・上一文章:看图学会洗衣机故障分析与维修
・下一文章:奥迪Q5右侧日间行车灯闪烁
1.3.4汽车主动悬架液压比例控制系统
目前采用液压作动器的悬架系统中所用控制阀大部分为伺服阀。仅有少部分为高速开关阀。伺服悬架系统动态特性虽好,但造价昂贵;高速开关阀可降低整套悬架系统的造价,但其动态特性较差,可控频率在2Hz以下。鉴于伺服系统维护技术难度较大以及制造成本又高的原因,工业领域中的许多用户提出来要用较为廉价的比例元件替代电液伺服元件。与此同时,电液比例技术的迅速发展以及比例元件性能的不断提高也为满足上述要求提供了可靠的技术保证。
(1)比例悬架系统原理
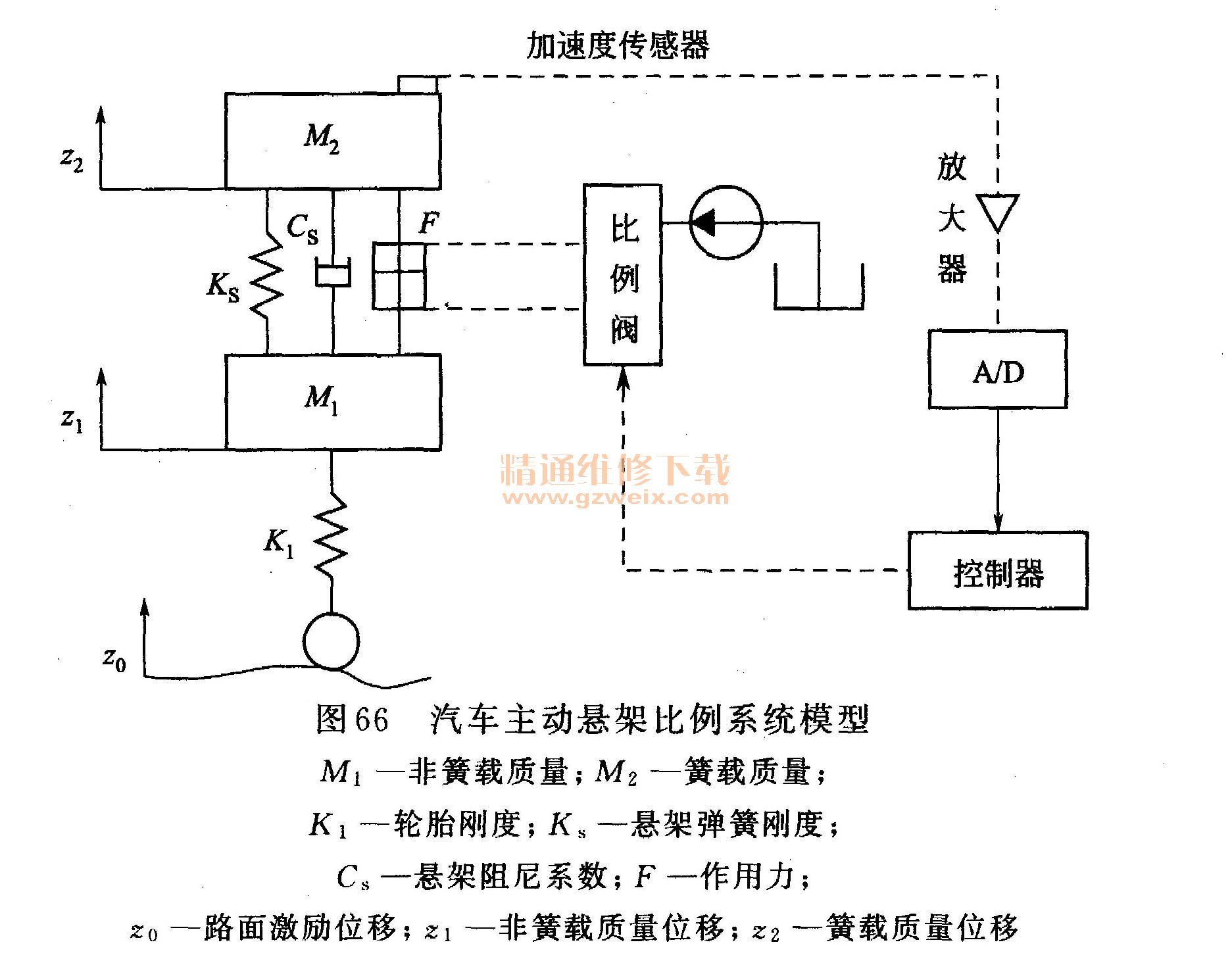
比例悬架就是在被动悬架系统的基础上加装一个可以产生作用力的动力装置。其自由度模型,如图66所示。动力装置由液压油源、液压缸和电液比例阀组成。
系统作用过程是,路面有不平度输入Z0经轮胎K1传递到非簧载质量M1,然后再由M1经悬架刚度Ks与悬架阻尼Cs传递到簧载质量M2,使簧载质量M1产生加速度;.此时液压主动悬架控制系统通过加速度传感器测得其加速度信号。再经电荷放大器将所得电信号放大以使其与控制器的输入电信号幅值(电压或电流)相匹配;最后,由控制器对所测得的电信号按照事先设计好的控制规律进行处理。得到的对应输出控制量传给比例阀。比例阀输出相应的流量来控制液压缸。使其作出相应的动作以改变簧载质量的加速度。从而让加速度在期望的范围内波动。理论上,这一动力装置产生的作用力可根据需要在极短的时间内由零变化到无穷大。但作用力越大、速度变化越快。需要液压系统的工作压力就越高,系统消耗的能量也就越大。
(2)系统参数
某型桑塔纳轿车主动悬架的结构参数为(图66),M1 = 49kg, M2 = 300kg,Ks=20000N/m,K1=17000N/m,Cs=1317N·s/m。
技术要求是,执行器频宽ωc15~20Hz;行程H=±10cm;活塞杆最大随动速度v max≥0. 4m/s。设定双活塞杆液压缸输出的最大作用力为6000N、液压缸的最大伸出速度为Vmax≥0 5m/s、液压缸有效行程L = 20cm、液压缸内径为40mm、活塞杆直径为22mm、液压缸内泄漏系数CL≈-0、有效体积弹性系数E=700MPa=7×10 8Pa,则可计算出液压缸工作面积。
A =3. 14 (0. 042-0.0222)/4=8. 76 ×10-4 m2
负载工作压力:
PL=6000/A= 6000/(8. 76×10-4)= 6. 84MPa
系统所需流量:
qmax = VmaxA=0.6×8.76 ×10一4 × 103 ×60=31.53L/min
考虑系统流量损耗,设定系统流量为40L/min,则液压缸工作容积:
Vt =A× L=8. 76×10一4 ×20× 10一2=1. 75×10一4 m3
液压缸-负载固有频率:

工程设计实践证明,f 0<4Hz只适合于静态系统。F0>30Hz时,动态特性较好,由此可见液压缸尺寸合适。
(3)液压系统各元件
①油源。负载工作压力约为7MPa。考虑到系统压力损失及摩擦力的存在,且液压阀工作在较大压差下,因此将泵站油源的供油压力设为9 MPa。
②传感器。测量系统加速度传感器,用于测量簧载质量的加速度。根据控制工程经验,检测元件的精度必须高于控制系统控制精度的4倍以上,其响应速度则为系统频宽的8~10倍以上。
③比例阀。本系统不仅要求控制方向,而且要求控制流量,并且动态性能要求较高,所以选用博世型号为0811404036的高性能比例方向控制阀。该阀额定流量QW = 40L/min、最大输入电流2. 7A、配套放大器输入信号U=0~±10v、滞环≤0. 2%、重复误差≤0.1%、温漂≤1%。
1 .3.5基于模糊控制与电动静液压作动器的汽车主动悬架
悬架,作为汽车的一个组成部分,隔离来自路面的冲击以保持乘坐舒适性,同时控制车体的姿态以保持汽车安全、稳定行驶。传统被动悬架是有局限性的,因为它的部件只能存储或消耗能量,这不能满足不同路面情况下的汽车舒适性和操稳性要求。主动悬架采用液压或气压作动器产生控制力。
主动悬架要求将传感器安装在汽车的不同点来测量车身、悬架系统或非悬架质量的运动状态,然后将传感到的信息输入到控制器,由控制器产生指令使作动器形成精确的控制力。
一种基于电动静液压作动器EHA (electro hydrostatic actuator)技术的汽车主动悬架结构已被开发。电动静液压作动器EHA由伺服控制的电动机、活塞泵以及2个管路组成。
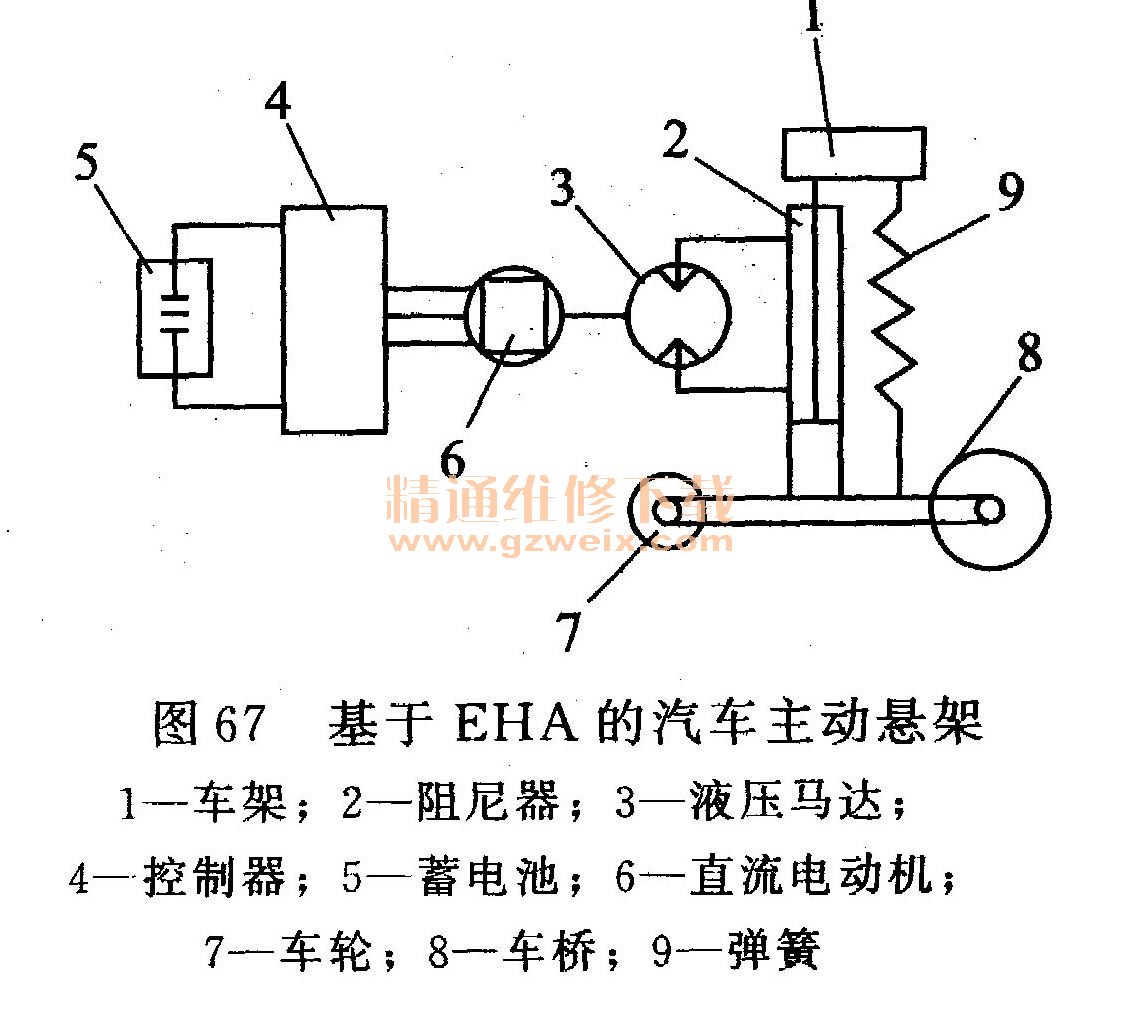
基于EHA的汽车主动悬架基本结构,如图67所示系统主要包括弹簧9和阻尼力可变的阻尼器2部分,其中阻尼器由液压缸2、液压马达3、控制器4、直流电动机6组成。具体连接关系,平行安装的液压缸2和弹簧9分别与车架1和车桥8垂直相连,阻尼器2再与液压马达3通过液压管路连接,液压马达3后通过联轴器连接一个直流电动机6,直流电动机6连接一蓄电池5,在直流电动机6和蓄电池5之间安装控制器4。
采用EHA的汽车悬架系统不采用液压阀件,结构简单,成本低,工作范围宽。
有2种类型的EHA作动系统。一种EHA系统是泵的排量是可变的,电动机转速是不变的;另一种EHA系统是泵的排量是恒定的,电动机转速是不变的。
通过调整无刷电动机转速和方向,从而控制液压缸的阻尼力,实现主动悬架功能。
模糊控制器已成功地用于线性和非线性系统的控制。与传统控制器相比,模糊控制器不要求建立系统的数学模型,而且能够容易地解决控制系统的非线性和不确定性问题。
用于EHA汽车主动悬架的模糊控制器有2个输入:车体加速度与参考加速度的偏差;偏差变化率。模糊控制器输入的语言变量为车体加速度偏差(E)和偏差变化率(EC),输出的语言变量为理想的控制力(U) 。
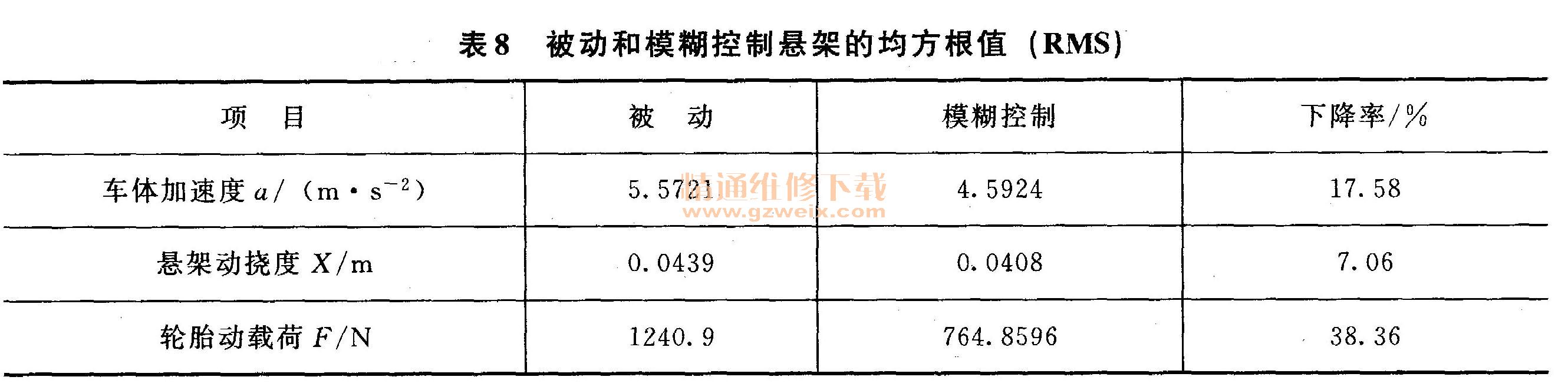
表8给出了汽车模糊控制主动悬架与被动悬架的车体加速度、悬架动挠度、轮胎动载荷的均方根值。车体加速度、悬架动挠度、轮胎动载荷是汽车动态性能的主要评价指标。结果表明,基于EHA的模糊控制主动悬架降低了车体加速度、悬架动挠度、轮胎动载荷大小。通过模糊控制,汽车车体加速度下降了17.58%,轮胎动载荷下降了38. 36%。
上一页 [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] 下一页
")
")
")
")

