・上一文章:空燃比修正指数在汽车故障诊断中的应用
・下一文章:丰田RAV4安全气囊灯常亮
1 助力转向控制单元(J500)
J500根据V187转子位置和转向力矩信号确定V187相电压的状态模型,由此设定的相电流使V187产生不同的力矩,这些匹配关系储存句500内,J500通过FIexRay总线与其他控制单元进行通信。J500外部导线连接器接口(图5)分别为G269接口、15号供电及FIexRay总线接口、30号供电及31号搭铁接口。

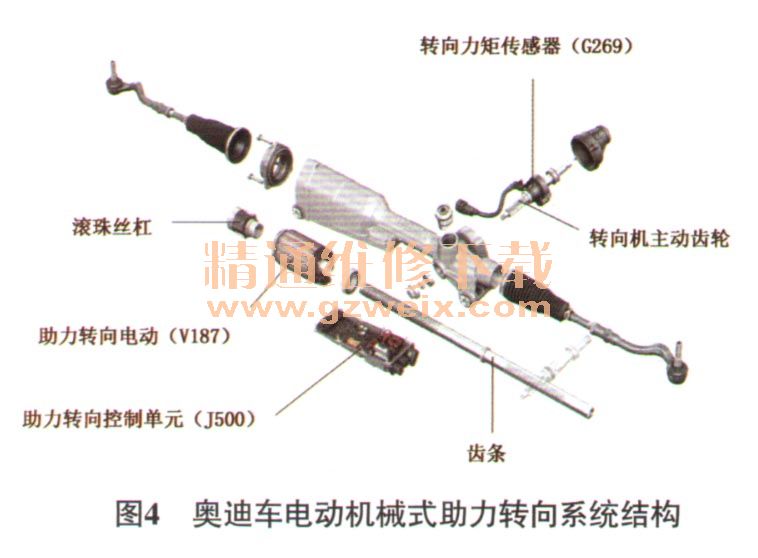
2 助力转向电动机(V187)
V187负责产生转向助力所需的力矩,是一个永久励磁式三相交流同步电动机(图6),其体积小、功率大。V187上带有转子位置传感器,用于检测转子的位置,以J500计算定子磁场所需的相电压,另外,转子位置传感器的测量值还可以用于确定转向止点。

3 滚珠丝杠
滚珠丝杠是将V187的旋转运动转换为齿条的直线运动。如图7所示,滚珠丝杠类似于普通的螺检与螺母系统,齿条相当于螺检,沟道相当于螺距,齿条和球循环螺母通过沟道中的球连接:)球循环螺母与转子空心轴刚性连接在一起,V187激活时转子空心轴带动球循环螺母旋转,由于球循环螺母无法左右移动,其内部的球带动齿条左右直线运动。为了限制这些球相互之间接触,球的循环通道越短越好,因此在球循环螺母中采用了2条分开的循环通道。

4 转向力矩传感器(G269)
要想计算所需转向助力力矩大小,其基础信息就是驾驶人所施加的转向力矩大小。转向主动齿轮与转向轴通过扭力杆连接,这与带有转向阀的普通液压转向机构结构一样。如果驾驶人转动了转向盘,那么扭力杆和转向轴相对于转向主动齿轮就发生扭转。扭转的程度取决于驾驶人说施加的转向力矩的大小,G269可以测量出该扭转程度的大小。
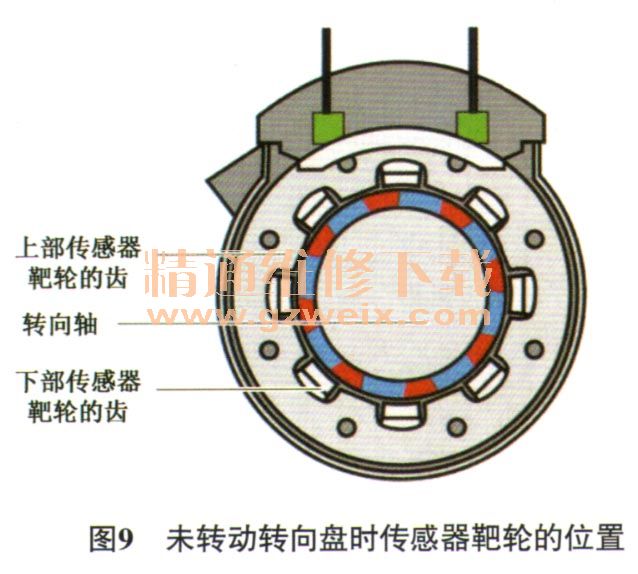
如图8所示,G269中有2个霍尔传感器,其上下各有1个传感器靶轮,传感器靶轮与转向主动齿轮刚性连接;传感器靶轮上各有8个齿,2个传感器靶轮的齿错开布置,即沿着转向轴方向向下看,上部传感器靶轮的齿处于下部传感器靶轮的齿隙中;传感器靶轮中部有8对环形磁铁,环形磁铁与转向轴刚性连接。

如图9所示,如果没有转动转向盘,每个传感器靶轮上的齿都在环形磁铁N极与S极的正中位置,因此这2个传感器靶轮被磁力线所穿过的方式是一样的,2个传感器靶轮之间没有磁场,2个传感器输出信号相同;如果转动转向盘,环形磁铁与传感器靶轮之间产生相对运动,传感器靶轮上的齿离开环形磁铁N极与S极的正中位置,此时一个传感器靶轮上的齿按比例会靠近环形磁铁N极一些,而另一个传感器靶轮上的齿会靠近环形磁铁S极一些,这使磁路发生失调,产生的磁通量被霍尔传感器测量到。