・上一文章:载货汽车加装淋水器的危害分析
・下一文章:解析东风雪铁龙C5各电控系统电路图(三)
摘要:在电喷摩托车中,为了延长系统部件使用寿命,降低系统工作电流消耗,需要执行隔圈点火与喷油的控制,这将要求ECM模块不但要知道活塞在气缸中的位置,还要识别出曲轴相位。对于多缸发动机,可以使用凸轮轴相位传感器来结合CKP(曲轴位置)传感器计算活塞位置与曲轴相位。
在电喷摩托车中,为了实现进入气缸燃料的微粒化,降低尾气排放,提升发动机的动力性能,需要使喷油器能够在最佳的时间段执行喷油动作,减少燃油在进气道内停留的时间。同时为了延长系统部件的使用寿命,降低系统工作时的电流消耗,还需要执行隔圈喷油与点火的控制,这将要求ECM模块不但需要知道活塞在气缸中的位置,还需要识别出曲轴相位。对于多缸发动机,可以使用凸轮轴相位传感器来结合CKP(曲轴位置)传感器来计算活塞位置与曲轴相位。
对于单缸电喷摩托车,出于制造成本的考虑,往往并没有设置凸轮轴相位传感器。在国产单缸电喷摩托车中,目前仅有嘉陵生产的JH-600摩托车配置有曲轴相位传感器。对于四冲程发动机,起动运行时可以有3种方式来获得曲轴相位信息。
a) 通过进气行程与作功行程时的发动机转速对比方式来确定。在固定转速下,进气行程后紧随的压缩行程由于受到气缸压缩压力的影响,曲轴转速会略为下降。而在作功行程后紧随的排气行程,由于作功行程的惯性力影响,加之此时排气门处于打开位置,气缸内部不存在密封空间,曲轴转速将相对较高。这种变化在发动机转速越低时表现的越明显。利用这个转速波动的特性,ECM计算飞轮凸台经过CKP传感器的时间变化幅度,即可以分辨出发动机的曲轴相位。由于活塞上止点位置是预先设定在位于飞轮凸台上的某个凸台位置,所以ECM能够直接计算出此时是压缩行程上止点或排气行程上止点。
b)通过MAP(进气压力)传感器的电压信号变化来确定。MAP传感器测量的是进气道内的压力,在进气行程开始时,进气道内的压力开始下降形成负压,空气流在压差作用下被压人进气道和气缸(通常描述是空气被吸入),到进气行程下止点时,负压达到最大值。在随后的行程时间段内,进气道内的压力逐渐回升,直到排气行程末期达到最大,即负压最小值的时期。ECM通过MAP传感器的反馈电压信号同样可以得知某一活塞位置时曲轴的相位。
c)在点火线圈二次侧的高压信号上加一个偏压来确定,这需要二次侧的高压信号传感器来完成。在压缩行程上止点附近高压电击穿火花塞跳火时,由于受到气缸内压缩压力的影响,击穿火花塞间隙需要一个较高的电压。一般在怠速工况下,此时的击穿电压在8~12 kV左右。在排气行程上止点附近点火时,气缸内的压缩压力较低,气缸内的温度也相对较高,此时的击穿电压基本在3 kV左右。根据这一特征,ECM可以识别出点火时所处的行程位置。
单缸电喷摩托车中,ECM确定曲轴相位是通过MAP传感或CKP传感器进行的。不同车型使用的电喷系统,其确定控制程序也不相同。通过对电喷系统的数据进行分析,能够看到不同的控制策略。
五羊一本田佳御摩托车使用的是本田PGM-Fl电喷系统,该系统配置有MAP传感器。图1为此车型起动开始时的各路波形数据,第1次喷油是属于额外的起动加浓喷油,仅受起动信号控制,与曲轴是否运转无关。在随后的正常运转首次喷油时,通过MAP电压波形可以看到此次喷油发生在排气行程上止点位置,喷油开始的时间是写人ECM模块内部的固定程序。在喷油完成后的下一圈发动机运行时并未进行喷油,而是采取的隔圈喷油控制。当进入到第3次运转喷油时,ECM通过MAP信号识别出了曲轴相位,将喷油时间直接切换到了压缩行程上止点位置,这次属于是切换动作,所以出现一个连续喷油波形。当切换完成后,ECM继续执行隔圈喷油的控制,同时会逐次推移喷油开始时间,将喷油结束时间控制在进气门打开之前完成。与此同时,点火控制也从起动开始时的每圈点火切换成了隔圈点火,仅在压缩行程段进行有效点火。

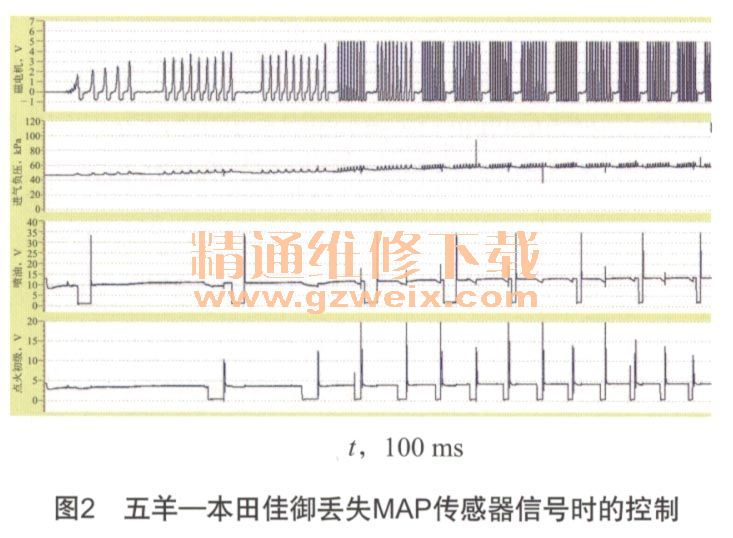
此车型丢失MAP传感器信号后,由于ECM模块内并未使用依靠CKP传感器来确定曲轴相位的程序,所以系统无法实现切换。ECM此时执行后备控制功能,只根据CKP信号来确定喷油与点火的几始时间,并不进行控制切换,波形测试上的表现为发动机进行的是每圈点火,参见图2所示。通过发动机运行时的动态数据波形可以发现,五羊一本田佳御车型的电喷系统是完全依靠MAP传感器信号来识别曲轴相位的,并不采用CKP传感器的信号。
五羊一本田优客与新大洲本田飘悦也是使用的本田PGM-Fl电喷系统,这2款车型并未使用MAP传感器,所以ECM根据计算CKP传感器的信号变化来确定发动机的曲轴相位。图3为此款电喷系统在发动机起动时的控制波形,起动时在起动加浓喷油后执行的是隔圈喷油控制,喷油开始时间在上止点附近位置。当发动机起动成功开始运行后,ECM计算出曲轴相位,将点火切换成隔圈点火。对于喷油时间,ECM则采取2种不同的控制方式。

在发动机起动时,曲轴首先是从静止状态开始转变为旋转状态,在CKP信号输入ECM后,ECM根据内存程序开始喷油,但是此时ECM还没有计算出曲轴相位,只是执行的固定程序操作。会出现2种情况,首次喷油开始在排气行程上止点附近或是压缩行程上止点附近。当ECM通过CKP传感器的输人信号计算出曲轴相位时,针对2种不同的喷油开始时间,执行不同的控制策略。

")



