・上一文章:看图学会洗衣机故障分析与维修
・下一文章:奥迪Q5右侧日间行车灯闪烁
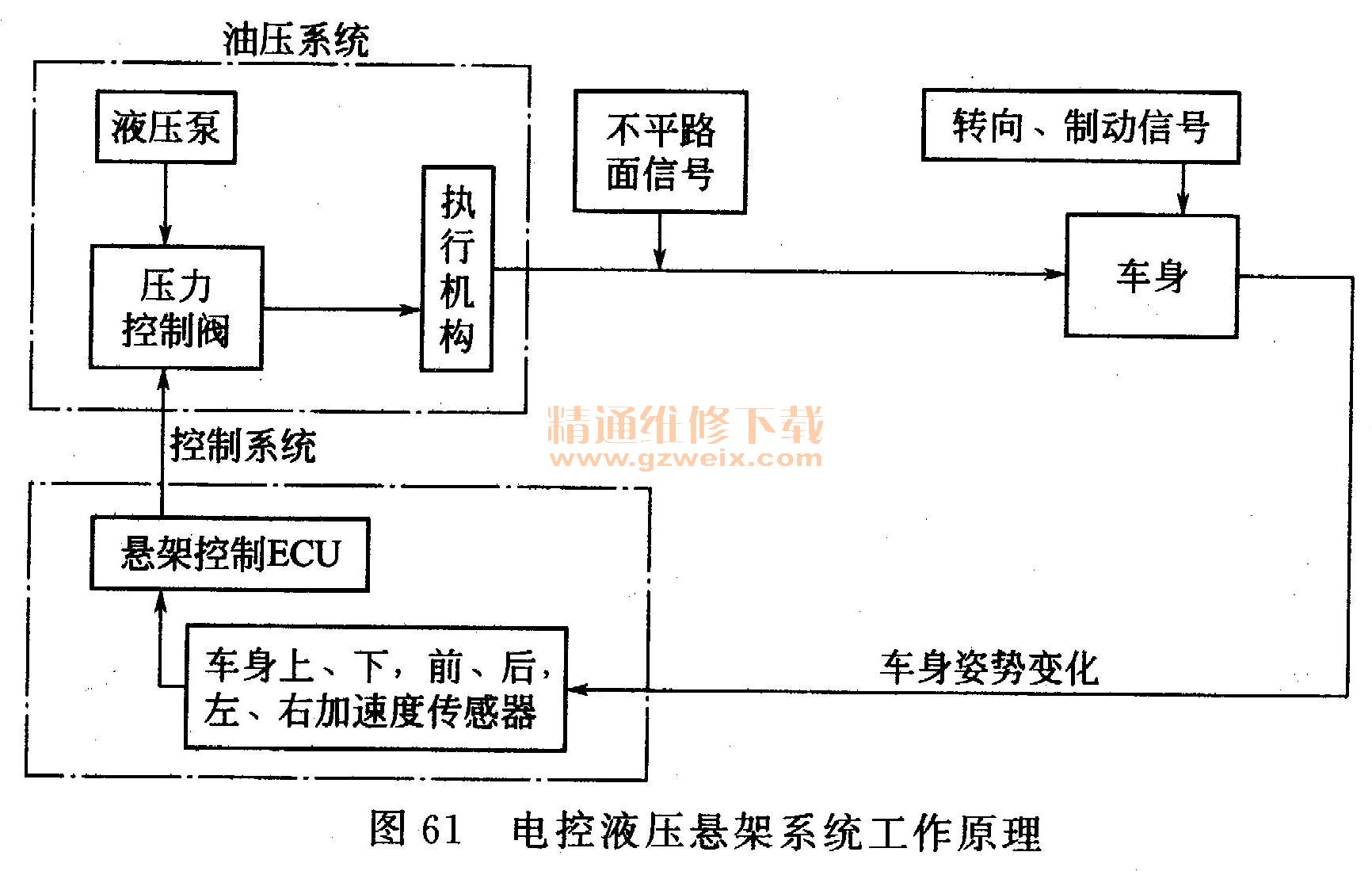
1.3.2车高控制系统
车高控制系统是在被动悬架的基础上加装水平高度调节机构形成的。它能够根据车身负载的变化自行调节,使车身高度不随乘员和载货的变化而改变,保证悬架始终都有合适的工作行程。
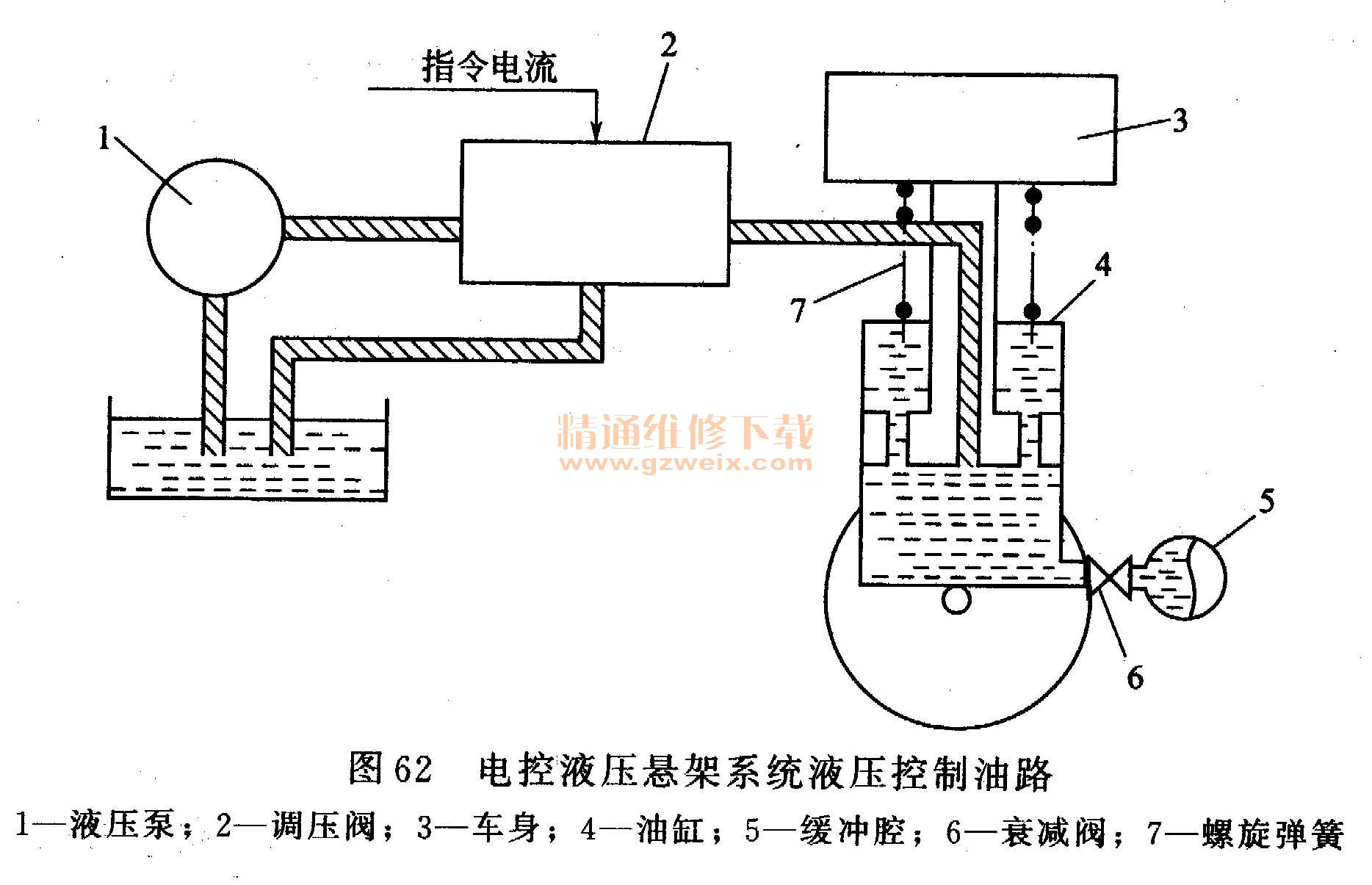
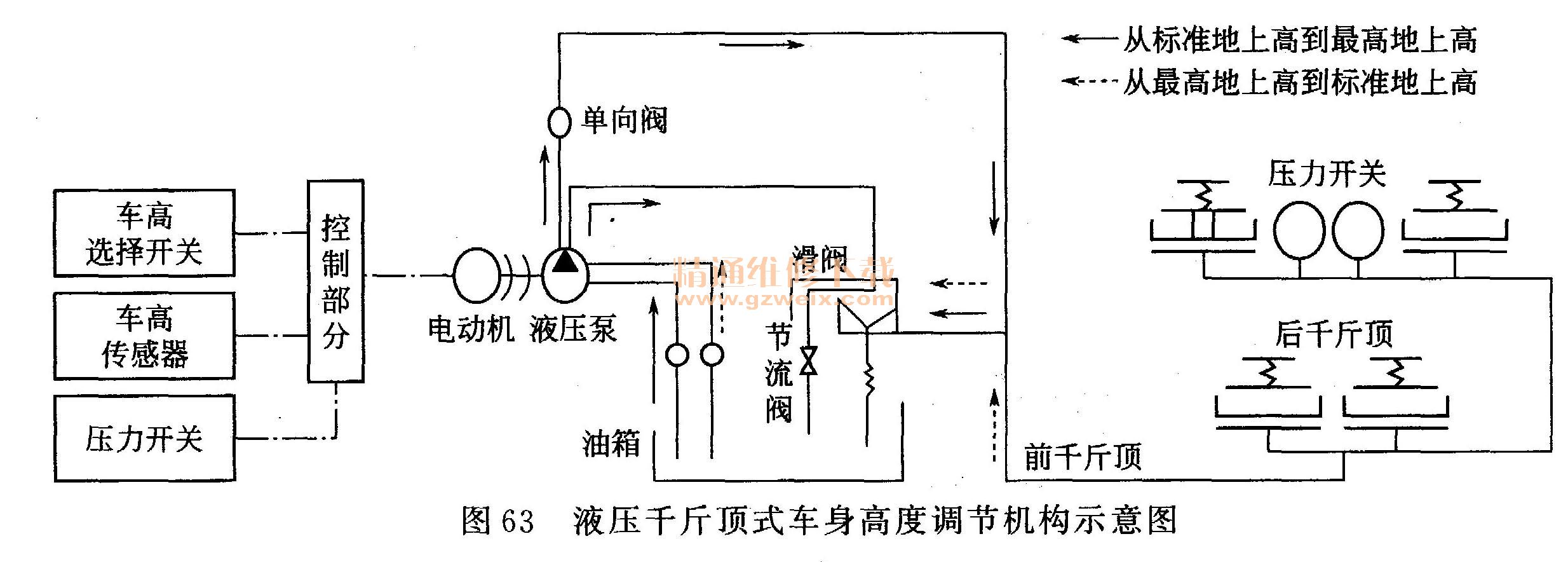
车高控制系统的执行机构通常由空气或油气弹簧组成,因而高度调整机构一般分为空压式与液压式两类。液压式又分为千斤顶式和液压气动式,可与普通弹簧并联使用。图6 3所示为液压千斤顶式车身高度调节机构示意图,控制系统根据车高选择开关及车速等信号调节车身高度。
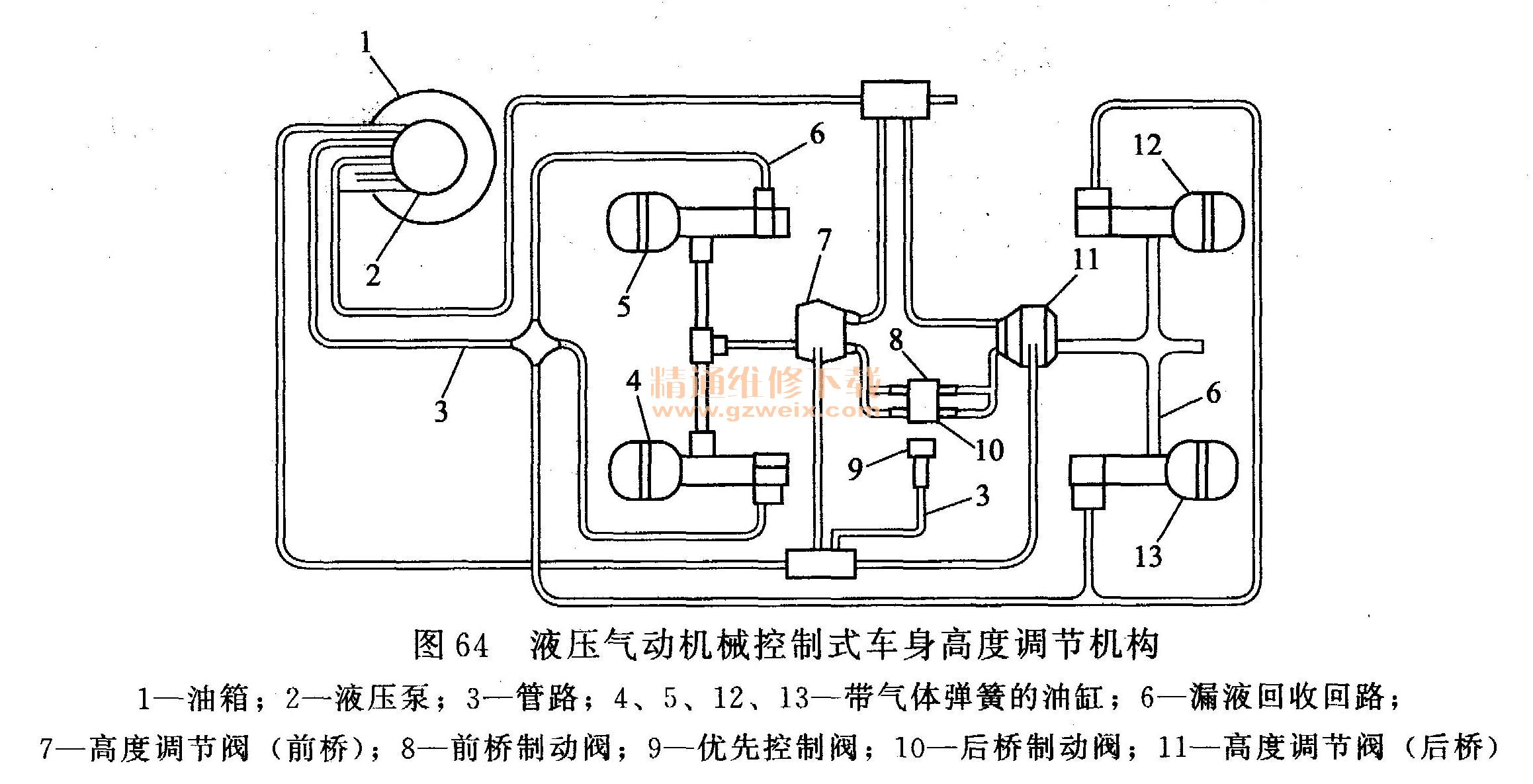
液压气动机械控制式车身高度调节机构,如图64所示。从液压泵输出的液压油经压力调节器存储于主储液筒中,通过调节阀将压力油供给油缸,进行车身高度调整。
由于车高控制系统的主要特点是车载变化不影响悬架工作行程,它对车辆性能改进的潜力是与车载变化范围成正比的。因此,这种悬架通常用于一些车载变化较大的重型货车和大型客车,也有些用于高级豪华轿车。
1.3.3自适应悬架系统
自适应悬架的刚度和阻尼特性可根据车辆的行驶条件进行自适应调节。当汽车在正常路面行驶时,悬架的刚度和阻尼应设置得较低,以保证乘坐舒适性。在急转弯、快速起动及紧急制动时,提高阻尼可减少车身姿态变化。在凸凹不平及坏路面行驶时,提高阻尼力能快速吸收车身的振动,并降低轮胎接地点力的变化,减少轮胎动负荷。
手动调节阻尼的悬架一般由驾驶员在仪表板上的“舒适”或“运动”两挡之间调整,也有的车辆根据行驶速度自动控制,低速时“软”,高度时“硬”等。
该系统采用了一个两级阻尼可调式自适应悬架。低阻尼用于车辆正常行驶工况,高阻尼用于车辆转弯、加速或制动工况。具体控制内容是侧倾控制,即转向角或转向速度一定时,提高阻尼力,以降低侧倾速度;抗点头控制,即通过制动油压或制动信号灯监测信号控制,当制动灯开关处于“ON”状态时,系统切换至高阻尼状态;振动控制,即道路状况由加速信号及车身相对高度信号识别,或用超声波传感器直接测量路面的状况,系统设置在低阻尼状态,以减少车身与车轴的振动,提高乘坐舒适性和轮胎接地性。
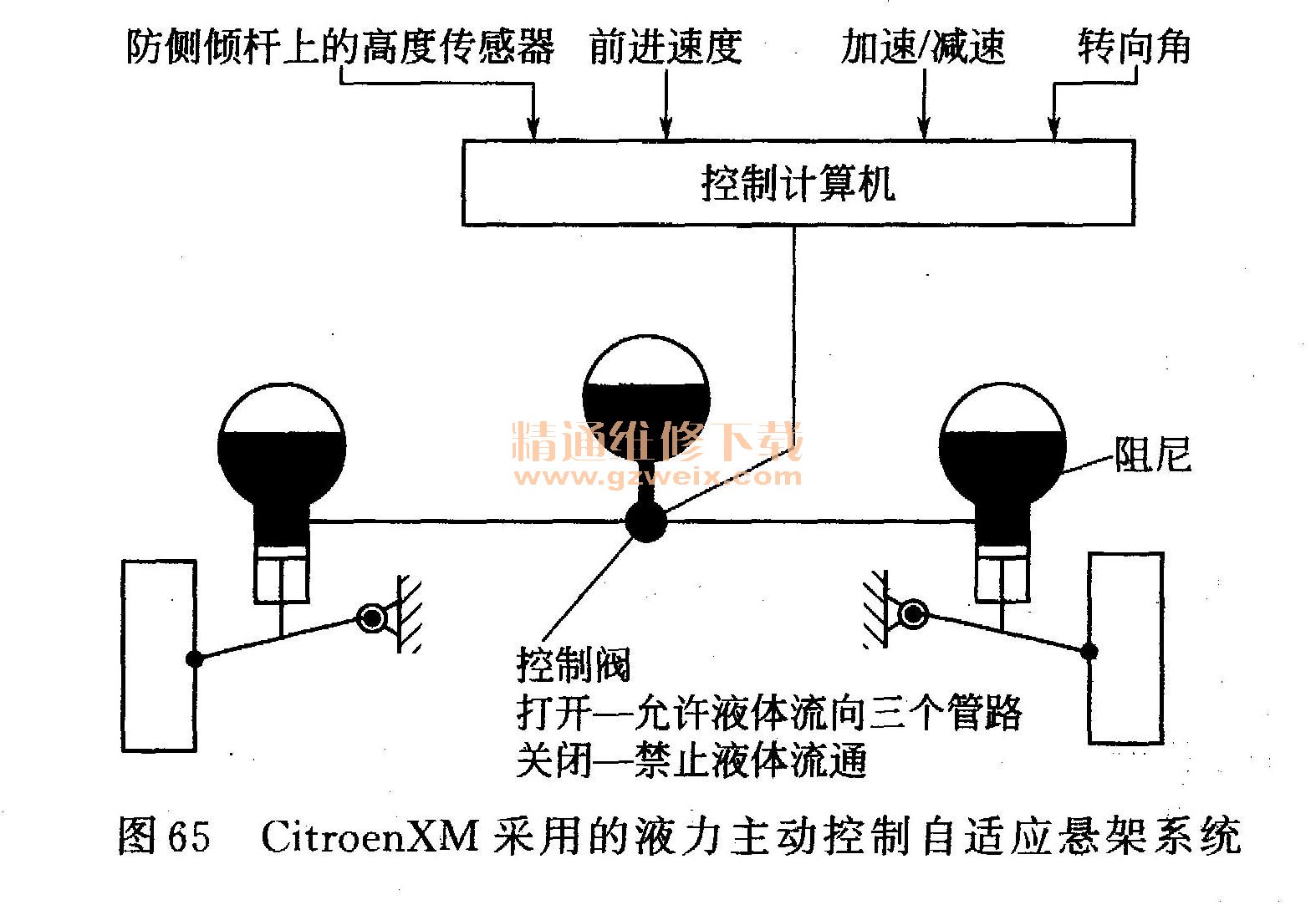
CitroenXM采用的液力主动控制自适应悬架系统,如图65所示。根据加速、减速信号,转向盘转角或悬架运动、车速等信号使悬架变为高阻尼状态,阻尼由低到高的切换过程通常需几分之一秒。当恢复正常行驶时,将系统再切换回软设置。当系统由硬设置切换到软设置时,通常需要一定时间的滞后。高速行驶时,车高下降15mm,以增加稳定性;坏路面行驶时,车高上升15mm,以提高舒适性。在正常行驶条件下的低阻尼设置时,中心控制阀打开,允许液体流入三个油气弹簧。此时液体可横穿车辆,这样除了液体在管路内由于塑性黏滞而产生的反作用力外,系统几乎无侧倾刚度。在坏路面或车辆转弯、制动时的高阻尼设置情况下,控制系统的中心阀关闭,这时每一悬架单元以传统的被动悬架形式单独作用。
上一页 [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] 下一页
")
")
")
")

