一辆行驶里程约2.7万km、搭载274.920型发动机的2018款北京奔驰E300L轿车(CODE 808)。车主反映:该车倒车时该车没有倒车影像,且360°摄像头不工作。
故障诊断:驻车辅助系统有助于更快捷地找到停车位,并且可轻松驶入或驶出停车位。智能泊车系统先通过环境传感器定位并测量停车位,然后计算合适的路线并在驶入和驶出车位时为驾驶者提供辅助。通过视觉和声讯提示驾驶者车辆与障碍物之间的距离。智能泊车系统部分自动或全自动干预车辆驾驶和控制(加速或制动),同时遇到危险情况还会提醒驾驶者。
奔驰有多个不同版本的驻车辅助系统,从低到高依次是:后视摄像头(代码218);主动式驻车辅助系统,又叫带驻车定位系统(PARKTRONIC)的主动式驻车辅助系统(代码235);带后视摄像头的主动式驻车辅助系统(代码P44);带360°摄像头的主动式驻车辅助系统(代码P47)。
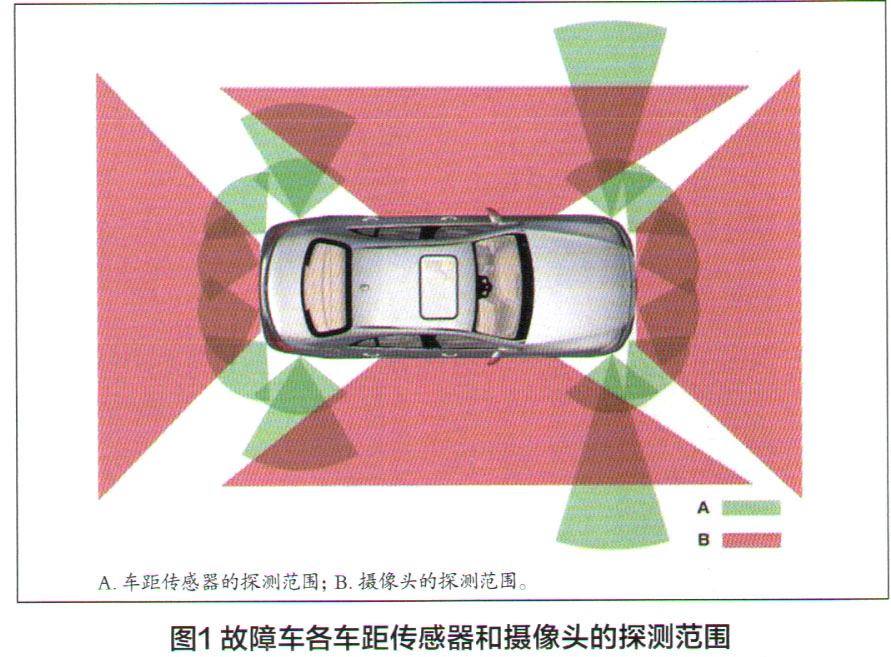
查看故障车的车籍卡得知,该车配备有CODE 501 360°摄像头、235主动式驻车辅助系统和P47高级驻车套件,各车距传感器及摄像头的探测范围如图1所示。
驻车定位系统(PARKTRONIC)是一款具有超声波的电子驻车辅助工具,在前后保险杠上各有6个车距传感器,用来监控车辆的周围环境,提供视觉和声讯警告来指示车辆与障碍物之间的距离,并且可以用驻车定位系统(PARKTRONIC)按钮打开或关闭。
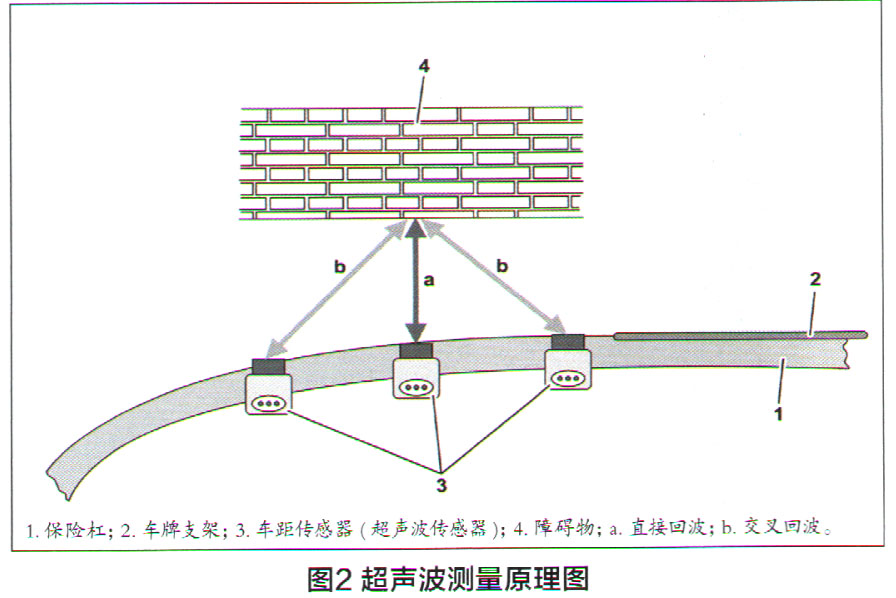
驻车定位系统(PARKTRONIC)基于超声波测量系统,系统控制单元直接促动距离传感器,传感器随后发出超声波,障碍物反射的超声波再次被车距传感器接收,驻车系统控制单元直接读入车距传感器的信号并对其进行评估。理论上区分为两种测量方式,一种是根据回波进行的直接测量,另一种是通过交叉回波实现的间接距离测量(图2)。由于车距传感器的探测角度较大,因此,通常也可能接收到来自邻近车距传感器的回波,这些回波被称作交叉回波。由于散射,在障碍物处会发生此情况,通过三角测量法,从车辆至障碍物的距离可以通过两个回波信号计算得出。此方法需要利用来自直接测量和交叉测量的信号传播时间,因此,信号传播时间长表示车辆与障碍物之间的距离较远。
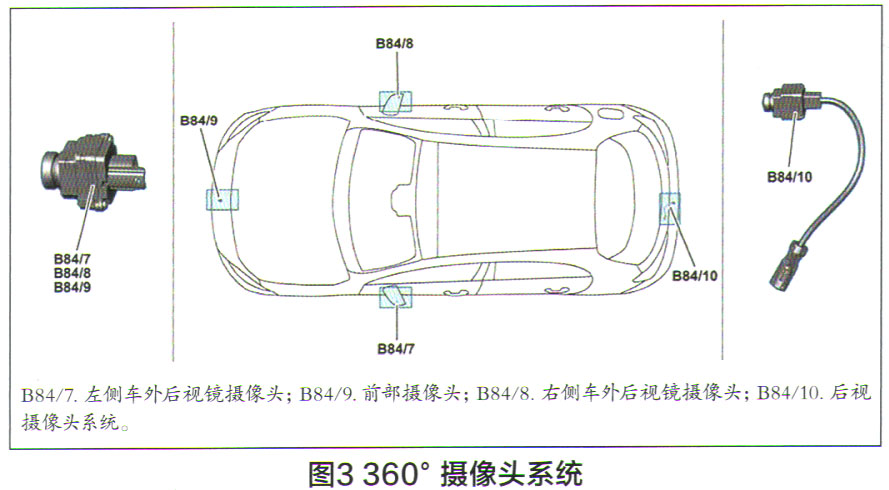
此车配有代码为P47的360°摄像头驻车套件。360°摄像头系统(图3)由4个摄像头组成,分别集成在车辆前端(散热器格栅中)和后端(释放拉手中)以及车外后视镜外壳中。
每个摄像头都是带有广角镜头,图像精度为100万像素,采用180°水平视角和123°垂直视角,由驻车系统控制单元提供5V工作电压,图像由驻车系统控制单元(N62)处理。
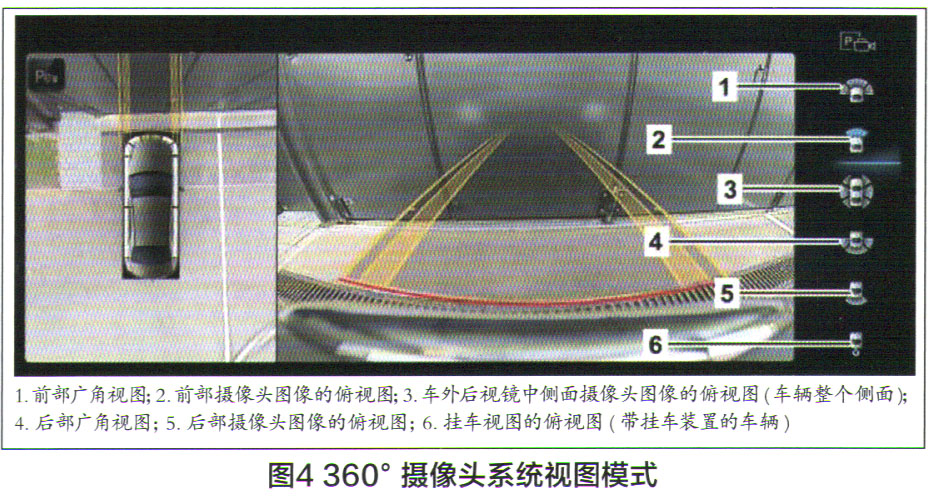
系统还会向驾驶员显示动态和静态引导线,从而根据转向角度形成车辆尺寸和行驶轨迹(行驶路径)。这些显示能够帮助驾驶员,特别是车辆挪移过程中,提供标记车辆拐角危险区域的附加元素。驻车或移车时,由4个单独摄像头获取的车辆周围区域图像组成的画面显示在多媒体显示屏上,显示了不同角度的视野,车主还可以根据需要选择不同的视图(图4)。