・上一文章:详解电动自行车技术分析与检修
・下一文章:奥迪A8轿车两三天电瓶没电
汽车起重机主要用于对物料进行起吊、运输、装卸及安装等。臂架类起重机,除发动机、底盘传动系统外,其工作装置主要是指起升、回转、变幅和伸缩,即起重机械的“四大机构”。
1 汽车起重机常用液压回咱
汽车起重机常用液压回路包括起升、伸缩、变幅、回转、支腿及转向等机构等液压回路。
1.1起升机构液压回路
起重机需要用起升机构,即卷筒一吊索机构实现垂直起升和下放重物。液压起升机构用液压马达通过减速器驱动卷筒,图1是一种最简单的起升机构液压回路。当换向阀3处右位时,通过液压马达2、减速器6和卷筒7提升重物G,实现吊重上升。而换向阀处于左位时下放重物G,实现负重下降,这时平衡阀4起平稳作用。当换向阀处于中位时,回路实现承重静止。由于液压马达内部泄漏比较大,即使平衡阀的闭锁性能很好,但卷筒一吊索机构仍难以支撑重物G。如要实现承重静止,可以设置常闭式制动器,依靠制动液压缸8来实现。
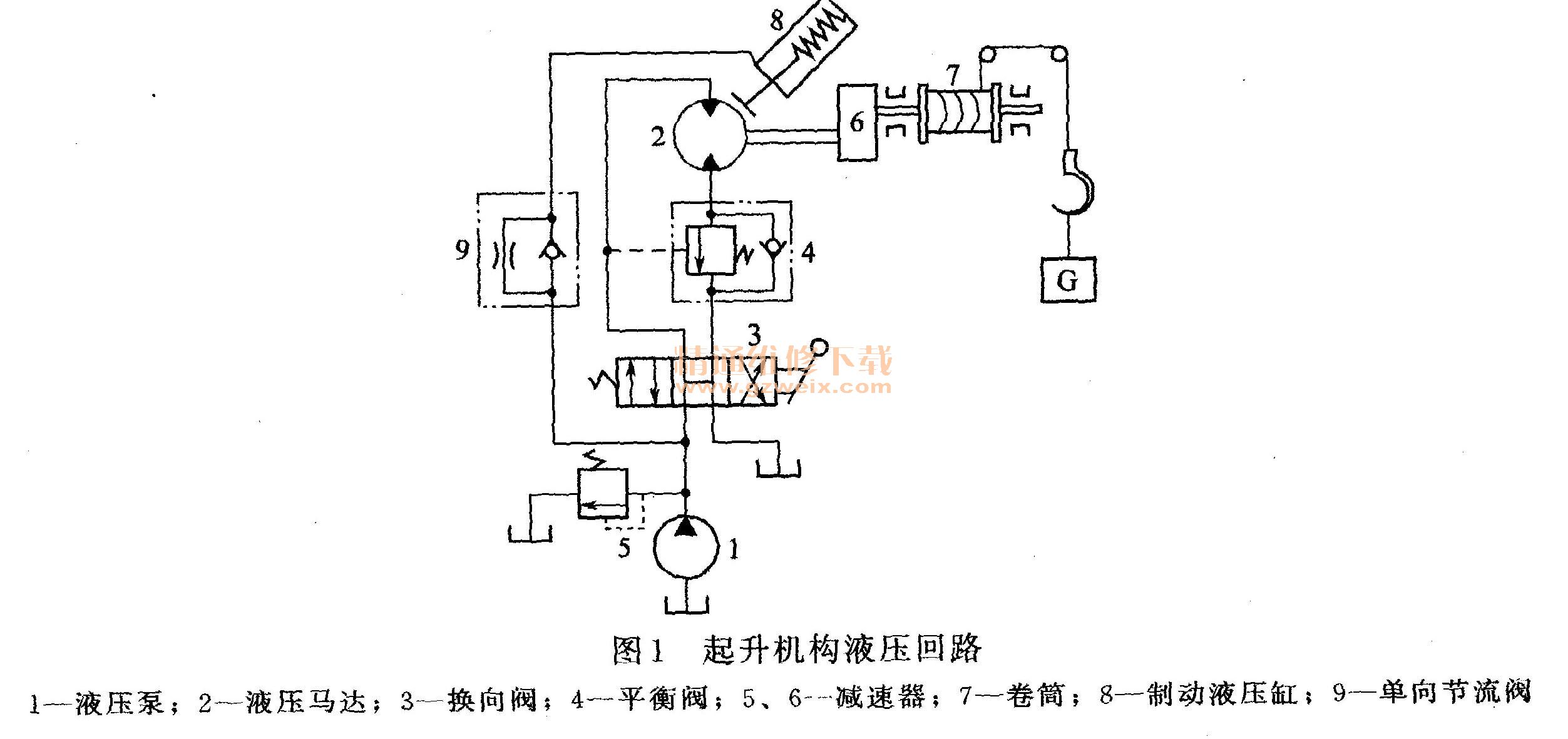
在换向阀右位(吊重上升)和左位(负重下降)时,泵I压出液体同时作用在制动缸下腔,将活塞顶起,压缩下腔弹簧,使制动器闸瓦拉开,这样液压马达不受制动。换向阀处于中位时,泵卸荷,泵出口接近零压,制动缸活塞被弹簧压下,闸瓦制动液压马达,使其停转,重物G就静止于空中。
某些起升机构要求开始举升重物时,液压马达产生一定的驱动力矩,然后制动缸才彻底拉开制动闸瓦,以避免重物G在马达驱动力矩充分形成前向下溜滑。所以在通往制动缸的支路上设单向节流阀9,由于阀9的作用,拉开闸瓦的时间放慢,有一段缓慢的动摩擦过程;同时,液压马达在结束负重下降后,换向阀3复中位,阀9的单向阀允许迅速排出制动缸下腔的液体,使制动闸瓦尽快闸住液压马达,避免重物G继续下降。
1.2伸缩臂机构液压回路
伸缩机构是一种多级式伸缩起重臂伸出与缩回的机构。图2为伸缩臂机构液压回路,臂架有3节,工是第1节臂,或称基臂;II是第2节臂;III是第3节臂;后一节臂可依靠液压缸相对前一节臂伸出或缩进。3节臂只要两只液压缸:液压缸6的活塞与基臂工铰接,而其缸体铰接于第2节臂II,缸体运动臂II相对臂工伸缩;液压缸7的缸体与第2节臂II铰接,而其活塞铰接于第3节臂III,活塞运动使臂III相对于臂II伸缩。

第2和第3节臂是顺序动作的,对回路的控制可依次做如下操作。
① 动换向阀2左位,电磁阀3也左位,使液压缸6上腔压入液体,缸体运动将第2节臂II相对于基臂I伸出,第3节臂III则顺势被臂II托起,但对臂II无相对运动,此时实现举重上升。
②手动换向阀仍左位,但电磁换向阀换右位,液压缸6因无液体压入而停止运动,臂II对臂I也停止伸出,而液压缸7下腔压入液体,活塞运动将臂班相对于臂II伸出,继续举重上升。连同上一步序,可将3臂总长增至最大,将重物举升至最高位。
③手动换向阀换为右位,电磁换向阀仍为右位,液压缸7上腔压入液体,活塞运动臂III相对于臂II缩回,为负重下降,故此时需平衡阀5作用
④手动换向阀仍右位,电磁换向阀换左位,液压缸6下腔压入液体,缸体运动将臂II相对于臂工缩回,亦为负重下降,需平衡阀4作用。
如不按上述次序操作,可以实现多种不同的伸缩顺序,但不可能出现两个液压缸同时动作。
伸缩臂机构可以不同的方法,即不采用电磁阀而用顺序阀,液压缸面积差动,机械结构等办法实现多个液压缸的顺序动作,还可以采用同步措施实现液压缸的同时动作。
1.3变幅机构液压回路
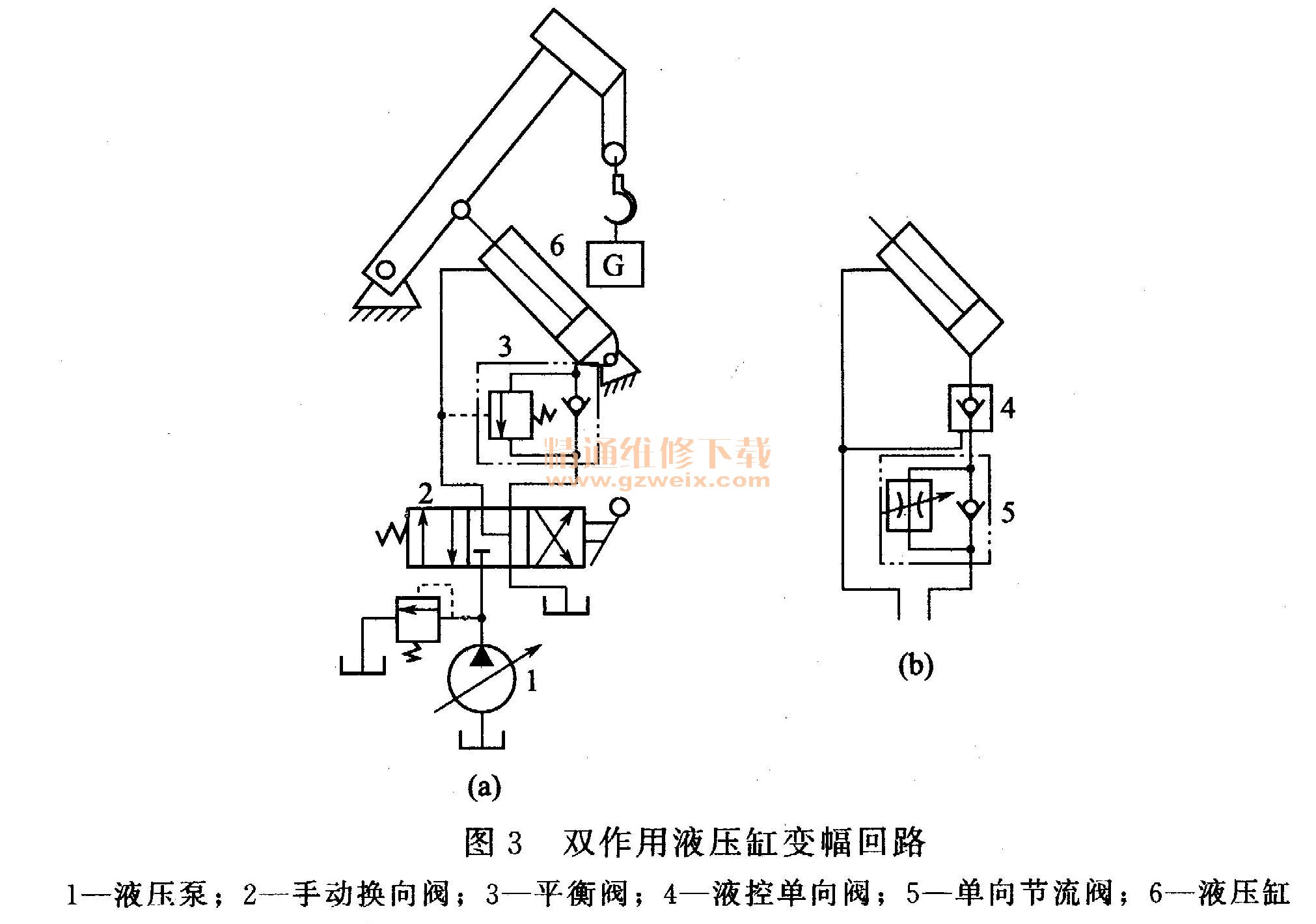
变幅机构在起重机、挖掘机等工程机械中,用于改变臂架的位置,增主机的工作范围。最常见的液压变幅机构是用双作用液压缸作液动机,也有采用液压马达和柱塞缸。图2-3为双作用液压缸变幅回路。
液压缸6承受重物G及臂架质量之和的分力作用,因此,在一般情况下应采用平衡阀3来达到负重匀速下降的要求,如图3 (a)所示。但在一些对负重下降匀速要求不很严格的场合,可以采用液控单向阀4串联单向节流阀5来代替平衡阀,如图3 (b)所示。其中阀4的作用,一是在承重静止时锁紧液压缸6;二是在负重下降时泵形成一定压力打开控制口,使液压缸下腔排出液体而下降。但阀4却没有平衡阀使液压缸匀速下降的功能,然而这种功能由单向节流阀5来实现。由于节流阀形成足够压力的动态过程时间较长,所以实际上液压缸在相当长时间内加速下降,然后才实现匀速,这一点就不如平衡阀性能好。
[1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] 下一页
")
")
")
")

