・上一文章:宝马X5因总线故障导致空调不制冷
・下一文章:解析大众DSG传感器技术


2)判定车辆状态的方法
为了判定车辆状态,传感器检测转向角、车速、车辆偏移率和车辆的横向加速度,然后将这些值输入到制动防滑控制ECU进行计算。
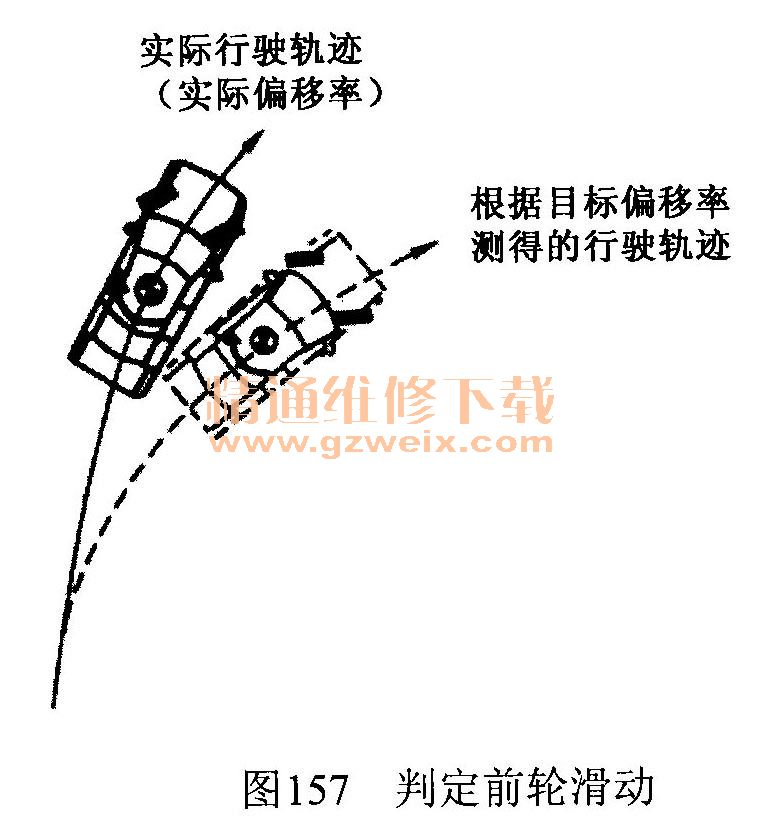
(1)判定前轮滑动。车辆前轮是否滑动是通过目标偏移率和实际偏移率的差判定的。当车辆的实际偏移率小于驾驶员操作方向盘时产生的偏移率(目标偏移率是通过车速和转向角来判定的)时,就说明车辆的转向角度大于行驶轨迹。这样,制动防滑控制ECU就判定前轮有很大的滑动趋势如图157所示。
(2)判定后轮滑动。通过车辆偏离角和偏离角速度(单位时间内偏离角的变化)的值可以判定车辆后轮是否滑动。车辆偏离角大时,偏离角速度也大,制动防滑控制ECU就判定车辆的后轮有很大的滑动趋势如图158所示。

3)增强型车辆稳定控制系统(VSC+)工作原理
当制动防滑控制ECU判定前轮或后轮出现滑动趋势时,系统就降低发动机的输出功率并在前后轮施加制动来控制车辆的偏移力矩。
VSC+的基本工作原理说明如下,控制方法根据车辆特性和行驶条件的不同而不同。
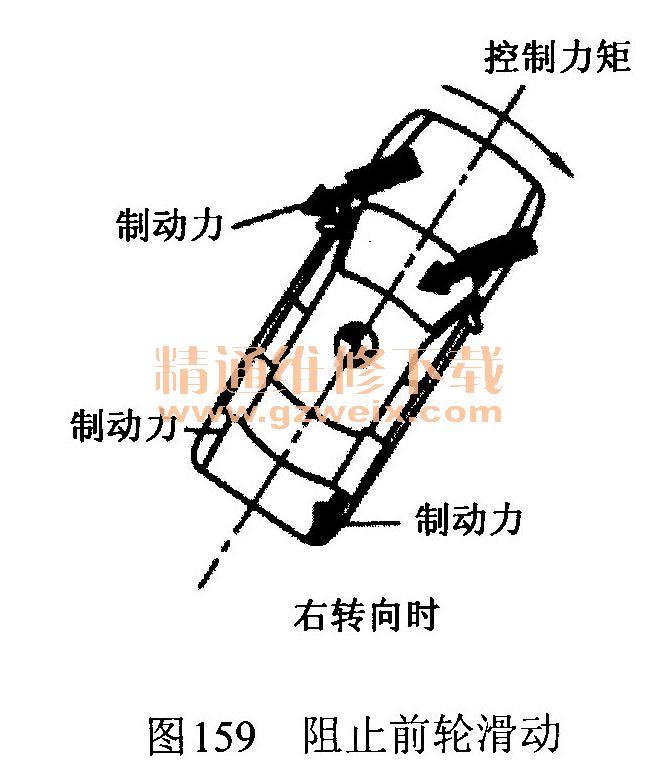
(1)阻止前轮滑动。制动防滑控制ECU判定前轮有很大的滑动趋势时,其会根据滑动趋势的大小来控制抵消滑动趋势如图1-159所示。转向时,制动防滑控制ECU控制发动机的功率输出并在外侧的轮和两个后轮上施加制动来抑制前轮的滑动趋势。
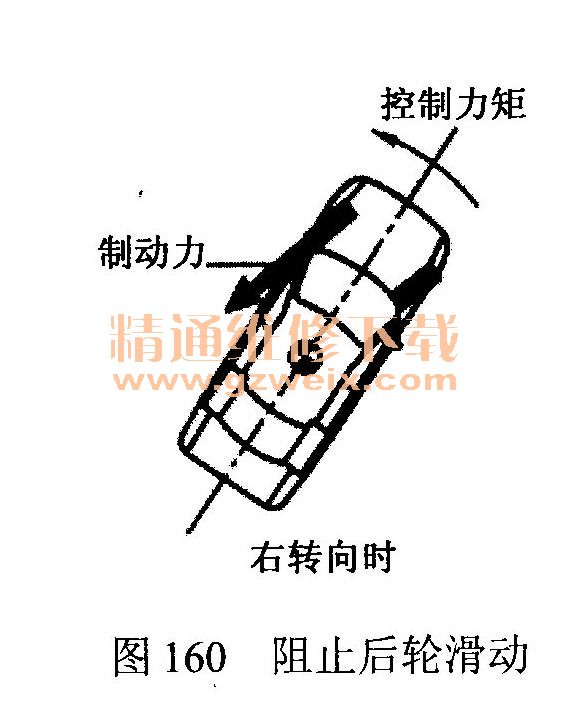
(2)阻止后轮滑动。制动防滑控制ECU判定后轮有很大的滑动趋势时,其会根据滑动趋势的大小来抵消滑动趋势。为了抑制后轮滑动趋势,它会给外侧前轮施加制动并产生向外侧的外向力矩如图160所示。除了由制动力降低了车速外,还可以提高车辆的稳定性。在有些情况下,制动防滑控制ECU在必要时也给后轮施加制动力。
4)和EPS的联合控制
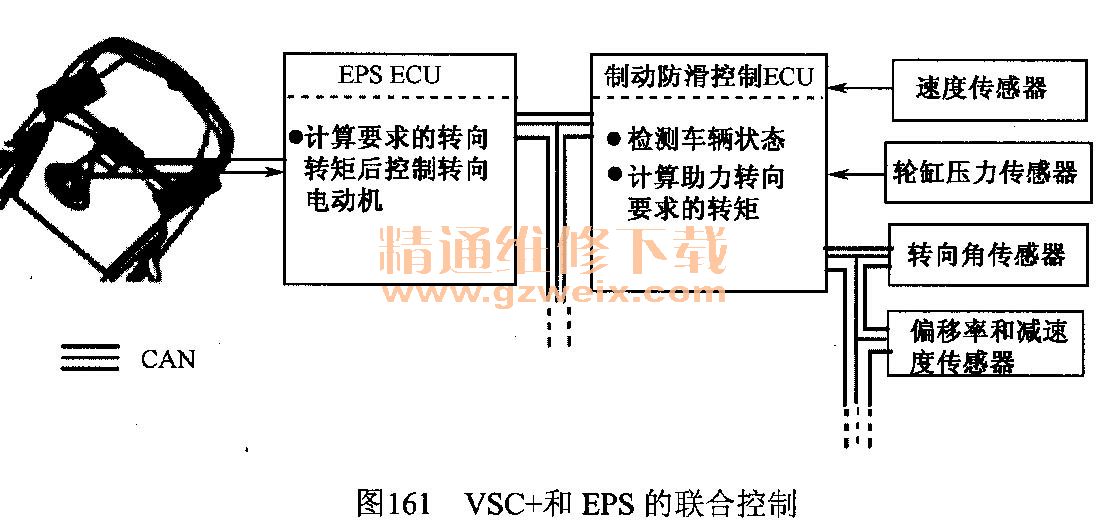
增强型车辆稳定控制系统(VSC+)除了一般的VSC控制功能外,还可以为驾驶员根据车辆状况进行的转向操作提供转向助力,这一功能是和EPS联合来完成的,如图161所示。
(1)车轮有滑动趋势时的操作。一旦后轮失去抓地力时,本系统会控制制动力和动力。同时,系统还控制转向转矩来帮助驾驶员转向;当出现前轮滑动的趋势时,如果驾驶员转动方向盘的力过大,就会使情况恶化,为了防止这种情况,VSC+提供转向转矩助力。
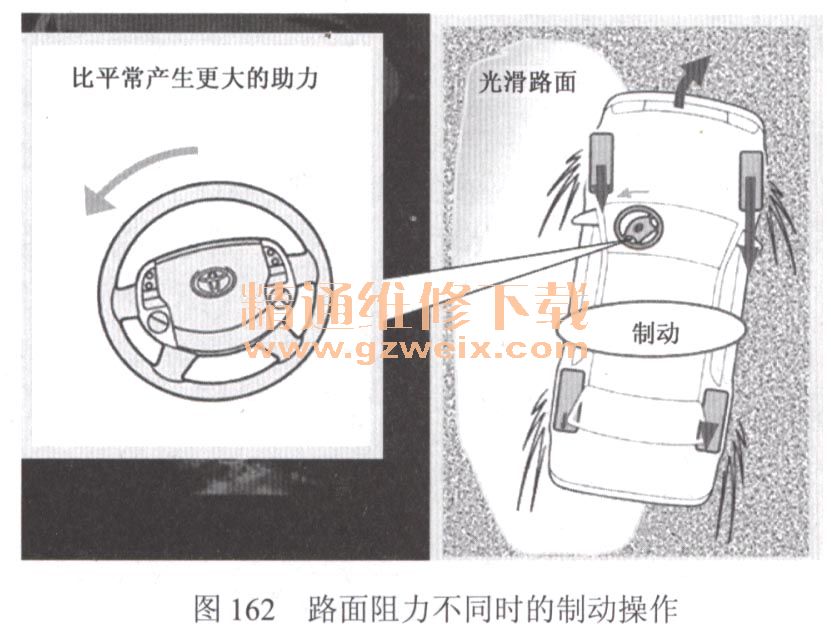
(2)两侧车轮所受路面阻力不同时的制动操作。车辆左右车轮所在的路面阻力不同而进行制动时,根据制动强度,左右车轮的制动力也不同,这会产生导致转向的偏移力矩。这种情况下,VSC+和EPS ECU一起进行联合控制,产生一个转向转矩助力来抵消已产生的力矩。这样操作EPS和VSC+增强了驾驶员转向效果,提高了车辆的稳定性,如图162所示。
上一页 [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] 下一页





