・上一文章:2016年亚太沃尔沃S60L(1.5T B4154T4)发动机正时校对方法
・下一文章:CB125T双缸摩托车右曲轴箱盖内有异常声响
3.3.1车架3D可设计域建模
以某型二轮电动车车架开发目标为例,,采用SOLIDWORKS建立开发车架3D可设计域,并导入ANSYS WOKBENCH,划分网格,完成有限元模型初始设定。如图4和图5所示。


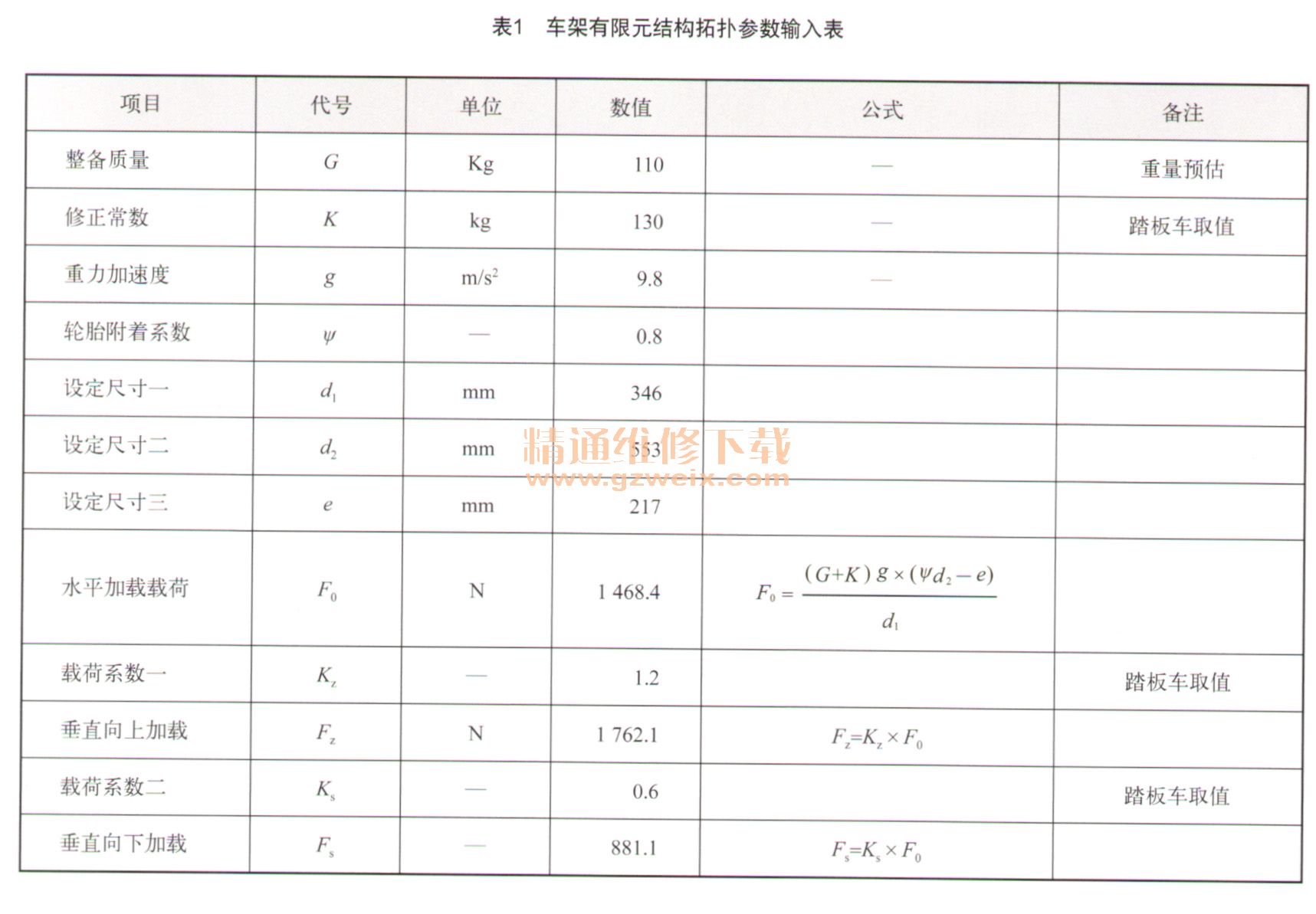
3.3.2有限元拓扑结构计算输入
根据3.2中关于车架结构承载有限元计算模型工况描述,以某型二轮电动车车架开发为例,确立有限元拓扑结构计算工况输入,如表1所示。
3.3.3有限元拓扑结构计算工况
根据3.2中关于车架结构承载有限元计算模型工况描述,车架有限元拓扑结构计算工况分为三个工况,其一,水平载荷往复工况,其载荷及约束条件如图6所示,图中,A、B利用Point Mass对前轮轴和后轮轴进行轮轴区域刚性化;C点利用Remote Displacement约束后轮轴轴心,释放绕轴转动约束,其它五个自由度全约束;D点利用Remote Displacement约束前轮轴轴心,释放车架纵向位移,其余五个自由度全约束;E利用Remote Force在前轮轴中心增加水平载荷,载荷为3.3.2中计算值F0。其二,垂直向卜载荷工况,其载荷及约束条件如图7,图中,A、B利用Point Mass对前轮轴和后轮轴进行轮轴区域刚性化;D点利用Remote Displacement约束前轮轴轴心,释放车架纵向位移,其余五个白由度全约束;G利用Remote Force在后轮轴中心增加垂直向上载荷,载荷为3.3.2中计算值Fz,H点利用Remote Displacement约束设计基准,释放绕轴转动约束,其它五个自由度全约束。其三,垂直向下载荷工况,其载荷及约束条件如图8,图中,A、B 利用Point Mass对前轮轴和后轮轴进行轮轴区域刚性化;c点利用Remote Displacement约束前轮轴轴心,释放车架纵向位移,其余五个自由度全约束;E点利用Remote Displacement约束设计基准,释放绕轴转动约束,其它五个自由度全约束;F利用Remote Force在后乘员坐姿点增加垂直向下载荷,载荷为3.3.2中计算值Fs。




")



