・上一文章:奥迪A6L轿车无法入档
・下一文章:玉米收获机过桥主传动轴断轴原因失效分析
第三节 室内机单元电路
海信KFR-26GW/11BP室内机主板单元电路和海信KFR-2601GW/BP相比,输入部分的过零检测电路、传感器电路及输出部分的指示灯电路有比较大的差别,本节作重点介绍;而其他单元电路基本相同,本节只是简单介绍其工作原理,相关知识参见第3章内容,相同之处不再一一赘述。
另外,遥控器两者通用,工作原理也相同,本节不再叙述,相关知识参见第3章第6节内容。
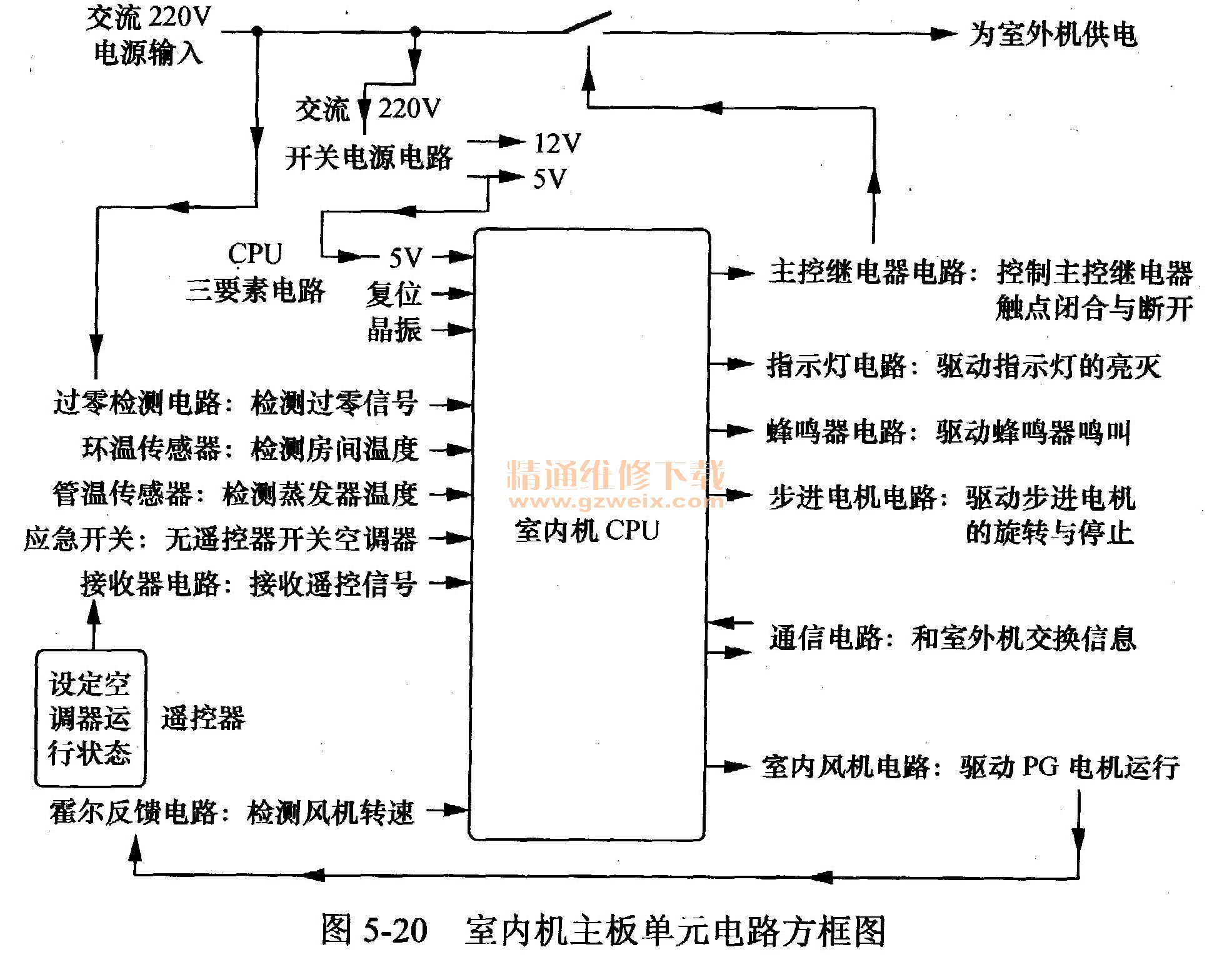
一、室内机单元电路方框图
图5-20所示为室内机主板单元电路方框图,图中左侧为输入部分电路,右侧为输出部分电路。
二、输入部分电路
1.应急开关电路
图5-21(a)所示为海信KFR 26GW/11BP应急开关电路原理图,图5-21(b)所示为实物图。
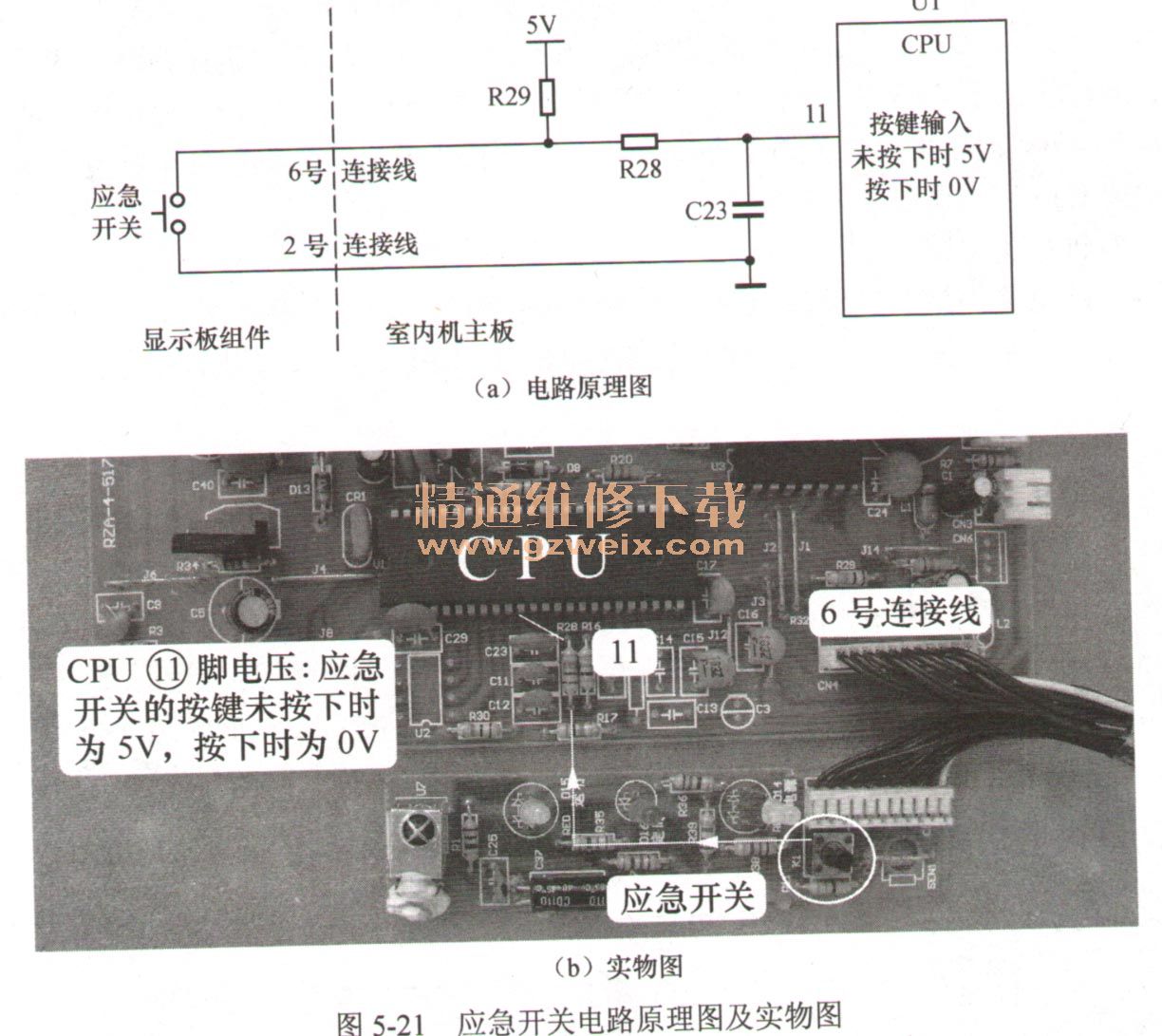
该电路的作用是无遥控器可以开启和关闭空调器。CPU11脚为应急开关信号输入引脚,正常即应急开关未按下时为高电平直流5V;在无遥控器需要开启或关闭空调器时,按下应急开关的按键,11脚为低电平0V、CPU根据低电平时间长短进入各种控制程序。
该电路的关键元器件、常见故障等相关知识参见第3章第3节的第一部分内容。
2.遥控信号接收电路
图5-22(a)所示为海信KFR-26GW/ 11 BP遥控信号接收电路原理图,图5-22(b)所示为实物图。

(1)工作原理
该电路的作用是处理遥控器发送的信号并送至CPU相关引脚。遥控器发射含有经过编码的调制信号,以38kHz为载波频率发送至接收器,接收器将光信号转换为电信号,并进行放大、滤波、整形,经电阻R11及R16送至CPU12脚,CPU内部电路解码后得出遥控器的按键信息,从而对电路进行控制;CPU每接收到遥控信号后会控制蜂鸣器响一声给予提示。
该电路的关键元器件、测量接收器方法、常见故障等相关知识参见第3章第3节的第二部分内容。
(2)早期和目前的接收器在出厂时的不同之处
图5-23所示为早期和目前空调器中的接收器的引脚区别。
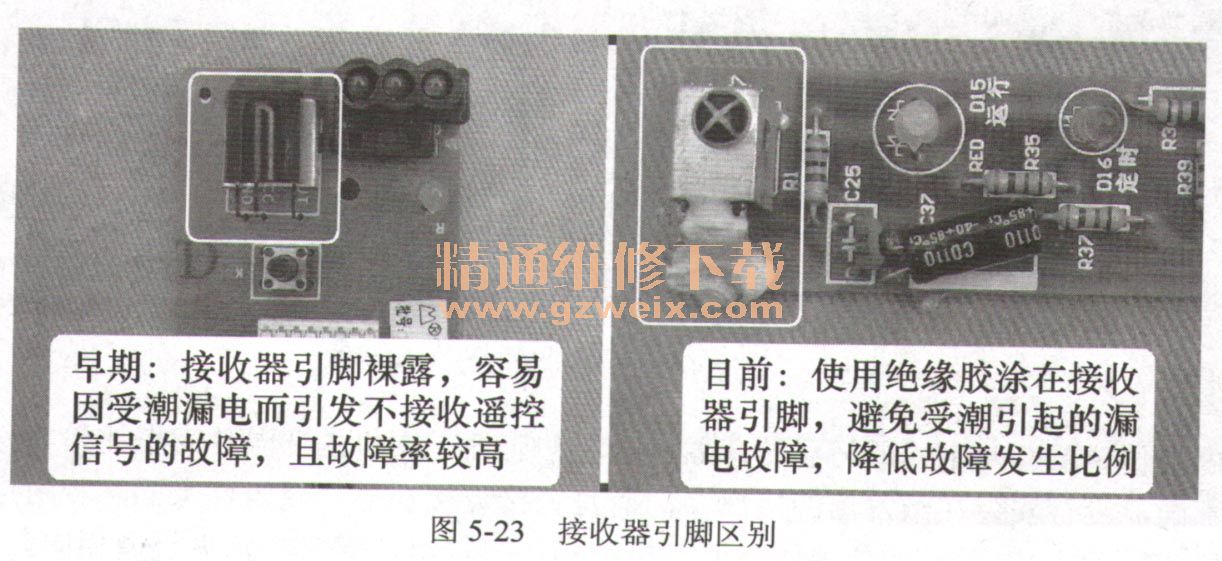
早期大多数品牌空调器室内机显示板组件上的接收器引脚裸露在外,容易因受潮引起接收器漏电,出现不能接收遥控信号的故障,并且这是一种通病,无论是变频空调器或定频空调器,在绝大部分空调器品牌中均会出现。
实际上门检修时,一般不用更换接收器,使用电吹风加热接收器,或使用螺丝刀轻轻敲击接收器表面,即可排除故障。但这是一种治标不治本的方法,空调器使用一段时间之后还会再次出现相同的故障,根治的方法就是在更换质量好的接收器后,在引脚表面涂上一层绝缘胶。目前出厂的大多数品牌空调器,接收器引脚均涂有绝缘胶,以降低不接收遥控信号故障的比例。
3.传感器电路
(1)安装位置
图5-24所示为环温传感器安装位置及实物外观,图5-25所示为管温传感器安装位置及实物外观。


室内机传感器有两个,即环温传感器和管温传感器。本机的环温传感器比较特殊,与常见机型不同,没有安装在蒸发器的进风面,而是直接焊接在显示板组件上面(相对应主板没有环温传感器插座),且实物外观同普通二极管相似;管温传感器与常见机型相同。
(2)工作原理
图5-26所示为海信KFR-26GW/11BP传感器电路原理图,图5-27所示为管温传感器信号流程。
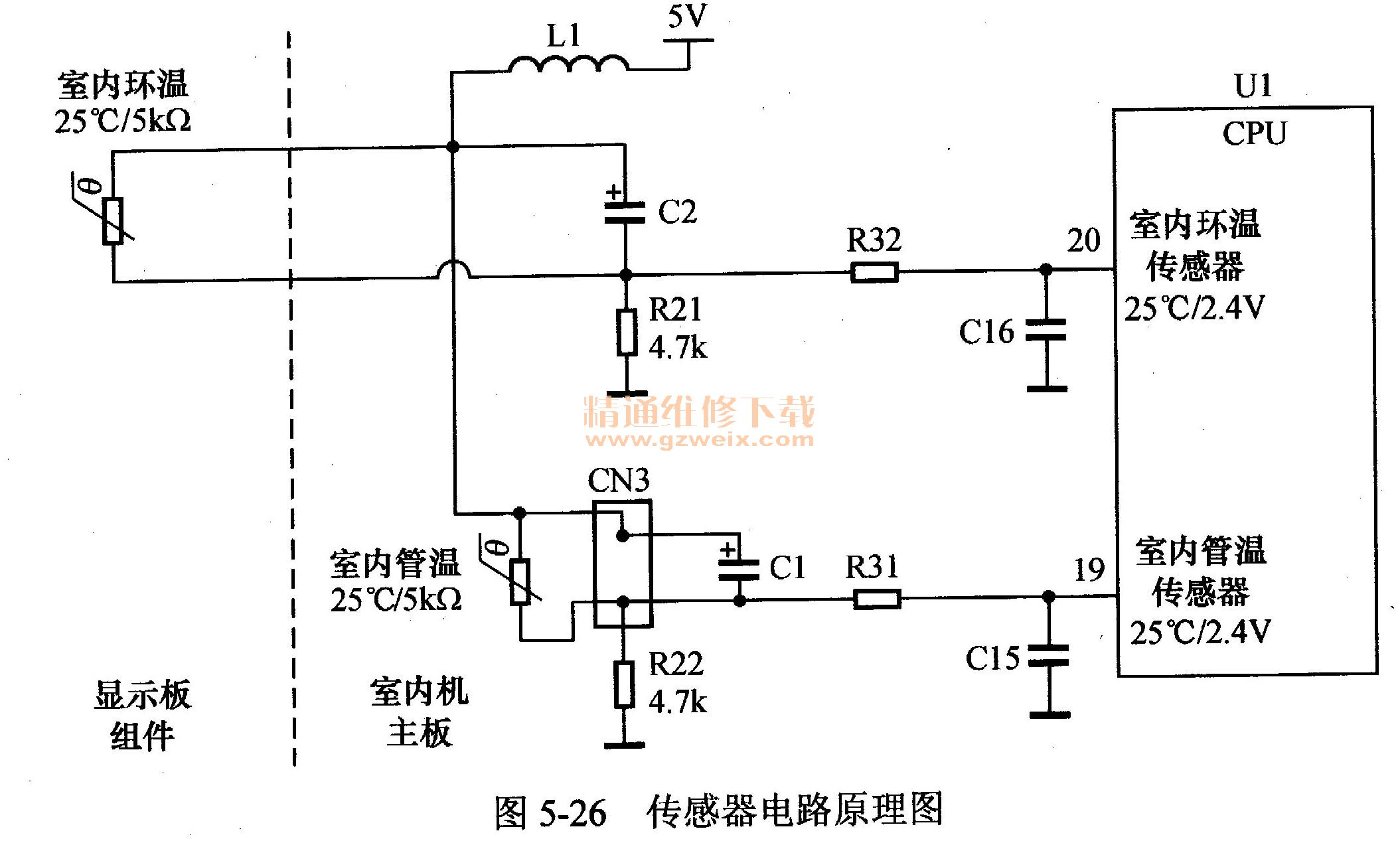
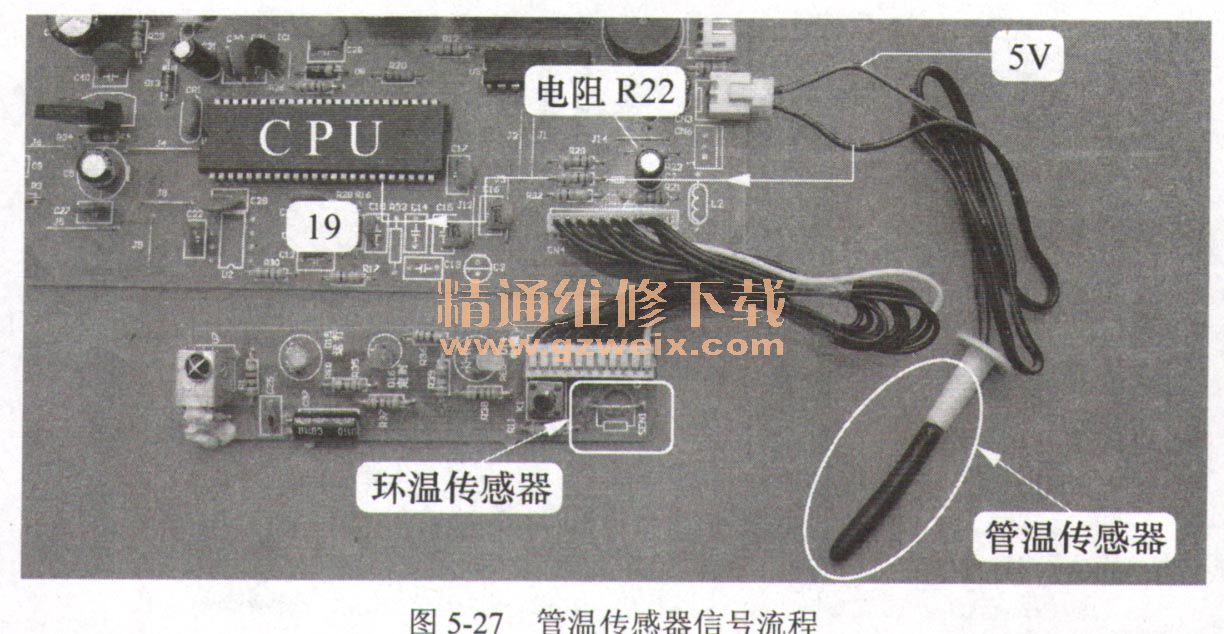
室内机CPU的20脚检测室内环温传感器温度,19脚检测室内管温传感器温度,两路传感器工作原理相同,均为传感器与偏置电阻组成分压电路,传感器为负温度系数(NTC)的热敏电阻。以室内管温传感器电路为例,如蒸发器温度由于某种原因升高,室内管温传感器温度也相应升高,其阻值变小,根据分压电路原理,分压电阻R22分得的电压也相应升高,输送到CPU19脚的电压升高,CPU根据电压值计算得出蒸发器的实际温度,并与内置的数据相比较,对电路进行控制。假如在制热模式下,计算得出的温度大于78℃,则控制压缩机停机,并显示故障代码。
该电路的传感器特性、电路组成与作用、温度与电压对应表、常见故障、传感器检测方法等相关知识参见第3章第3节的第三部分内容。
4.过零检测电路
(1)作用
该电路的作用为CPU提供电源电压的零点信号,以便CPU在零点附近驱动光耦可控硅的导通角,通过软件计算出电源供电是否存在瞬时断电的故障。本机主板供电使用开关电源,过零检测电路的取样点为交流220V。
说明:如果室内机主板使用变压器降压型电源电路,则过零检测电路取样点为变压器次级整流电路的输出端。两者电路设计思路不同,使用的元器件及检测点也不相同,但工作原理类似,所起的作用是相同的。
(2)工作原理
图5-28(a)所示为海信KFR 26GW/11BP过零检测电路原理图,图5-28(b)所示为实物图。
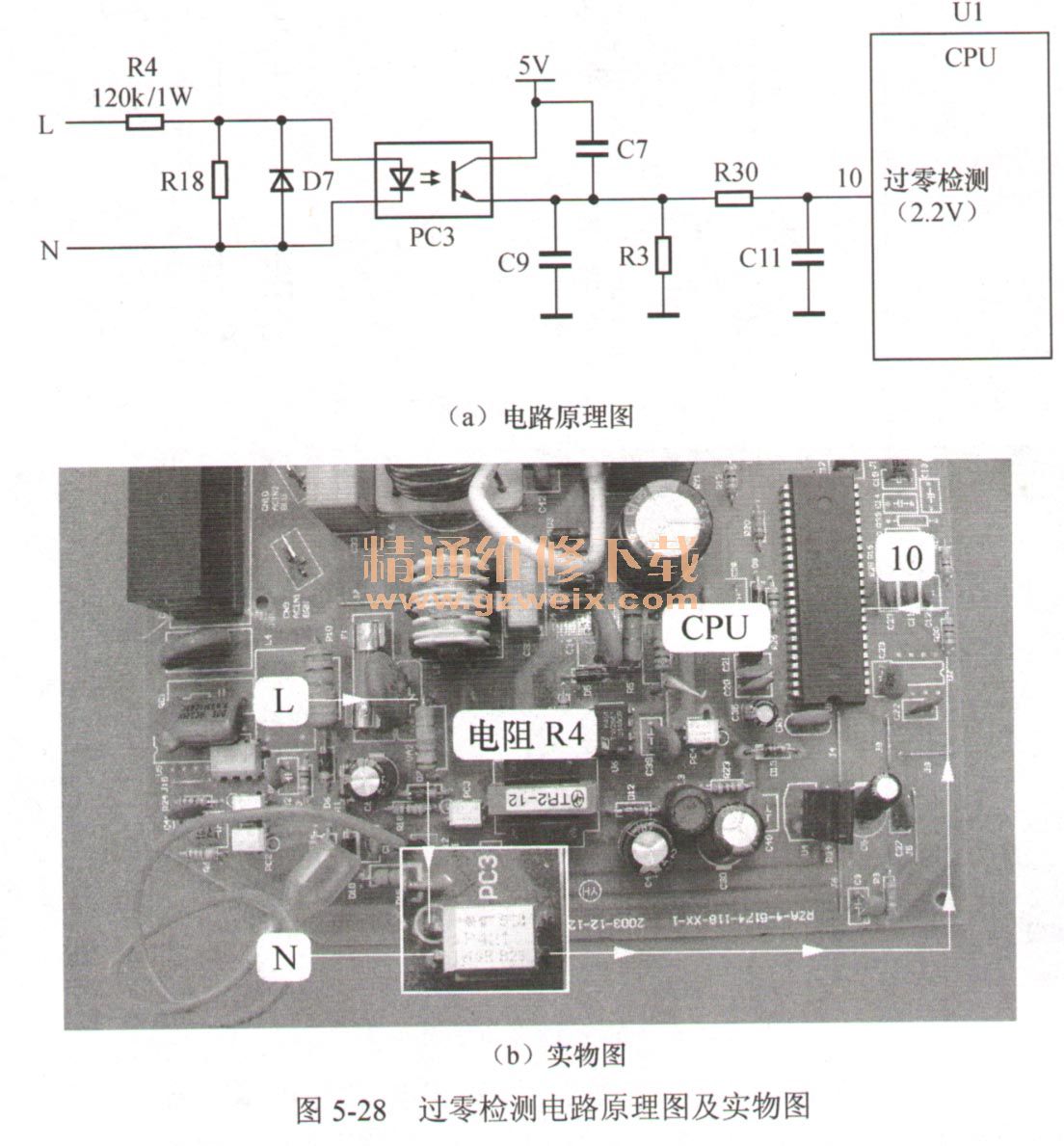
从电路原理图可以看出,本机过零检测电路与海信KFR-2601 GWBP室外机瞬时停电检测电路基本相同(第4章第3节的第四部分内容),工作原理也基本相同,只是所起的作用不同。
电路主要由电阻R4、光耦PC3等主要元器件组成。交流电源处于正半周即L正、N负时,光耦PC3初级得到供电,内部发光二极管发光,使得次级光电三极管导通,5V电压经PO次级、电阻R30为CPU⑩脚供电,为高电平5V;交流电源为负半周即L负、N正时,光耦PC3初级无供电,内部发光二极管无电流通过不能发光,使得次级光电三极管截止,CPU⑩脚经电阻R30、R3接地,引脚电压为低电平0V。
交流电源正半周和负半周极性交替变换,·光耦反复导通、截止,在CPU⑩脚形成100Hz脉冲波形,CPU内部电路通过处理,检测电源电压的零点及供电是否存在瞬时断电。
交流电源频率为每秒50Hz,每1Hz为一周期,一周期由正半周和负半周组成,也就是说CPU⑩脚电压每秒变化100次,速度变化极快,万用表显示值不为跳变电压而是稳定的直流电压,实测⑩脚电压为2.2V,光耦PC3初级为0.2V。
(3)常见故障
CPU⑩脚正常时为跳变电压,常见故障为电阻R4开路、光耦PC3初级发光二极管开路或内部光源传送不正常,次级一直处于截止状态,使CPU⑩脚恒为低电平0V,开机后室内风机不能运行,整机也不工作,并报“瞬时停电” 或“无过零信号”的故障代码。
5.霍尔反馈电路
图5-29(a)所示为海信KFR 26GW/11BP霍尔反馈电路原理图,图5-29(b)所示为实物图。
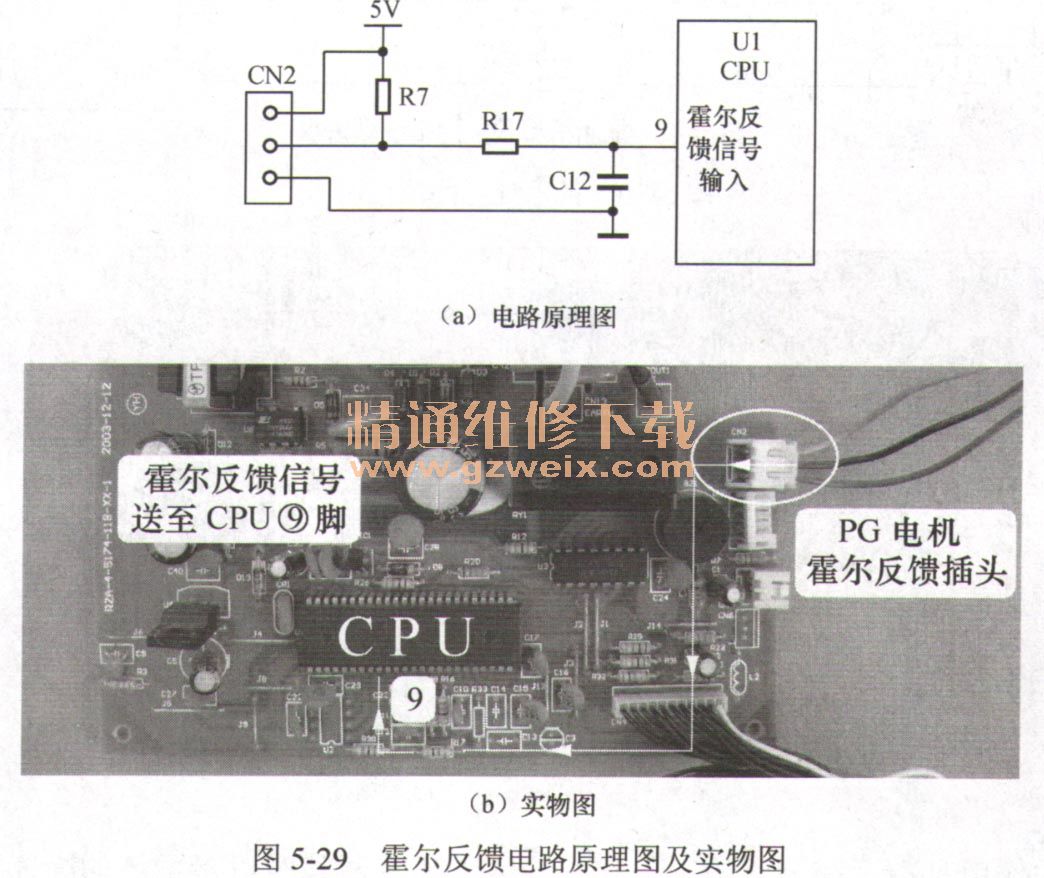
PG电机旋转一圈,内部霍尔元件会输出一个脉冲信号或几个脉冲信号(厂家不同,脉冲数量不同),CPU根据脉冲信号数量计算出实际转速。
该电路的作用是向CPU提供代表PG电机实际转速的霍尔信号,由PG电机内部霍尔反馈元件、电阻R7/R17、电容C12和CPU的⑨脚组成。
PG电机内部设有霍尔元件,旋转时输出端输出霍尔信号,通过CN2插座、电阻R17提供给CPU⑨脚,CPU内部电路计算出实际转速,与目标转速相比较,如有误差通过改变光耦可控硅导通角,从而改变PG电机工作电压,使实际转速与目标转速相同。
PG电机停止运行时,根据内部霍尔元件位置不同,霍尔反馈插座的信号引针电压即CPU⑨脚电压为5V或0V; PG电机运行时,不论高速还是低速,电压恒为2.5V,即供电电压5V的一半。
该电路的常见故障及霍尔元件检查方法等相关知识参见第3章第5节第五部分的内容。
上一页 [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] 下一页





