・上一文章:分析及检修赛欧C16NE 发动机电控燃油喷射系统故障(一)
・下一文章:奔驰S350行驶时右前轮一声巨响
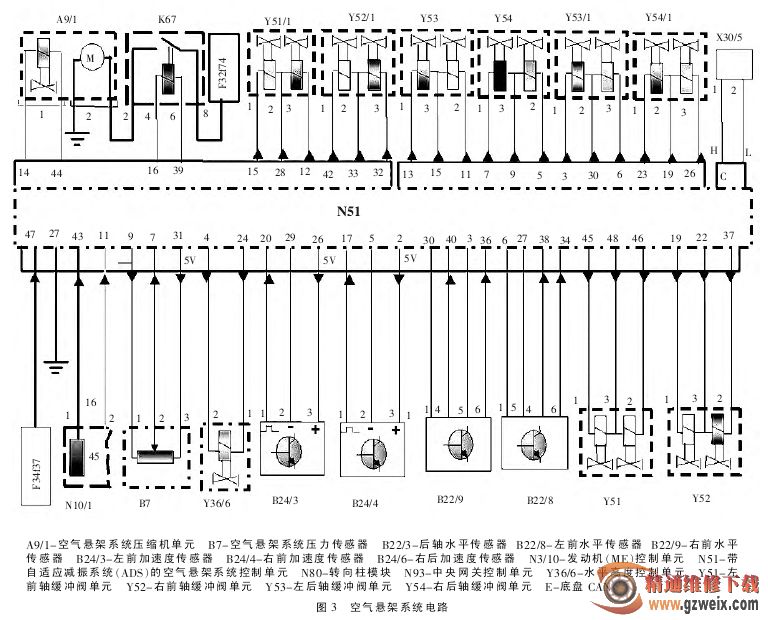
四、电路图及控制机理
空气悬架系统电路如图3所示。
1.自适应减振系统控制机理
自适应减振系统是空气悬架纯水平高度控制和自动减振调节缓冲阀上的2个电磁阀的结合体,该系统按照一种控制运算法则工作,根据驾驶状况建立适当的减振级,通过主控制单元对加速度信号、水平位置信号、系统压力进行采集,以及一些开关量,如车身升高开关、模式开关等,通过底盘CAN 传给主控制单元,经运算处理后,发送指令给各带 ADS的控制单元,以实现对阻尼力的控制,提高车辆的稳定性和乘坐舒适性。当自适应减振系统控制模块检测到故障,相应的故障信息会通过底盘CAN 传送到中央网关,然后通过内部CAN 传送到多功能仪表上显示。
2.自动水平高度调节和车身水平高度控制机理
1)自动水平高度调节
N51 根据车身加速度传感器信号、车身水平位置信号、系统压力、C-M-S 模式开关状态等信号量,通过CAN 总线传送给主控制单元,经过运算处理后,发送指令给水平控制单元,经分配阀分配后,控制各减振器的空气弹簧,实现自动调节车身高度,其控制逻辑为:
“高位”模式———车速高于 80km/h持续 3min,下降到 0 位;车速达到120km/h,立即下降到 0 位。
“运动”模式———车速在 100km/h时,下降 20mm;车速在 60km/h 时,升高到 0 位。
“舒适”模式———车速在 120km/h时,下降 10mm;车速在 160km/h 时,下降20mm。
如 果车身高度太 低 ,超过 极 限 ,则会通过声音和文字信息在仪表上报警。
具 体控制原理为:由空气泵单元提供压缩空气,通过水平控制单元中把压缩空气分配到各减振器上。水平控制单元中还集成了压力传感器和泄压阀,空气泵单元与中央储气罐相连(目的是提高控制的灵敏度),通过管子连接到各减振器总成上,从而实现水平高度的自动调节。其中,空气泵单元的供电由前SAM(代号 N10/1,带保险丝和继电器模块的促发控制单元)提供,主控制单元控制空气泵的继电器,实现电流的通/断,经保险丝到空气泵。
2)车身水平高度控制
此功能可以由驾驶员手动控制车辆水平高度,以应对复杂路况的需要,由驾驶室开关组、下控制面板、内部CAN、中央网关、底盘 CAN 等组成。
具体控制原理为:按下车辆上升开关,位于下控制面板的 LED 灯点亮,通过 LIN 总线(控制器局域网络,传输速率低,为单线工作模式)传到下控制面板,再通过内部 CAN 传到中央网关,最后通过底盘CAN 传到主控制单元,实现车辆上升的控制;当达到需要的高度后,再次按下此开关,关闭上升功能。





