・上一文章:《汽车电气设备构造与维修》的信息化教学设计
・下一文章:宽轮辋中空铝合金车轮轴孔疏松缺陷的研究
3 系统标定及验证试验
系统标定流程,如图4所示。
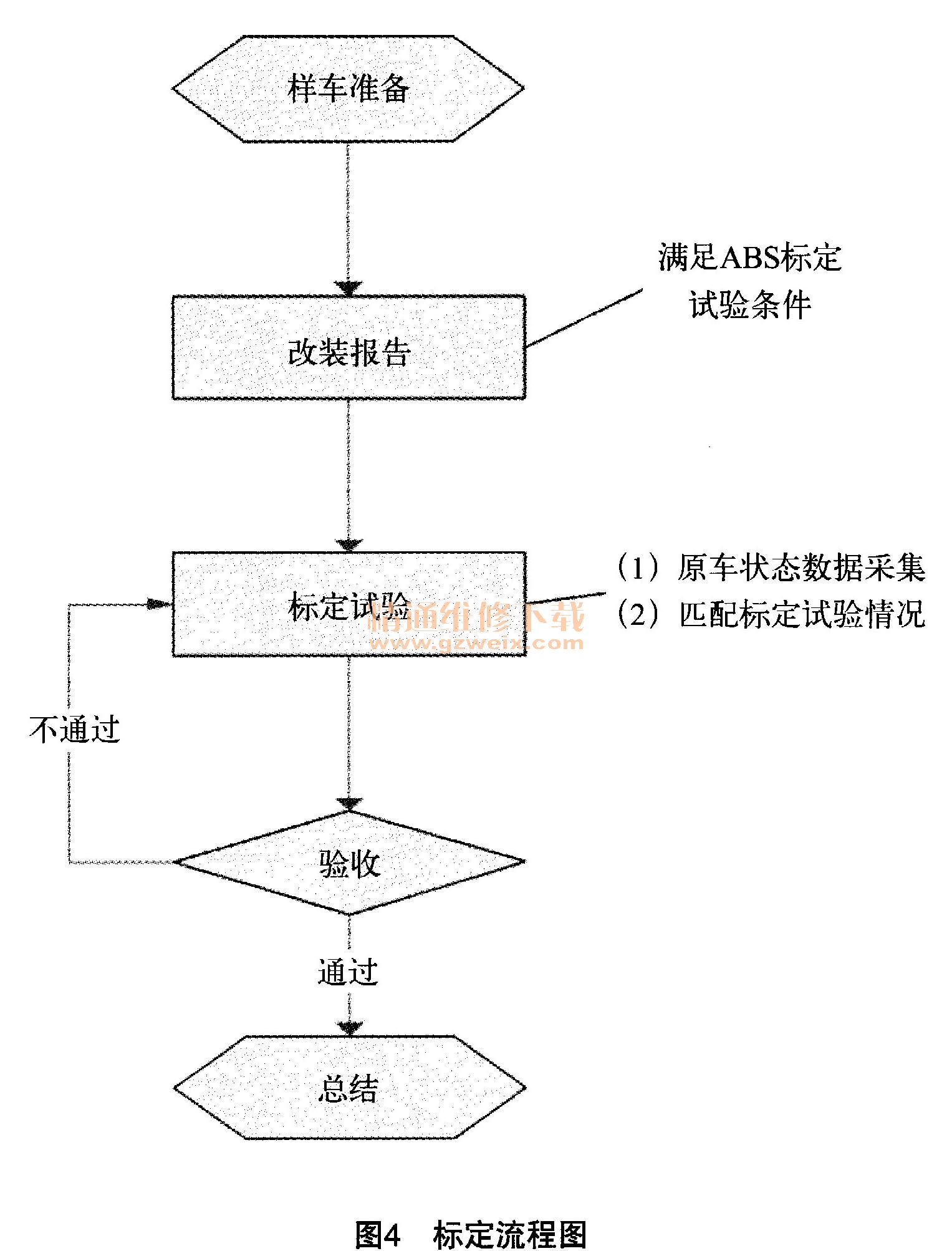
试验验证主要在试车场ABS道路进行试验,在研究国内外相关标准基础上,主要进行高附路面、低附路面,对接路面等多种路面状态,采用由低到高多个初速度状态、采用单前轮、单后轮及前后轮同时制动的三种操作状态进行组合试验,按照正常急制动要求进行制动同时采集各传感器数据,根据采集数据的解析和汇总结果分析其工作状态,根据软件控制功能修改参数,使在各种试验状态制动过程达到车轮不抱死的要求,同时记录采集数据。标定完成后固化控制程序,按照标准要求进行验证试验。
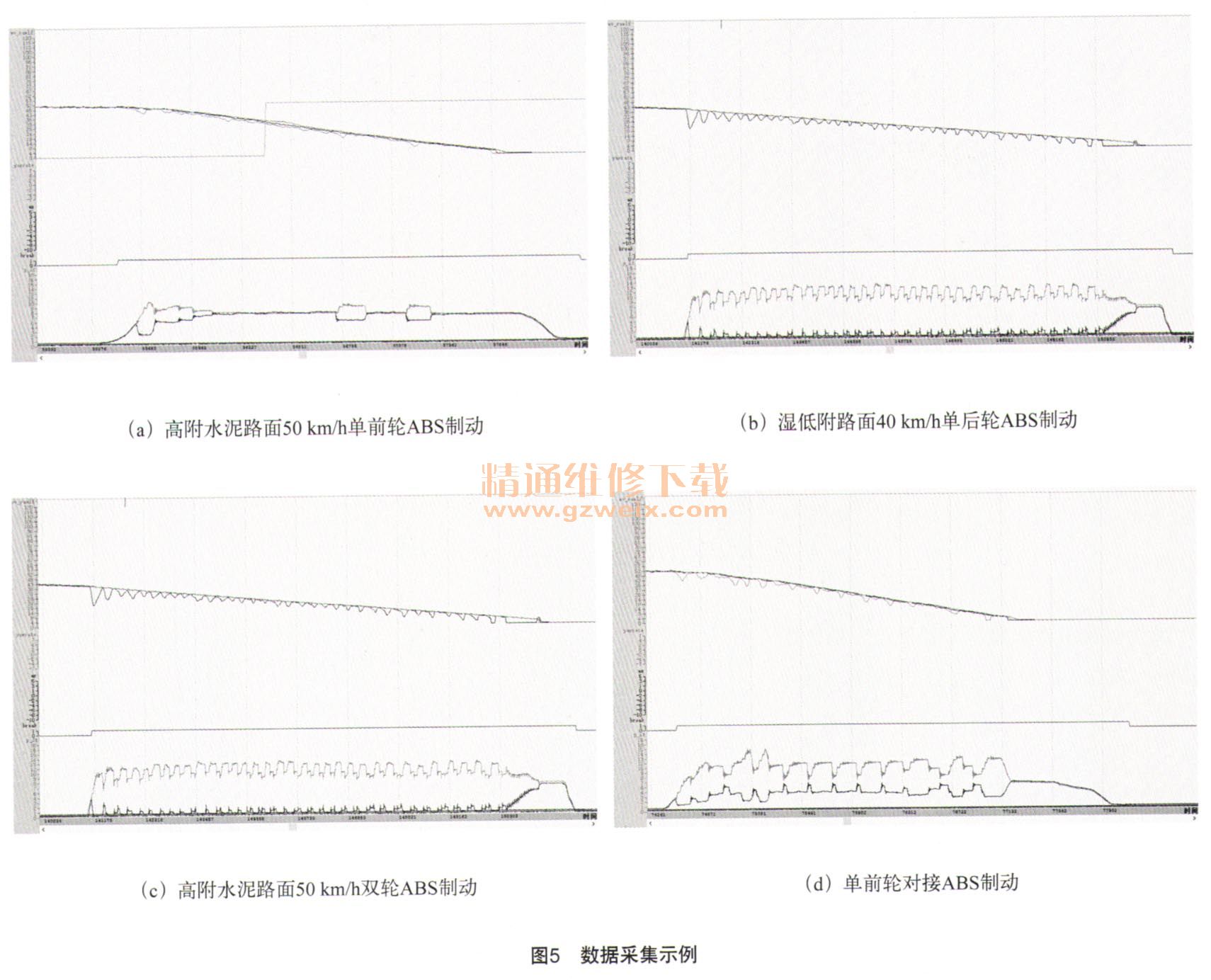
在试验过程中,采集了轮速、主缸压力、轮缸压力等参数,分析各参数之间相互关系,通过调整ECU控制参数,使得车辆的制动状态达到预期要求,如图5所示为该样车经过改装后反复进行规定的试验后对控制程序进行修改达到标准要求及预期效果的试验数据采集情况。
通过试验摩托车在高附路面上具有较高的制动减速度,初速度50 km/h单前轮制动时制动减速度为6.92m/s、,单后轮制动时制动减速度为3.28 m/s2,前后轮同时制动时制动减速度为8.17 m/s2。低附路面上制动状态明显改善,驾驶员能够较好的控制车辆制动时行驶方向。对接路面过程中,车辆保持稳定,车身无强烈横摆震动,不偏离试验跑道。试车场试验情况见下图6。
4 结论
本文主要对ABS制动防抱死系统的作用和工作机理进行了介绍,对摩托车ABS系统改装匹配方法、标定验证试验方法进行了论述,介绍了完成的某两轮摩托车的ABS匹配改装及测试的工作情况及改装后效果。对两轮骑式摩托车ABS制动防抱死系统匹配安装及系统标定试验过程进行了归纳和总结,对国内摩托车进行ABS制动防抱死系统的匹配改装和验证试验具有一定的借鉴作用。

")



