・上一文章:新能源车辆暖风和空调系统浅析(上)
・下一文章:CL125T-3水冷摩托车发动机温度上升过快
3.1自主模式
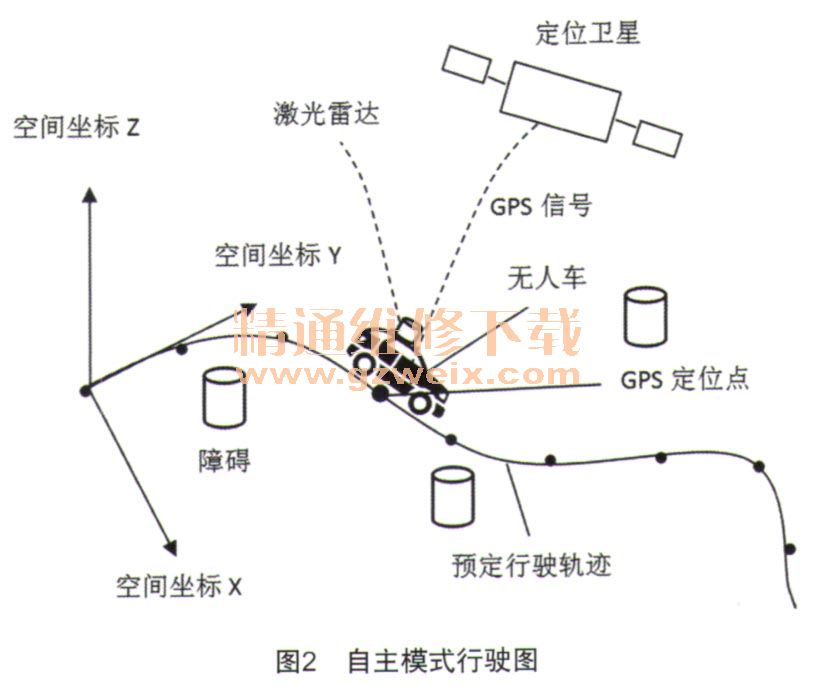
主控系统首先检测遥控器发送的模式指令,在接受到自主模式指令的情况下,自动切换到自主模式。主控系统根据NMEA-0183协议解析差分GPS的GGA信号以获取车辆位置及航向角信息,并将经纬度信息转换成空间距离信息,使用跟随预瞄控制模型实现无人驾驶汽车的轨迹跟随功能。解析激光雷达的UDP数据包以获取车辆周围环境的三维点云或者分析双目相机空间深度图,建模并识别道路路沿,判断可行驶区域以及检侧道路上的障碍物,实现无人驾驶汽车的避障功能。
在控速方面,通过K60核心控制器的FTM模块输出PWM波控制油门舵机实现车辆的运动,车速信号通过安装在汽车后轮上的旋转编码器采集并反馈给主控板,主控系统通过PID闭环调节油门舵机,使汽车稳定在预先设定的行驶速度,行驶速度的设定随汽车转向盘转角的增加而减小。
在转向方面,无人驾驶车辆的行驶轨迹一般由系统提前设定,按照规划的路径完成避障行驶,汽车在行驶过程中通过GPS能够进行准确定位,实时分析自身与预定轨迹的行驶偏离,核心处理器再通过输出PWM波调节转向舵机使车辆实现轨迹跟随。
在制动方面,自主状态下,制动信号主要取决干激光雷达与双目相机的分析结果,在检测到障碍物并得到与车辆的距离信息后,主控系统控制制动舵机进行相应的制动动作。白主模式如图2所示。
3.2遥控模式
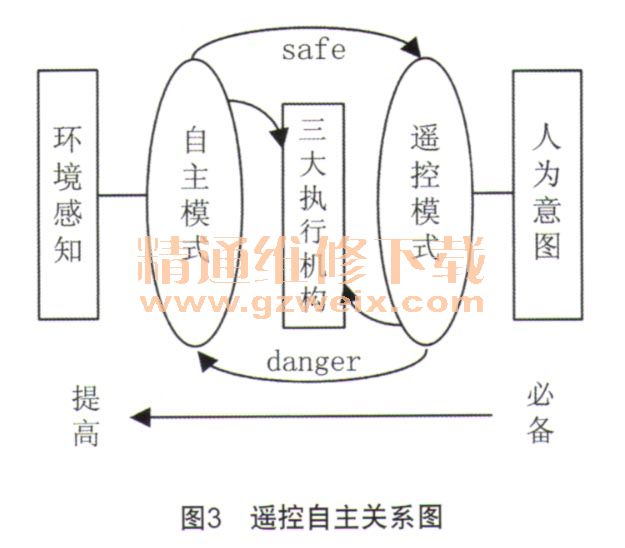
主控系统在接收到遥控指令的情况下进入遥控模式。遥控模式的主要目的是为自主模式的研发与测试提供便利。在遥控模式时,主控系统接受由遥控器传递的控速信号、转向信号和制动信号,可以通过遥控方式实现无人驾驶试验车辆的远距离遥控。遥控系统与主控系统通过增强型NRF24101进行通讯,遥控距离可达1 000 m。同时,遥控模式也是为自主模式做的准备工作,两种模式区别在于一种是按照自主避障跟随的方式行驶,一种是按照人为主观意图无线遥控运动,但两种模式都需要通过主控系统控制三大执行机构完成相应的动作。三大执行机构是在原自动挡汽车的基础上改装的,因此对改装后三大机构的测试是不可或缺的,在实际做自主的无人驾驶试验之前,通过在遥控模式下对三大机构的测试,可以做好自主模式前的准备工作。
无人驾驶试验车辆的试验过程具有一定的危险性。在自主模式下,如果无人驾驶试验车辆未按照规划的轨迹行驶或者是未进行有效的实现避障动作,就需由自主模式迅速切换到遥控模式。因此,遥控模式在无人驾驶试验的过程中,无论是在试验便捷性方面,还是在安全性方面,都具有着特别重要的意义。遥控自主关系如图3所示。
4 遥控系统设计
遥控系统的主要功能是实现人为信号的输入,包括模式选择信号、转向输入信号、控速输入信号、制动输入信号和档位切换信号,将这些信号进行采集并同步发送给主控系统,同时接受来自主控系统反馈回的车速信号和故障信号等,并在遥控系统的显示模块实时显示各状态的参数。遥控系统也选用NXP的MK60DN512芯片作为核心处理器,也配备NRF24101无线通讯模块,与主控系统实现信号的互发互收。
4.1模式选择
两种模式的切换由一路开关控制,在开关接上时,由电路给控制器MK60DN512提供低电压;在断开时提供高电压。通过控制器的一路GPIO口检测这一电压,在检测到高电压时,遥控器绿灯亮,为遥控模式,遥控器向主控系统发送模式指令0;在检测到低电平时,遥控器红灯亮,为自主模式,遥控器向主控系统发送模式指令1。
4.2转向输入
转向信号通过一个单向摇杆的电位器实现,两端接3.3 V电压,摇杆处于不同位置时会输出0~3.3 V电压,处于中间位置时输出1.65 V电压。通过K60处理器的ADC模块采集这一电压信号,定义8位精度,得到一个0~255的数值,128为其中间位置的采集值。这样(127~0)即可表示控制车辆左转,(128~255)即可表示控制车辆左转,具体值与128的差值可表示控制车辆转向的幅度。遥控器通过NRF24101向主控系统同步传输这一8位精度的AD转向信号值。
4.3控速输入
控速信号的输入与转向信号的输入方式相同,也通过一个单向摇杆的电位器来实现,两端也接3.3 V电压,通过K60处理器的另外一路AD通道采集这一电压信号,定义8位精度,得到0~255的数值,128为其中间位置的采集值。这样(127~0)即可表示控制车辆前进,(128~255)即可表示控制车辆倒退,具体值与128的差值可表示控制车辆运行的速度。通过NRF24101,向主控系统同步传输这一8位精度的AD控速信号值。

")



