(五)主动盲点辅助系统
主动盲点辅助功能是对盲点辅助功能的扩展。主动盲点辅助系统还可将车辆所处的环境考虑在内,启用制动系统干预。主动制动干预在单个车轮的基础上进行,并校正车辆的路线。如果检测到处于盲点区域内的车辆存在碰撞风险,则可因此避免事故的发生或降低事故的严重程度。
无法通过车外后视镜和车内后视镜观察的区域通过以下部件监视:后保险杠右外侧雷达传感器、后保险杠左外侧雷达传感器。
路线校正干预的一个必要条件是监测车辆前方的道路空间,以免出现与迎面驶来的车辆或静止的障碍物发生碰撞等情况。
对前方道路空间的监测通过以下部件执行:
·车辆前方距离大于0.5~3m:前保险杠内部左侧雷达传感器(A86/1b2)、前保险杠内部右侧雷达传感器(A86/1b3)
·车辆前方距离大于3~27m:限距控制系统(DTR)控制模块(A89)
来自前保险杠雷达传感器的信号通过CAN S(传感器控制器CAN)传送至视频和雷达传感器系统控制模块(N62/2)。来白限距控制系统(DTR)电控单元的信号通过CAN H(动态CAN)传送至视频和雷达传感器系统控制模块。所有相关数据均由视频和雷达传感器系统控制模块进行评估。
盲点辅助系统原理示意图,如图46所示。

雷达传感器控制模块(装配盲点辅助系统/代码234)或视频和雷达传感器系统控制模块(装配主动盲点辅助系统/代码237)读取以下信息来决定是否启用盲点辅助监测功能:
“盲点辅助”功能的状态,已在仪表中启用“盲点辅助”功能
·车辆向前行驶,车速≥30km/h
·未操作制动器或制动辅助系统未进行主动控制干预(装配主动盲点辅助系统/代码237)
·驾驶员(安全带)及车门状态(装配主动盲点辅助系统/代码237)
仪表将“盲点辅助”功能的状态通过中央CAN传送至中央网关控制模块,中央网关控制模块将“盲点辅助”功能的状态通过底盘CAN传送至雷达传感器控制模块或视频和雷达传感器系统控制模块。发动机控制模块(N3/10)通过底盘CAN传送发动机转速至雷达传感器控制模块或视频和雷达传感器系统控制模块。车轮转速和车轮的转动方向由轮速传感器检测并发送至ESP控制模块,ESP控制模块通过底盘CAN传送至雷达传感器控制模块或视频和雷达传感器系统控制模块。制动状态由ESP控制模块检测通过底盘控制器区域网络(CAN)传送至雷达传感器控制模块或视频和雷达传感器系统控制模块。
盲点辅助功能包括以下子功能:
·测量程序功能顺序
·系统和警告信息的功能顺序
·通过制动系统进行主动干预的功能顺序(装配主动盲点辅助系统/代码237)
1.测量程序功能顺序
根据雷达测量程序捕获处于盲点中的车辆。在此过程中,来自雷达传感器的电磁波形成波束,并作为所谓的主要信号发出。如果这些信号撞击到处于盲点中的车辆,就会被其反射并由相应的车轮传感器再次接收为次级信号。可利用这些信号计算检测到的物体的距离和速度。
雷达传感器为超宽频带雷达传感器,具有以下特征:
·捕获范围0.5~3m
·载波频率为24GHz的雷达传感器
·带宽为5 GHz的短脉冲载波方法
监测范围的示意图(盲点辅助系统/代码234),如图47所示。

监控区域示意图(装配主动盲点辅助系统/代码237),如图48所示。

短程雷达传感器系统的自动停用功能:
为遵守24GHz雷达系统(短程雷达)的相关法规要求,在无线电天文台附近,短程雷达传感器系统会自动停用,因此,盲点辅助系统在这些区域中不起作用。无线电天文台周围的保护区域存储在雷达传感器控制模块或视频和雷达传感器系统控制模块中,
COMAND控制模块(A40/3)通过中央CAN、中央网关控制模块和底盘CAN传送来自导航系统的位置数据。雷达传感器控制模块或视频和雷达传感器系统控制模块通过底盘CAN接收此信息,并停用雷达传感器系统。当车辆驶离无线电天文台周围的保护区域时系统功能白动启用。也可以通过操作仪表中的“车辆”菜单手动开启或关闭雷达传感器系统。
2.雷达传感器系统自动关闭的示意图(车型221),如图49所示

3.系统和警告信息的功能顺序
当点火开关15电路接通时,盲点辅助系统就绪和警告指示灯开启,先亮起红色1.5s、然后变为黄色。车速达到30km/h以上时,盲点辅助系统的就绪和警告指示灯再次消失,盲点辅助系统即将发出警告。如果检测到系统故障,则多功能显示屏上会显示相应的信息,且盲点辅助系统的就绪和警告指示灯以黄色光点亮。
盲点辅助系统就绪:
如果车速大于30km/h且车辆处于雷达传感器系统的探测范围内,则车辆处于盲点一侧的车外后视镜中的指示灯会以红色光点亮(图50),以向驾驶员发出警告。系统就绪状态和输出故障信息的请求由雷达传感器控制模块(装配盲点辅助系统/代码234)或视频和雷达传感器系统控制模块(装配主动盲点辅助系统/代码237)通过底盘CAN传送至中央网关控制模块。仪表通过中央CAN接收输出故障信息的请求(由中央网关控制模块提供)。中央网关控制模块通过底盘CAN接收系统就绪状态和输出故障信息的请求,并将其通过车内CAN继续传送至左前车门控制模块和右前车门控制模块,车门控制模块进而促动相应的警告指示灯。可以检测到最大相对车速为35km/h的超车车辆,在某些情况下具有更高相对速度的车辆会检测得太迟或根本无法检测到。如果驾驶员试图在盲点辅助系统警告指示灯点亮时变换车道,并通过操作组合开关发出转向灯信号,则仪表中的报警蜂鸣器也会输出一次性的双警告音。如果车辆离开雷达传感器系统的检测区域,则正在红色闪烁的盲点辅助系统警告灯熄灭。

车辆处于盲点区域内:
发出警告信息的信号弧度对应于显示系统就绪的信号弧度(图51)。组合开关的位置由转向柱管模块(N80)直接读人,并通过底盘CAN传送。雷达传感器控制模块或视频和雷达传感器系统控制模块通过底盘 CAN接收组合开关的操作位置。
 4.制动系统进行主动干预的功能顺序(装配主动盲点辅助系统/代码237)
4.制动系统进行主动干预的功能顺序(装配主动盲点辅助系统/代码237)
制动系统进行主动干预的附加功能要求:电子车辆稳定行驶系统ESP未切换至被动模式,防抱死制动系统(
ABS)、防加速打滑控制(
ASR)、制动辅助系统(BAS),电子车辆稳定行驶系统(ESP),预防性安全(PRE -SAFE)制动系统未启用,车辆速度小于200km/h。
如果在有意换道期间,视频和雷达传感器系统控制模块检测到即将与车辆发生侧部碰撞的预兆,则请求制动系统进行路线校正干预。为此,视频和雷达传感器系统控制模块将相应的请求通过底盘CAN传送至ESP控制模块,ESP控制模块则相应地执行这些请求,选择性地对单个车轮进行制动,并使车辆重新回到不会发生碰撞的路线上。如果制动系统干预期间驾驶员往制动系统干预的相反方向操纵车辆(即忽略制动系统的干预或加速)则制动系统的干预立即取消。
驾驶辅助和驾驶安全系统、防抱死制动系统(
ABS)、防加速打滑控制(
ASR)、制动辅助系统(BAS)、电控车辆稳定行驶系统(ESP)和预防性安全(PRE-SAFE)系统的优先性高于主动盲点辅助系统,并可导致制动系统的干预被取消。
在发生以下情况之一时,系统始终停用制动系统的路线校正干预:
·轮胎压力损失
·在2.6s内沿行驶方向与车辆或障碍物发生正面碰撞(连续行驶情况)
·车辆存在纵向加速度或减速度、且横向加速度为0.4~0.6加速度力,由横摆率传感器B24/15记录,并通过动态CAN将信息传送至视频和雷达传感器系统控制模块
·驾驶员进行转向盘速度大于3000/s的不平稳转向动作。转向运动由
转向角传感器N49检测并由转向柱管模块读人,后者将转向角速度的相关信息通过底盘CAN传送至视频和雷达传感器系统控制模块
图示制动系统的路线校正干预的抑制,如图52~图56所示。
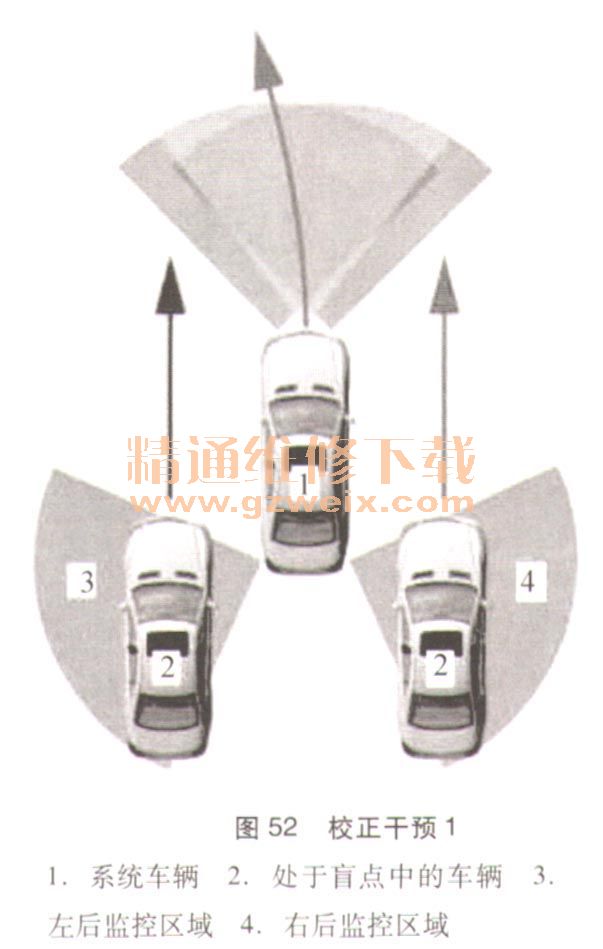

如果系统车辆(1)的两侧均有车辆处于自点(2)中,则制动系统的路线校正干预被停用。
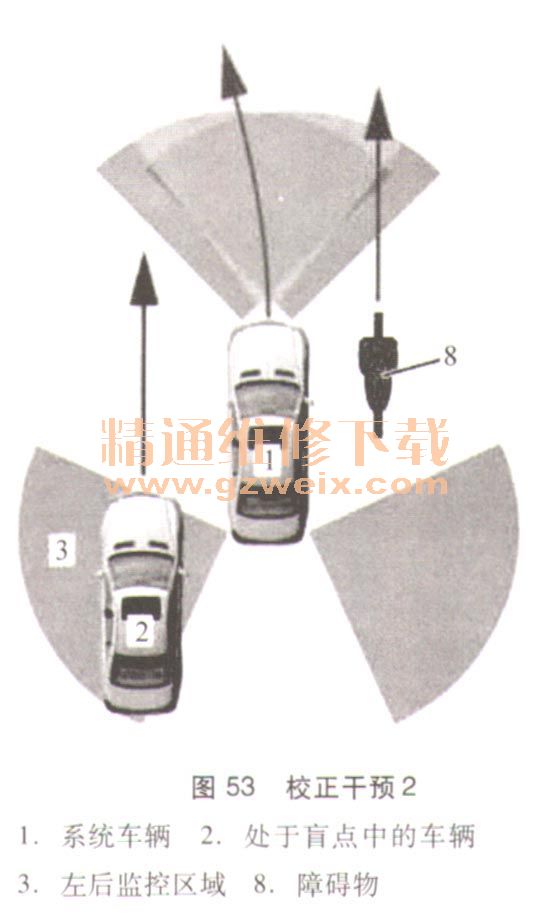
如果障碍物(8)位于系统车辆(1)的侧面,无法检测到其位置,则制动系统在障碍物(8)方向上的路线校正干预被停用。
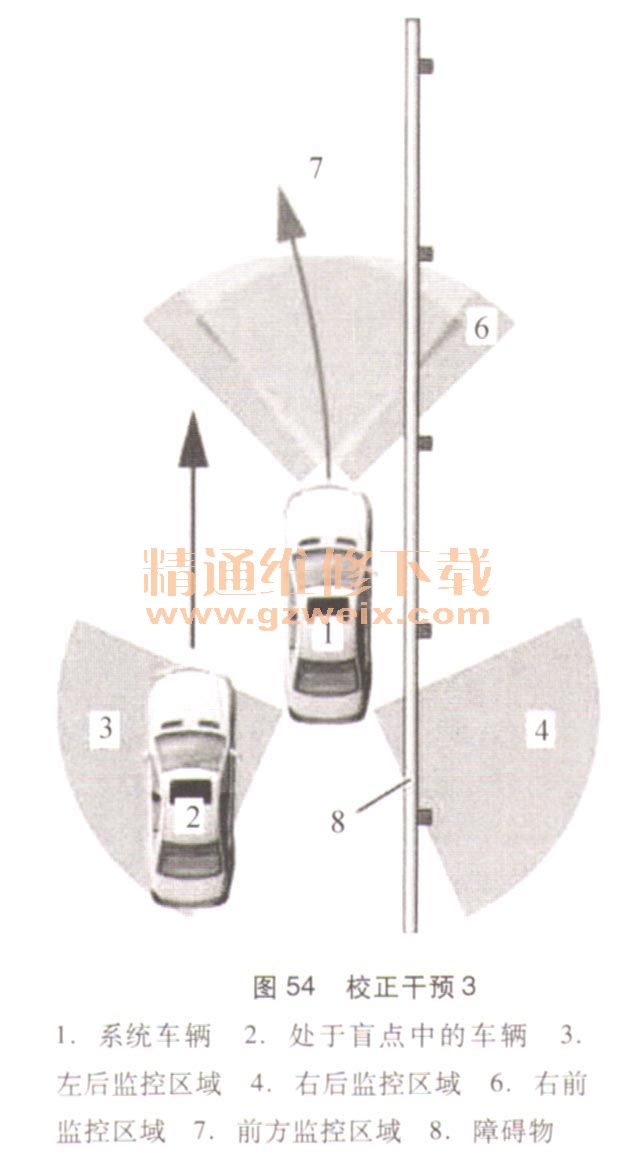
如果检测到静止障碍物(8)位于系统车辆(1)的一侧,则制动系统在障碍物(8)方向上的路线校正干预被停用。
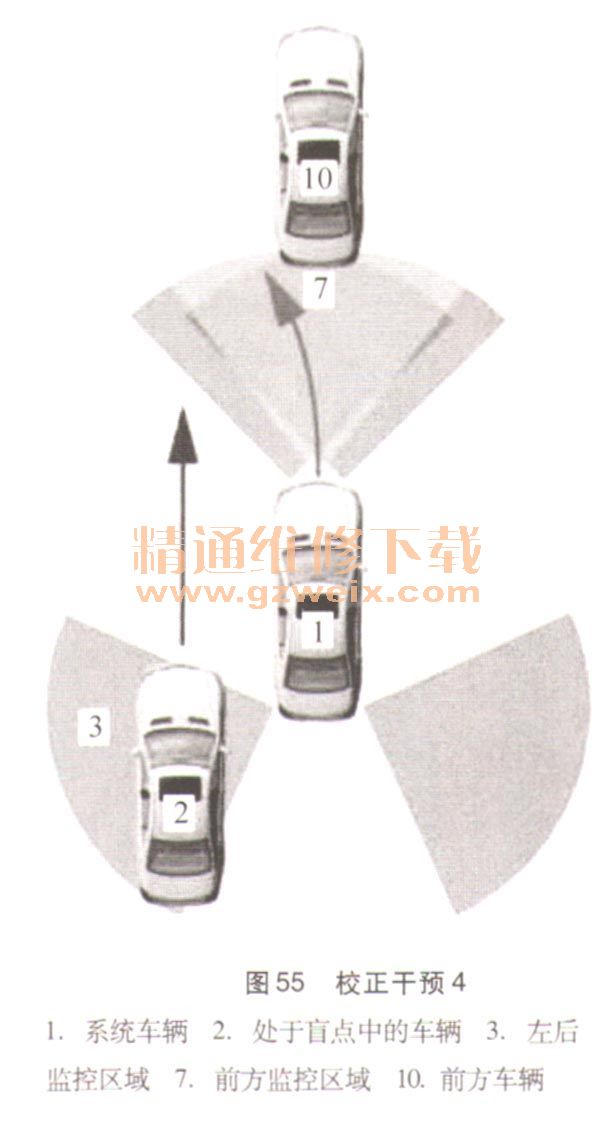
存在即将与前方车辆(10)和处于盲点(2)中的车辆发生碰撞的风险时,制动系统的路线校正干预被停用。不发出声讯报警!
存在即将与静止障碍物(8)和处于盲点(2)中的车辆发生碰撞的风险时,制动系统的路线校正干预停用。不发出声讯报警!
上一页 [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] 下一页
")
")
")
")

