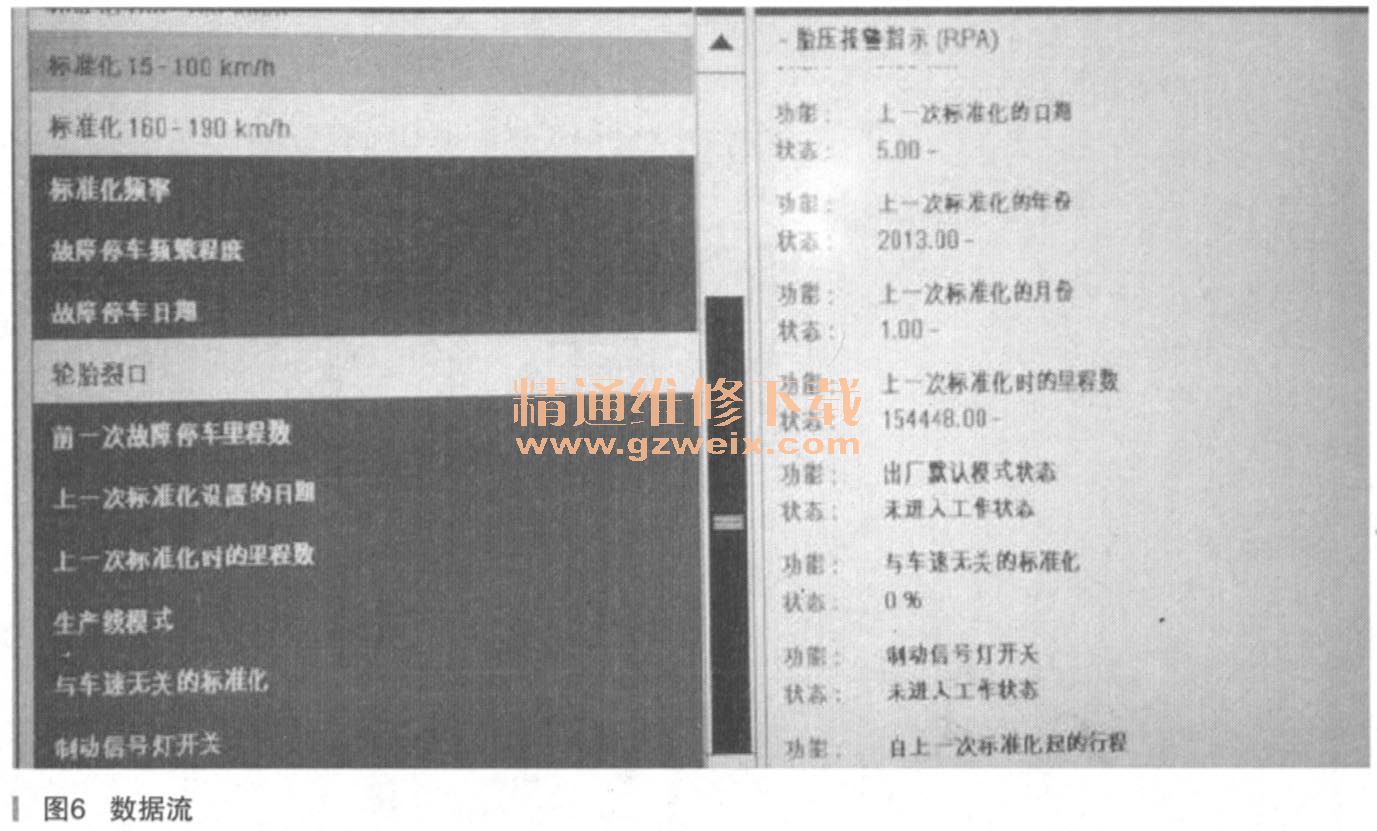
最后再从边上的事故车借用个EHC控制单元试用,并读取
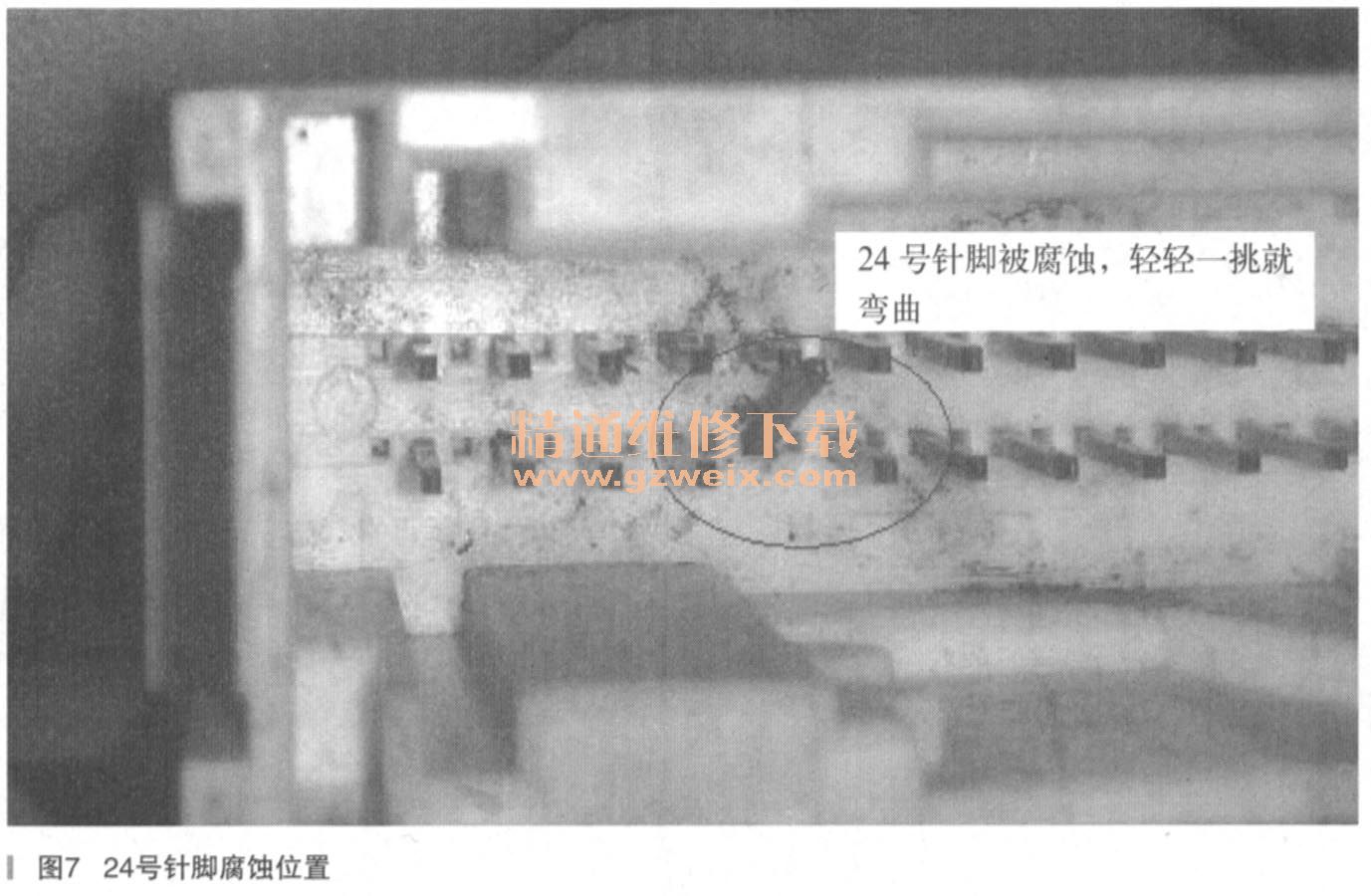
数据流(如图6所示),以上的日期与实际的一致,所以问题已解决,装上后试车正常,故障排除。到这里虽然问题已经找到,但是为什么两个EHC空气悬挂控制单元装好后会出现两个不同的结果?仔细比较一看(如图7所示),发现了不同。
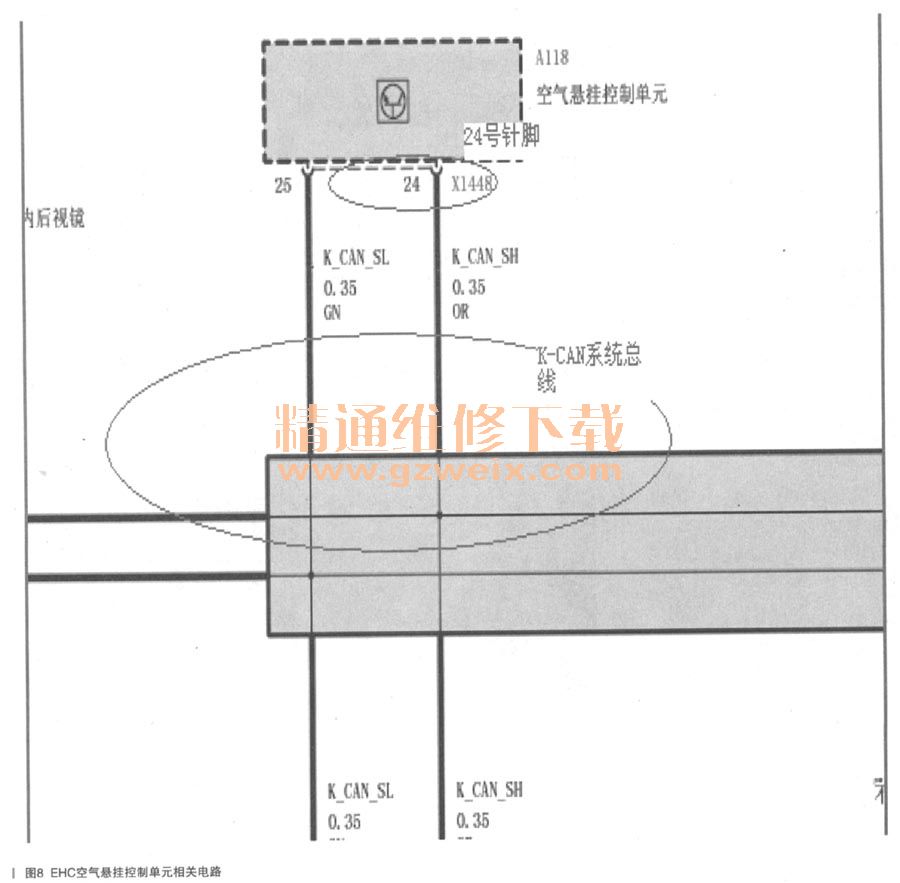
EHC空气悬挂控制单元与K-CAN系统总线相连的部分电路如图8所示。
CAN总线原理分析
CAN(控制器区域网络)总线系统是一种线形总线系统,并具有以下特征:
1.信号双向传播;
2.信息被所有用户接收,每个用户决定是否利用该信息;
3.通过简单的并联可添加新的用户;
4.总线系统是一个多主控单元结构;
5.每个用户可能是主控单元,也可能是副控制单元,就根据其作为发射器还是接收器被连接。
原则上每个用户可以通过总线同所有其他的用户联系。通过干预法,控制总线上的数据交换。K-CAN(车身CAN)数据总线和PT-CAN总线(传动系CA哟的主要区别是:
1.K-CAN:传输率约为100 kBits/s。可以进行单线运行。
2. PT-CAN:传输率约为500 kBits/s。不可以进行单线运行。
主控制单元:主控单元是主动式通信方,通信的主动权由它发出。主控单元控制总线和通信。它能够在总线网络中向被动式用户(副控制单元)发送信息,并根据被动式用户的要求接收信息。
副控制单元:副控制单元是一个被动式通信用户,它被要求接收和发送数据。
多主控单元系统:在一个多主控单元系统中所有的通信用户,在某个时间里都能够担当主控单元或副控制单元的角色。
在每个控制单元中都有各自的一个总线端。这意味着,一旦断路,电平可能在整个K-CAN网络上保持。这会导致发送控制单元不能识别该故障,并继续在双线模式下工作。但如果控制单元越过中断位传送一条信息,则接收控制单元仅在未损坏的总线导线上确定活性。接收控制单元将由此识别出单线运行状态,并存储下故障“CAN线路故障”。如果不同的控制单元通过接收到除中段位以外的信息,则会有多个控制单元在单线运行状态下输入该故障代码存储内容。
因此,EHC空气悬挂控制单元与K-CAN系统总线相连的第24号针脚被腐蚀造成接触不良,造成K-CAN系统通信故障,导致胎压报警系统故障。
故随排除:更换EHC控制单元,全车编程。
故障总结:每当我在无法从诊断仪里读取到相关的故障代码时,都会静下心来,先去弄清工作原理以及相关的电路图,认真仔细分析,展开维修思路,诊断的效率就提高了。
上一页 [1] [2]





