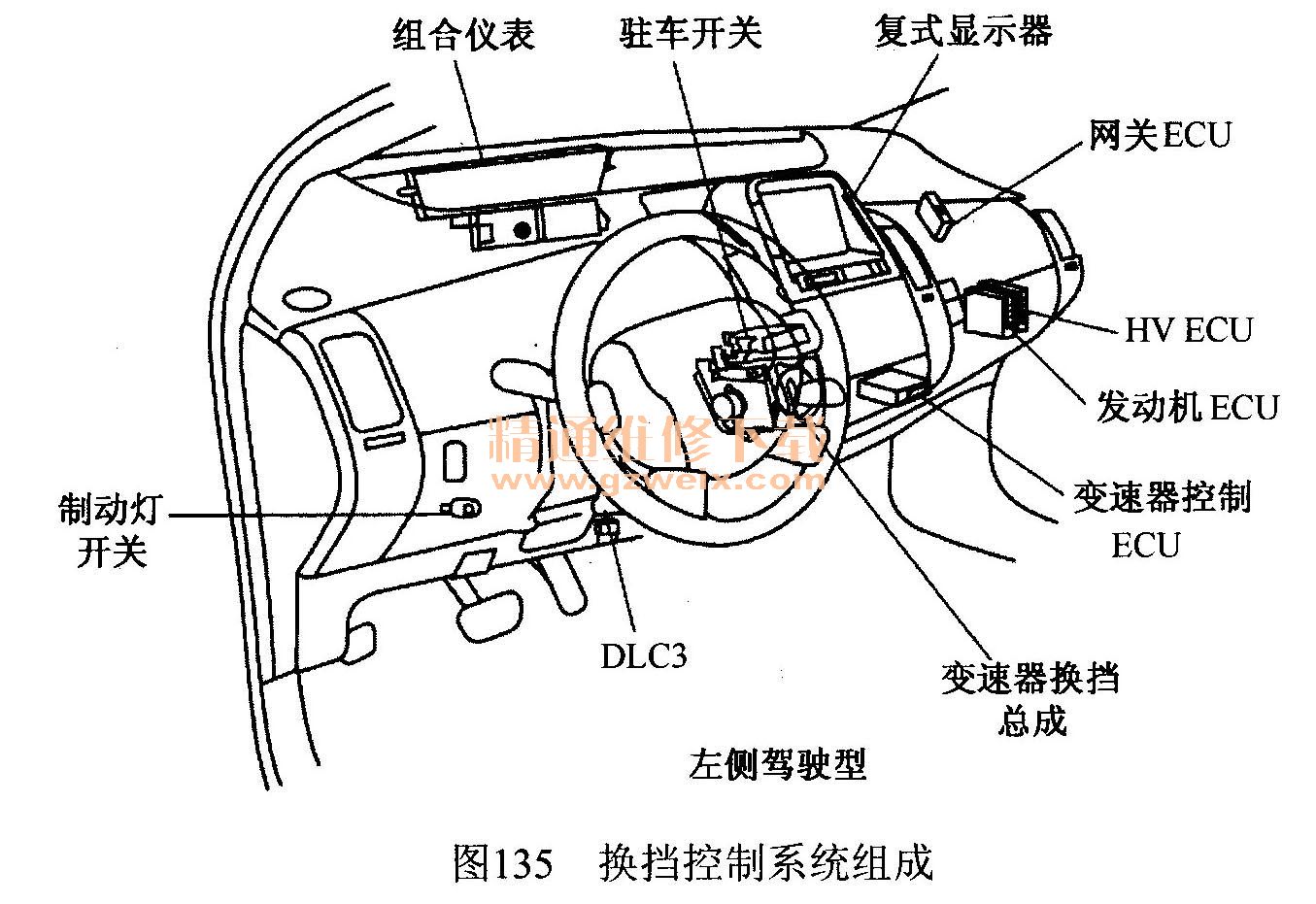
2)换档控制系统组成
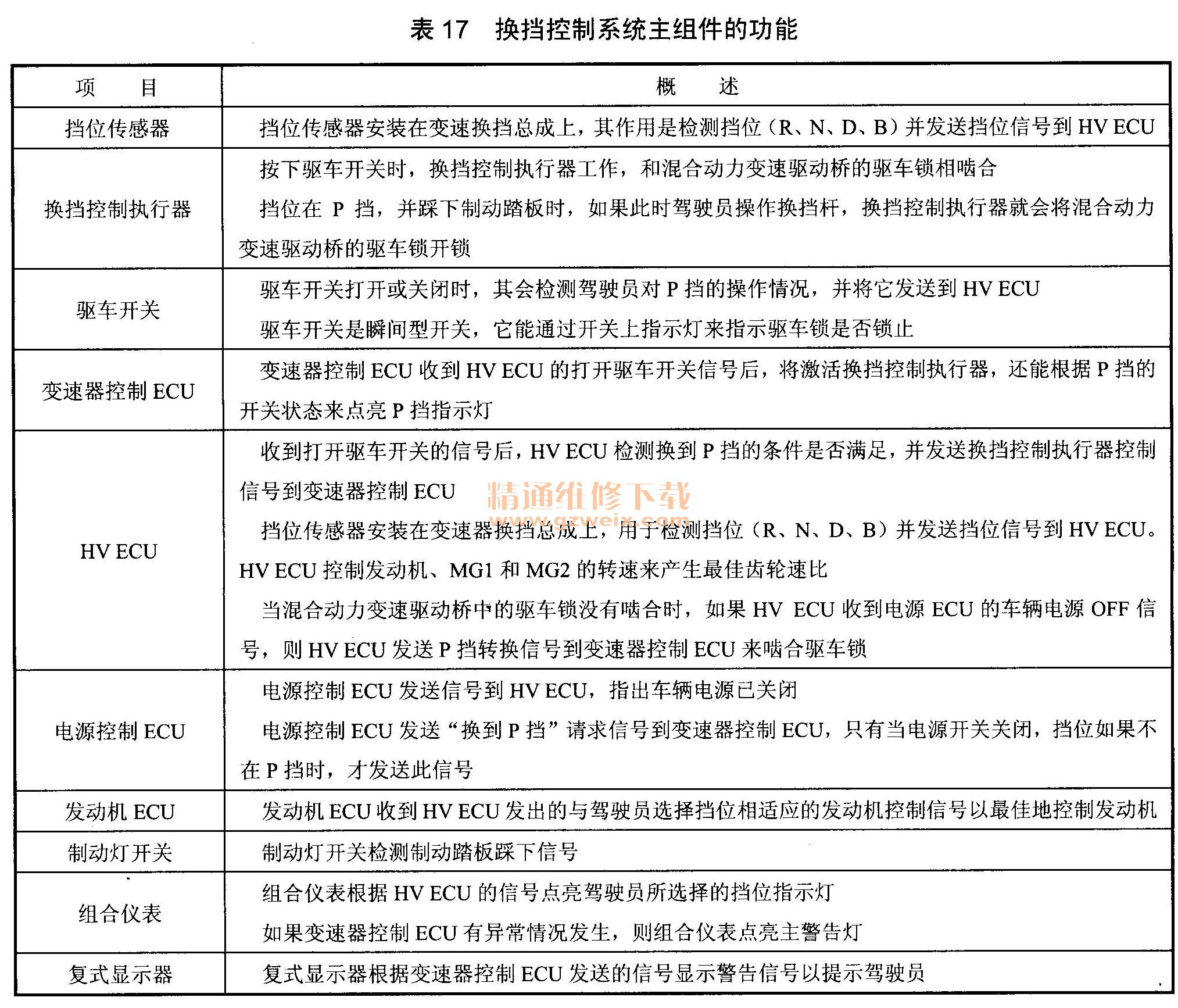
换挡控制系统组成如图135所示,其主组件的功能见表17。
3)换档系统主要部件
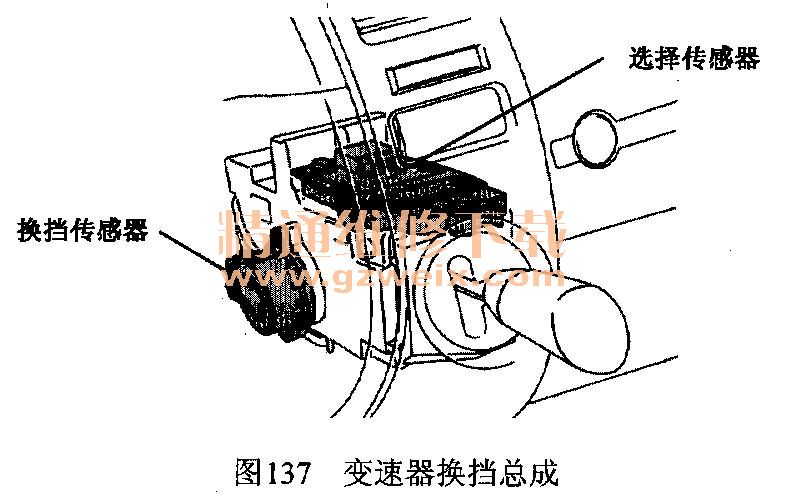
(1)变速器换挡总成。紧凑型选挡杆的设计运用全新的理念。当换挡操作后驾驶员的手离开选挡杆手柄时,手柄会在回位弹簧的作用下回到原位。变速器换挡总成内的挡位传感器(选择传感器和换挡传感器)检测挡拉(“R”、“N”、“D”和“B”)如图136、图137所示。打开尾灯时,变速器壳体中的灯泡就会间接地照亮挡杆手柄指示灯表面,以增强夜间的照明。

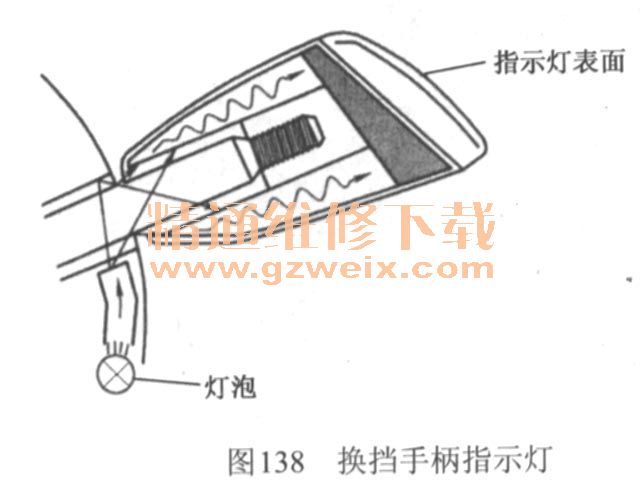
(2)换挡手柄指示灯如图138所示。换挡手柄指示灯的工作原理如下:当壳体内的灯泡点亮时,光束通过导光壳,反射到选挡杆柱面和光传输区域,从而在换挡手柄的下部照亮指示灯表面。
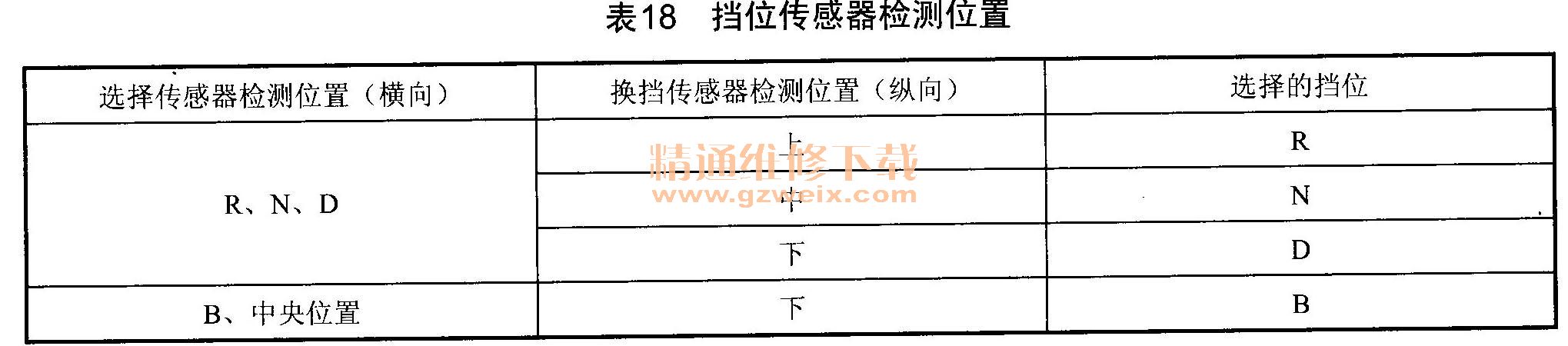
(3)挡位传感器如图139所示。挡位传感器包括一个用于检测换挡杆横向运动的选择传感器和一个用于检测换挡杆纵向运动的换挡传感器,这两个传感器信号的组合可以实现对具体挡位的检测,检测位置对应表见表18。

上一页 [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] 下一页





