・上一文章:大众帕萨特发动机不能启动
・下一文章:风速125 mL踏板车怠速运转时有异响

式中:F1—施加到变挡杆的作用力,N
X1—变挡杆与水平线的夹角,(。)
FEB—变档杆作用于变挡力臂的力,N
x2—变挡摆臂与竖直方向的夹角,(。)
x3—变档杆与水平方向的夹角,(。)
l1—变档杆理论作用长度,mm
l2—变挡摆臂作用长度,mm
按图4的力学模型,施加于摆臂的作用力FEB产生的力矩要大于变挡轴的变挡力矩Mo,即:

式中:FEB—变挡拉杆作用于变挡轴的作用力,N
x4—摆臂与竖直方向夹角,(。)
13—摆臂作用长度,mm
M0—发动机换档力矩,Nm
由式(1)、(2)可知:

即

因为x1 ≠0, x2、 x:均为锐角,l1\13≠0,所以(3)式分母不为0。
4 利用MATLAB求目标函数最优解
4.1目标函数及边界条件
a)目标函数:根据图2可知,在实际换挡过程中,如果变档摆臂与摆臂相互平行,根据理论力学可知,变挡拉杆将做平行运动,此时,变挡拉杆不会产生转动惯量,换档就会轻松。故,在实际设计当中,要保持二者平行布置,即x4=x2,所以(3)式可以简化为:

b)边界条件:
l1、l2、13>0 (5)
0°<x1<90° (6)
L1、l3≤3200 l2 (7)
4.2 MATLAB优化算法
MATLAB软件提供了多种优化算法,MATLAB可以直接调用这些优化函数进行最优解计算。本文采用fmincon优化函数进行最优求解,调用的程序算法如下。
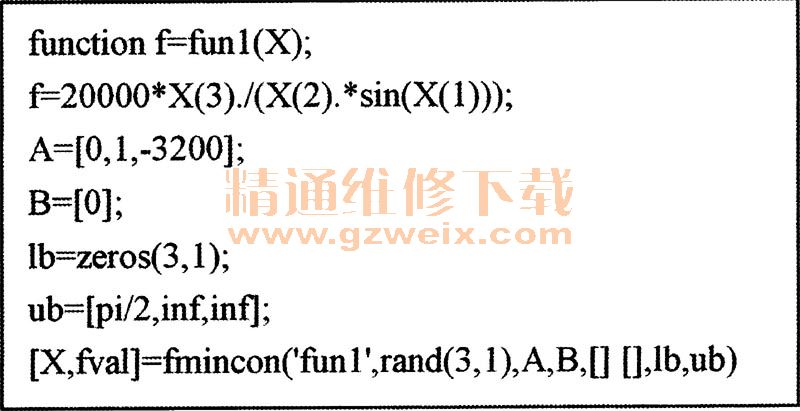
实例计算:以某型号发动机手变挡操纵机构为例进行计算,

在MATLAB程序中,利用上面程序,带入数据。求得最优值时X1=1.6,X2=544.28,X3=1.7,F1=6.2。
5 结论
a)本文通过对实际手变挡模型的简化,利用整体法建立了正三轮摩托车手变挡机构的力学物理模型,并通过力学分析建立了手变挡机构的受力方程。
b)利用MATLAB提供的优化算法,对建立的手变挡机构的力学方程在边界条件下求得了参数的最优解。
c)通过实例计算,验证了本文方法的正确性和可行性,为手变挡机构的设计提供了参考依据。

")



