・上一文章:奥迪A6L轿车无法入档
・下一文章:玉米收获机过桥主传动轴断轴原因失效分析
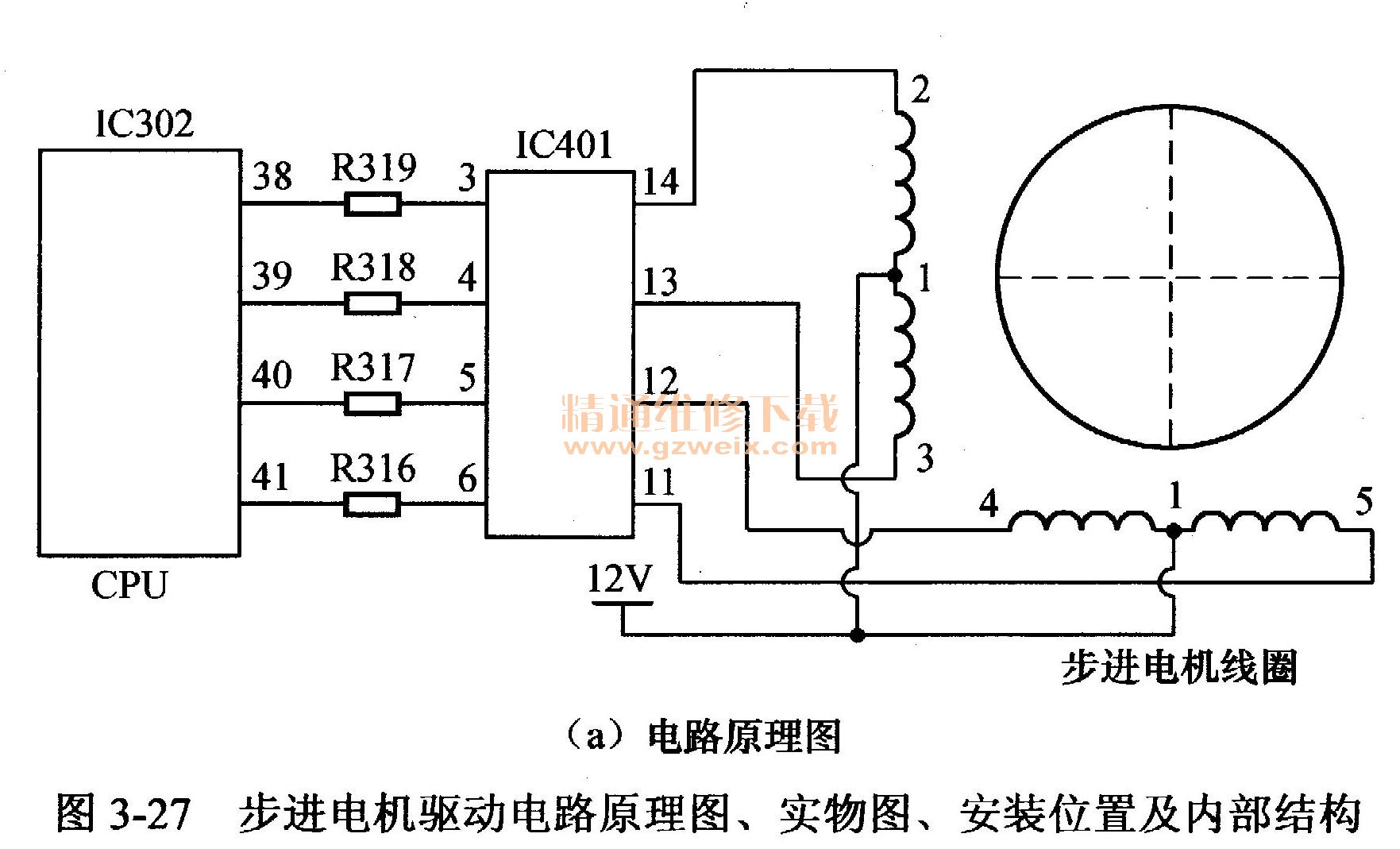
三、步进电机驱动电路
图3-27(a)所示为KFR-2601 GWBP步进电机驱动电路原理图,图3-27(b)所示为实物图,图3-27(c)所示为安装位置,图3-27(d)所示为内部结构,表3-20为CPU引脚电压与步进电机状态对应关系。


1.工作原理
需要控制步进电机运行时,CPU38、39、40、41脚输出驱动信号,经限流电阻至反相驱动器IC401的输入端③、④、⑤、⑥脚,IC401将信号放大后在14、13、12、11脚反相输出,驱动步进电机线圈,电机转动、带动导风板上下摆动,使房间内送风均匀,并到达用户需要的地方;需要控制步进电机停止转动时,CPU38、39、40、41脚输出低电平0v,线圈无驱动电压,使得步进电机停止运行。
驱动步进电机运行时,CPU的4个引脚按顺序输出高电平,实测电压在1.3V左右变化;同理,反相驱动器输入端电压在0.7V左右变化,输出端电压在8.5V左右变化。
2.电路相关知识
制冷时吹出空气潮湿,于是自然下沉,使用时应将导风板角度设置为水平,应避免直吹人体;制热时吹出空气干燥,于是自然向上漂移,使用时将导风板角度设置为向下,这样可以使房间内送风合理且均匀。
3.步进电机测量方法
英文“FLAP”是步进电机在主板上的插座代号,线圈工作电压为直流12V。使用万用表电阻挡测量5根引线之间的阻值,结果见表3-21。
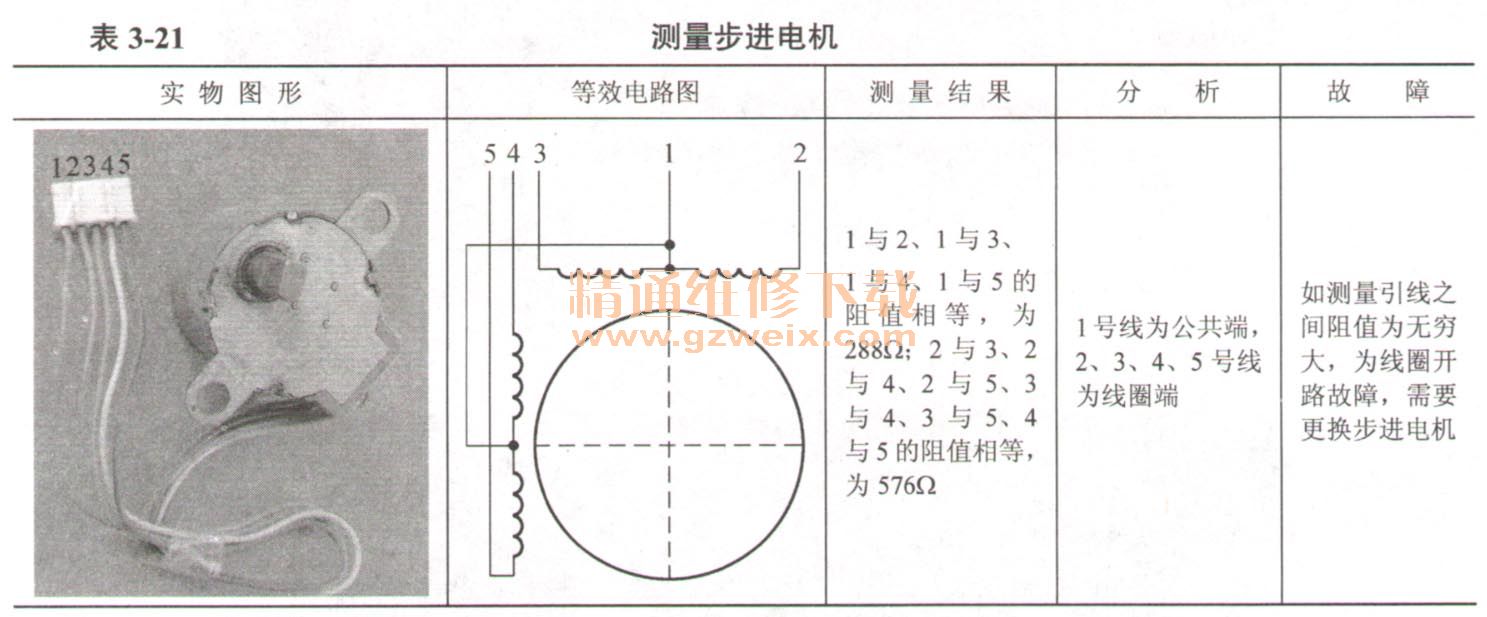
说明:在实际电路中,1号线接直流12V电压,2、3、4、5号线接反相驱动器;不同厂家步进电机测量的阻值可能不相同,但只要符合规律即可。
4.常见故障
步进电机驱动电路的常见故障见表3-22。

四、主控继电器驱动电路
图3-28(a)所示为KFR-2601 GWBP主控继电器驱动电路原理图,图3-28(b)所示为继电器触点吸合过程,图3-28(c)所示为继电器触点断开过程,表3-23为CPU引脚电压与继电器触点状态的对应关系。

1.工作原理
主控继电器为室外机供电,CPU25脚为控制引脚。当CPU处理输入的信号,需要为室外机供电时,25脚为高电平3.5V,该电压信号经限流电阻R314送至反相驱动器IC401的输入端①脚,电压为约2V高电平,内部电路翻转,输出端引脚接地,其对应输出端16脚为低电平0.8V,继电器RL401线圈得到直流11.2V供电,产生电磁力使触点3-4闭合,电源电压由L端经主控继电器3-4触点去接线端子,与N端组合为交流220V电压,为室外机供电。
当CPU处理输入的信号,需要断开室外机供电时,25脚为低电平0V、IC401输入端①脚也为低电平0V,内部电路不能翻转,对应CPU输出端16脚为高电平12V,继电器RL401线圈电压为直流0V,触点3~4断开,停止室外机的供电。
2.电路相关知识
为室外机供电时,接线端子N为公共端,供电电压由电源插头的N端直接供给室外机;电源L端供电需要经过室内机主板主控继电器触点。由于电源插头L端供电直接连接主控继电器,并没有经过室内机主板的保险管,因此室外机强电出现短路故障时,不会烧坏保险管,表现为空气开关跳闸。
3.关键元器件
图3-29(a)所示为继电器实物外观,图3-29(b)所示为线圈引脚作用。


本电路关键元器件为继电器,在电路中的英文符号通常为“RY”或“RL”;外观为黑色的长方体,一侧为触点端,连接强电负载,一侧为线圈端,连接驱动电路;它是一种用较小的电流控制大功率负载的“自动开关”,工作时线圈得电产生电磁吸力,使触点闭合,控制负载运行。
继电器的两个主要参数为线圈工作电压和触点电流,线圈一般为直流12V供电,触点电流即触点吸合时所能通过的最大电流,负载不同,工作电流也不同,因而在电路中选用不同的继电器控制不同的负载。
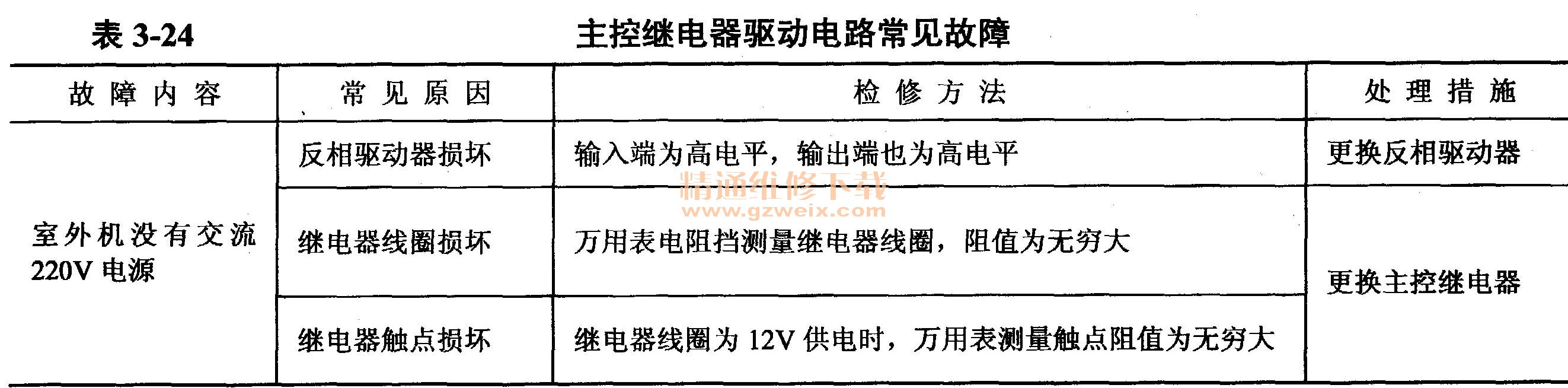
4.常见故障
主控继电器驱动电路常见故障见表3-24。
上一页 [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] 下一页





