・上一文章:新能源车辆暖风和空调系统浅析(上)
・下一文章:CL125T-3水冷摩托车发动机温度上升过快
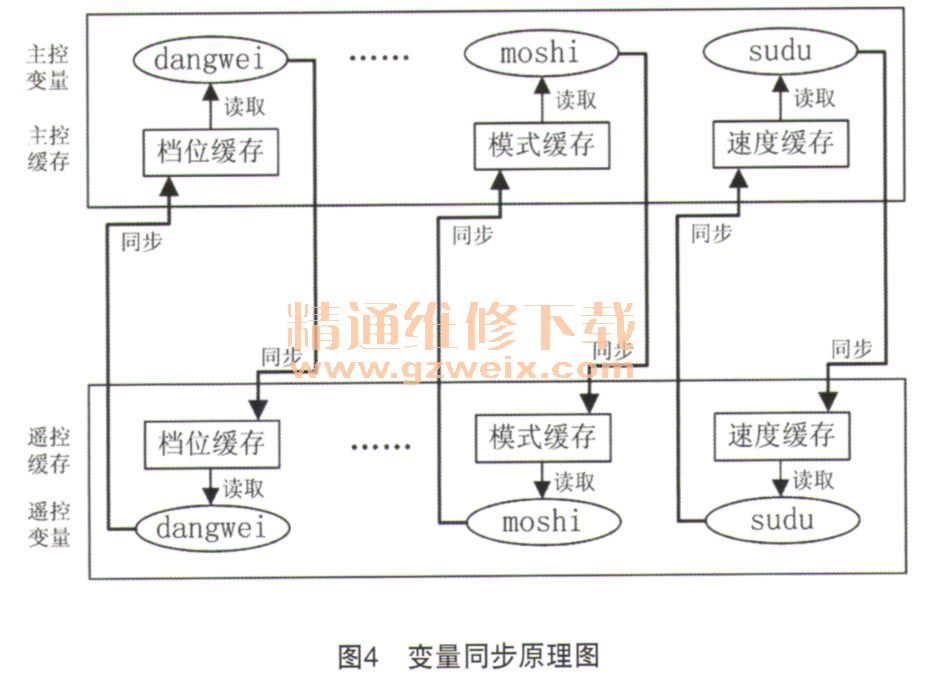
5 无线回传与安全性设计
信号的无线回传通过变量同步的方法实现。变量同步即是主控系统与遥控系统双方彼此定义相同的变量与相同的变量缓存区,在需要收发信号时通过传递变量值到对方缓存区,通过读取缓存区的值并赋值给变量完成该信号的同步。同步如图4所示。
遥控的一个最主要目的是确保整个开发试验环境的安全,但在遥控系统与主控系统出现连接异常断开的时候,必须有紧急的安全保护措施。在本次设计中,遥控系统和主控系统分别检测对方是否发过来的信号,定义int变量duankai,在未接收到信号时,duankai++;在接受到信号时duankai清零。通过在主函数中运行这一子函数,经过调试,当duankai>50 000时,确定连接中断,主控系统在断开连接的情况下进行安全制动,遥控系统在显示器上显示断开连接状态。
6 总结
本次设计的无人驾驶试验车辆遥控与自主切换控制系统,应用干本课题组的无人驾驶车辆有关项目的研发与调试,稳定性良好,为无人驾驶汽车项目的研发提供了便捷的开发测试环境,并且保证了整个开发环境的安全。图5为无人驾驶汽车与无人配货车的试验图。

本次提供的无人驾驶试验车辆遥控与自主切换的实现方案对整个无人驾驶方向的研究具有重要的实践意义。

")



