・上一文章:丰田卡罗拉EX轿车发动机故障灯亮
・下一文章:路虎神行者2行驶中仪表黑屏
友情链接:奔驰盲点辅助系统简介
为了降低在车辆变道时后方和侧方视觉盲点可能造成的潜在危险,盲点辅助系统利用近距离雷达监测车辆后部及侧面区域的情况,并在必要时通知驾驶人不建议在该时间段主动变道(通过组合开关的转向信号识别驾驶人的变道意图)。盲点辅助系统起到了扩展后视镜功能,消除盲点的作用。
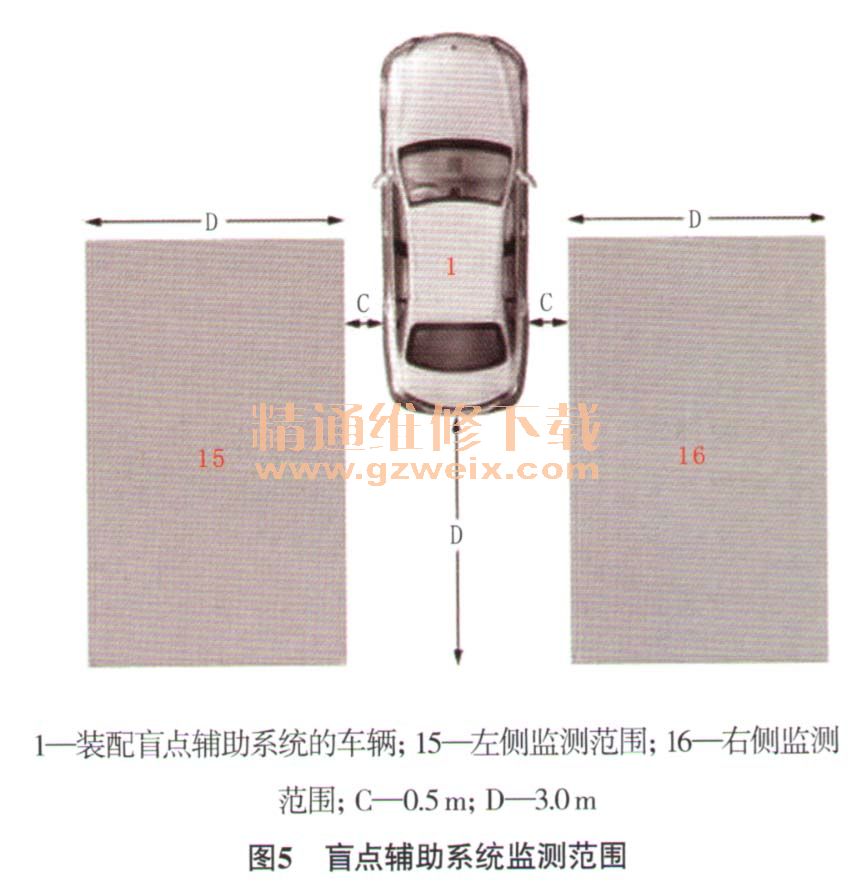
当盲点辅助系统的工作条件得到满足时(盲点辅助系统的工作条件包括盲点辅助系统启用、蓄电池电压正常、发动机运转、无挂车、车辆向前行驶且车速≥30km/h),系统会通过左后智能雷达传感器和右后智能雷达传感器对后视镜观察不到的区域进行监测(监测范围如图5所示)。在接通点火开关后,盲点辅助系统就绪和警告指示灯(在外后视镜上的位置如图6所示)呈红色点亮1.5 s,随后变为黄色。当车速达到30 km/h后,盲点辅助系统就绪和警告指示灯熄灭,说明盲点辅助系统已就绪,可随时根据情况发出警告信息。

智能雷达传感器发射的电磁波在遇到障碍物后反射,智能雷达传感器通过接收反射的电磁波判断障碍物的距离、运动速度和相对于车辆的角度等数据,再结合发动机运转信号、车速信号、挂车识别信号、盲点辅助系统状态等信息进行综合评佑,然后由右后智能雷达传感器根据评估结果决定是否请求警告输出(通过CAN E将请求信息传递给相关控制单元)。如果有车辆位于智能雷达传感器的探测范围内,则盲点辅助系统就绪和警告指示灯变为红色,以提示驾驶人有车辆位于该侧的盲点监测区域内,如果此时驾驶人仍试图向该侧变道,并操作转向信号灯开关,盲点辅助系统就绪和警告指示灯会呈红色闪烁,仪表蜂鸣器会发出2声警告音;当位于盲点监测区域内的车辆离开时,盲点辅助系统就绪和警告指示灯熄灭。如果检测到系统存在故障,仪表信息中心会显示相应的故障信息,盲点辅助系统就绪和警告指示灯呈黄色,氛亮。
智能雷达传感器的网络框图如图7所示,各控制单元之间信息传递情况如下。
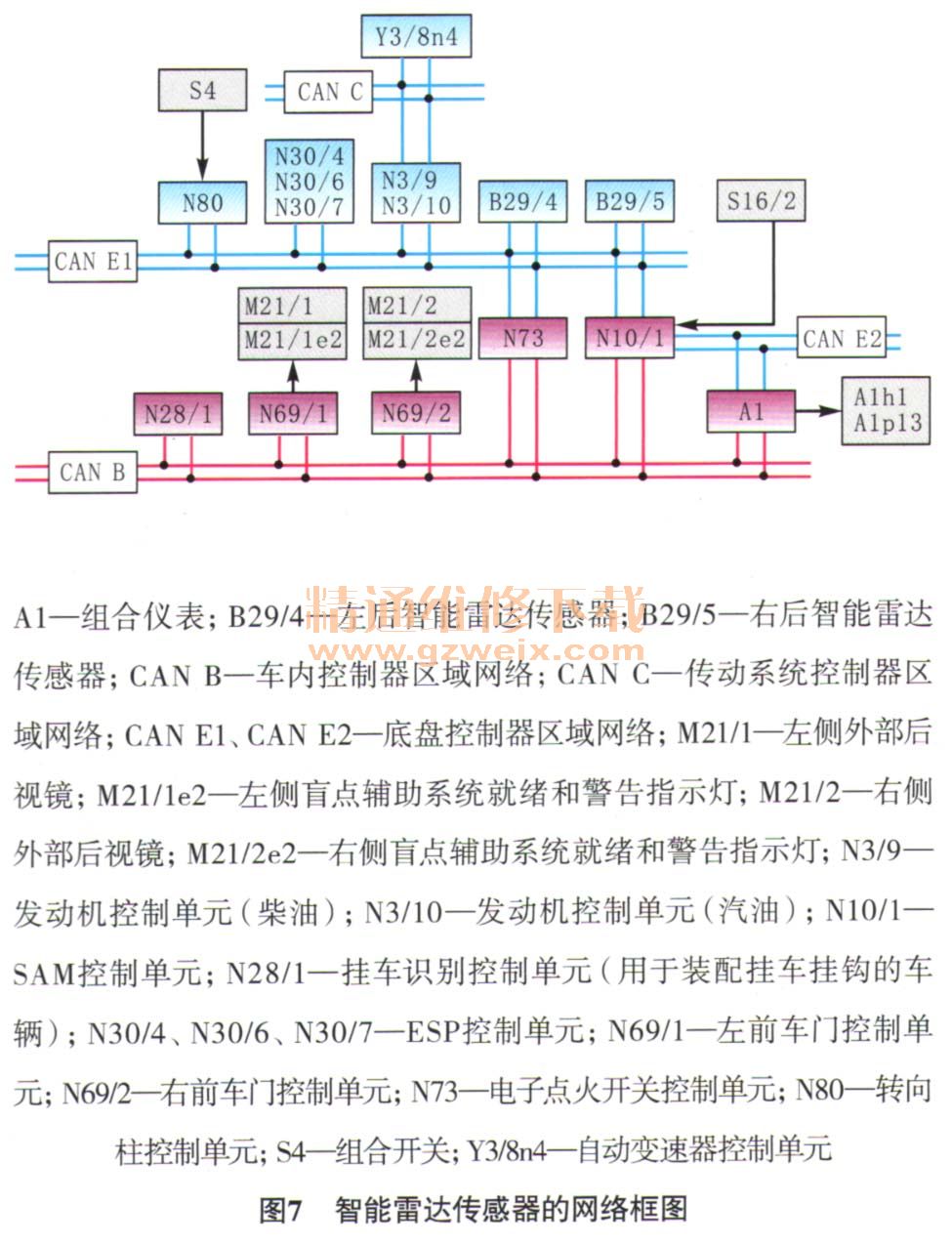
左后智能雷达传感器通过底盘控制器区域网络(CANE) 1将信息传递给右后智能雷达传感器;电子点火开关控制单元的信号通过底盘控制器区域网络(CAN E) 1传递给右后智能雷达传感器;转向柱控制单元通过底盘控制器区域网络(CAN E1)将组合开关信号传递给右后智能雷达传感器;组合仪表通过底盘控制器区域网络(CAN E2)和前SAM控制单元将盲点辅助系统状态信息传递给右后智能雷达传感器;发动机控制单元通过底盘控制器区域网络(CANE1)和前SAM控制单元将发动机运转信号传递给右后智能雷达传感器;ESP控制单元通过底盘控制器区域网络(CAN E1)将车速信号传递给右后智能雷达传感器;自动变速器档位信号通过传动系统控制器区域网络(CAN C)、发动机控制单元、前SAM控制单元和底盘控制器区域网络(CAN E1)传递给右后智能雷达传感器;挂车识别控制单元通过车内控制器区域网络(CAN B)、前SAM控制单元和底盘控制器区域网络(CAN E1)将挂车状态信息传递给右后智能雷达传感器。
右后智能雷达传感器处理上述信息,并在必要时输出相关信息,包括盲点辅助系统就绪/警告信息,以及故障信息等。右后智能雷达传感器将信息通过底盘控制器区域网络(CAN E1)、前SAM控制单元和底盘控制器区域网络(CANE2)传递给组合仪表,组合仪表根据情况,控制仪表蜂鸣器发出警告音或在仪表信息中心显示相关故障信息等;右后智能雷达传感器将信息通过底盘控制器区域网络(CAN E1)、前SAM控制单元和车内控制器区域网络(CAN B)传递给左前车门控制单元或右前车门控制单元,再由车门控制单元控制外后视镜上的盲点辅助系统就绪和警告指示灯点亮。
相关资料:2014年最新版奔驰维修信息系统WIS (中文无限安装)





