・上一文章:看图学会洗衣机故障分析与维修
・下一文章:奥迪Q5右侧日间行车灯闪烁
1 .3.6日产无穷Q45轿车采用的液压式主动控制悬架系统示例
(1)液压式主动控制悬架的结构和工作原理
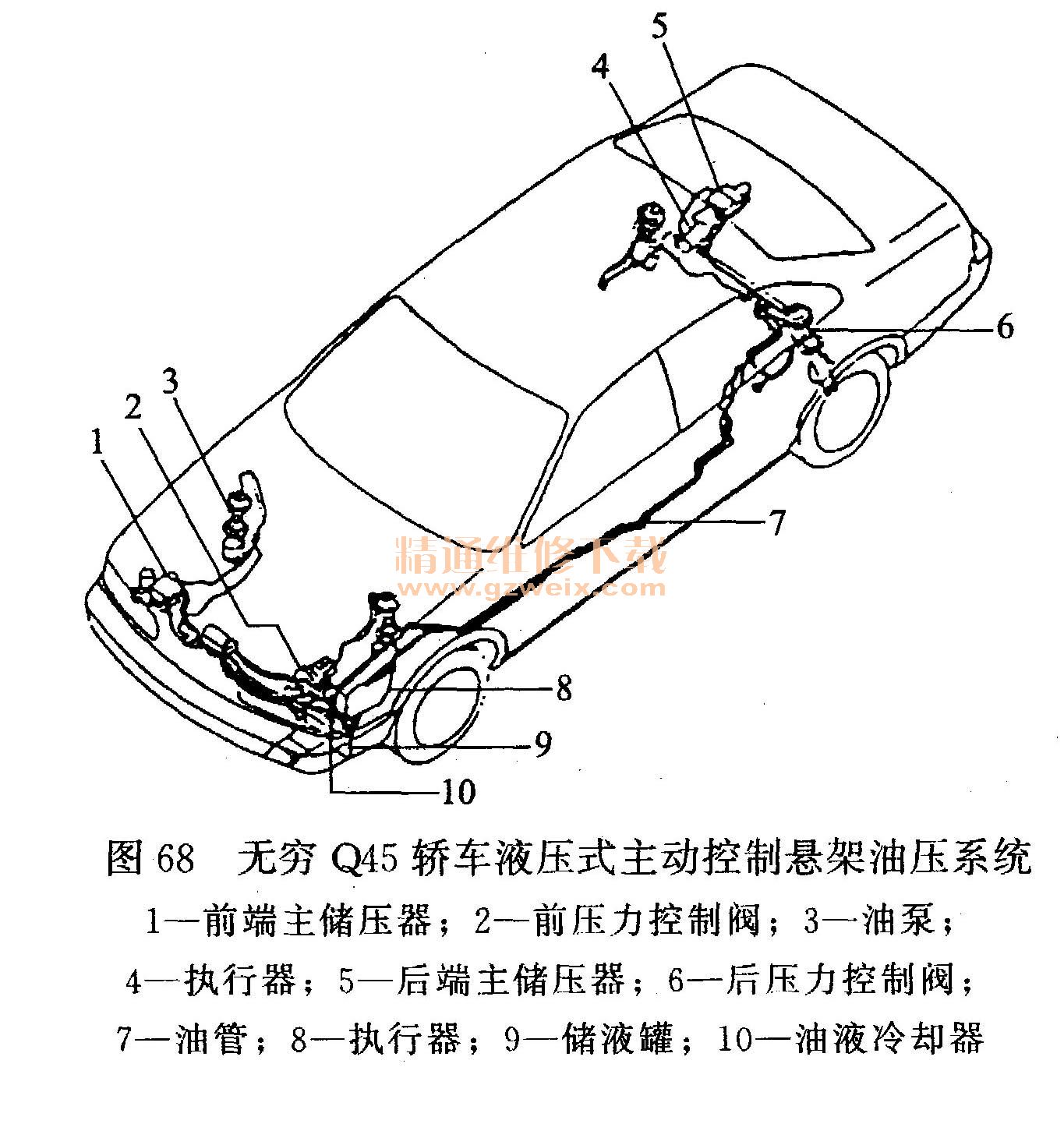
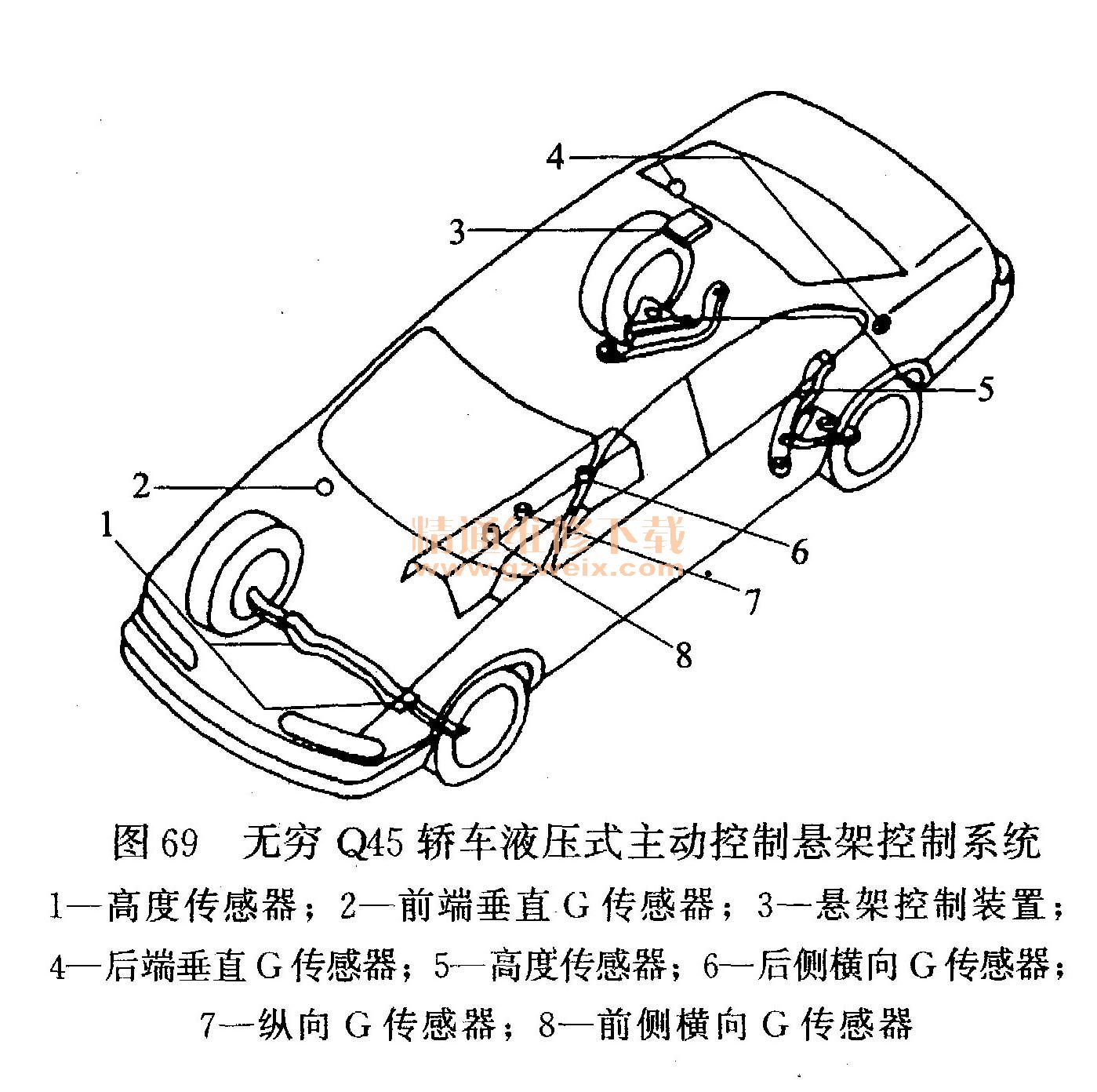
日产无穷Q45轿车采用的液压式主动控制悬架系统(FAS)主要由油压系统和控制系统两部分组成。油压系统和控制系统的组成及布置,如图68、图69所示。
系统根据G传感器的输出信号,控制各车轮执行器的油压,抑制车身姿势的变化,也降低来自路面的冲击。
系统由油压系统和控制系统构成。油压系统主要由储油箱、油泵、油泵储压器、组合阀、主储压器、压力控制阀及执行器组成(图68);控制系统主要由4个车身高度传感器(4个车轮上各一个)、3个垂直G传感器(一个在汽车前端,二个在汽车后端)、2个横向G传感器(在中间车架上)、1个纵向G传感器(也在中间车架上)、电子控制装置组成(图69)。
①油泵总成。作为系统动力源的油泵,其结构如图70所示。
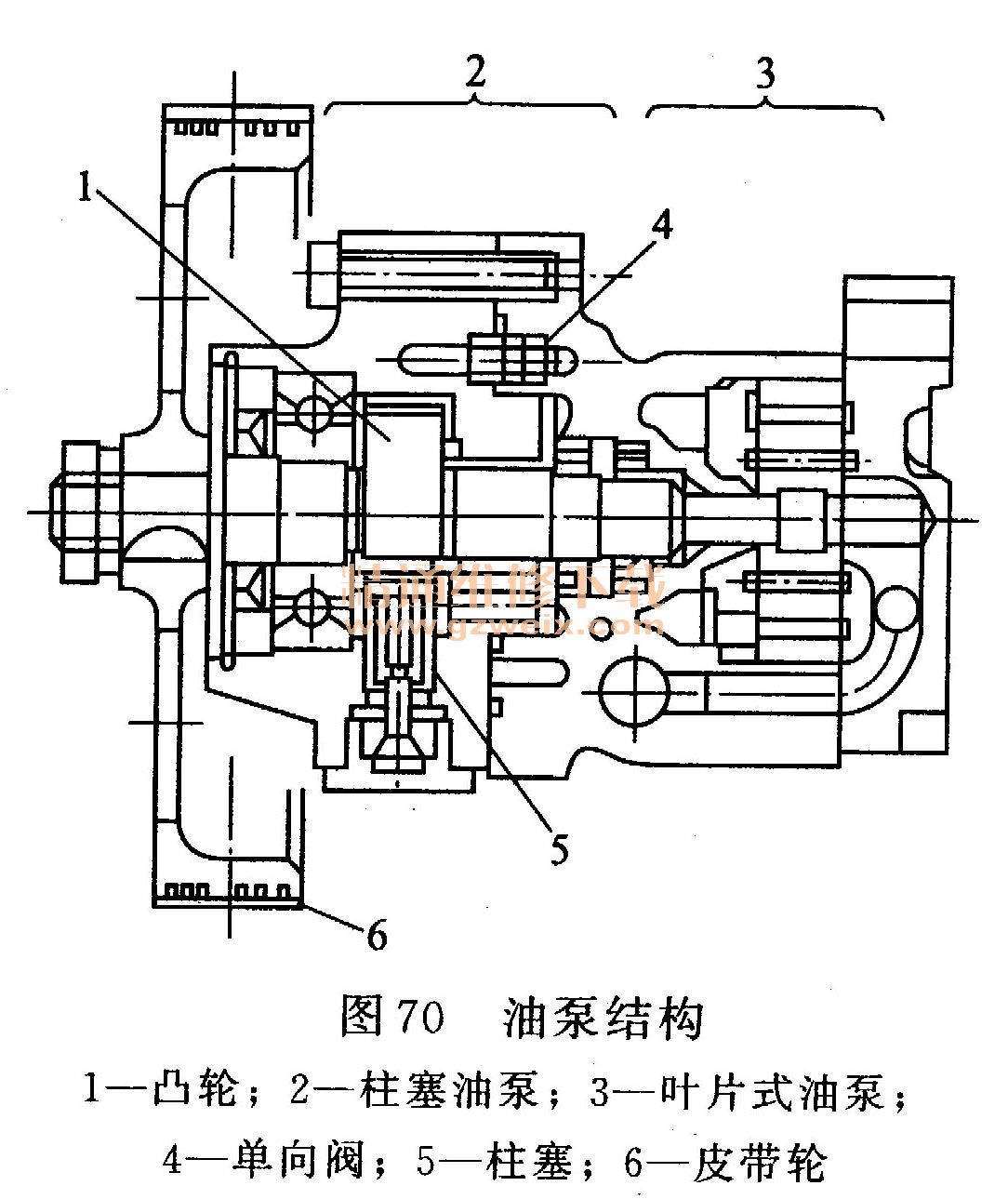
油泵总成为一串联式结构,前端为一柱塞泵(供悬架系统用),后端为一叶片式油泵(供动力转向系统用),两个油泵由一根轴驱动。
悬架系统使用的是一流量控制型柱塞油泵,具有耐高速旋转及高压、能量损失少的特点。油泵沿圆周布置有7个柱塞,在驱动轮上的凸轮驱动下往复运动,为降低油泵输出油压的脉动,油泵内设有金属折箱型储压器。
②主储压器。主储压器的构造如图71所示。
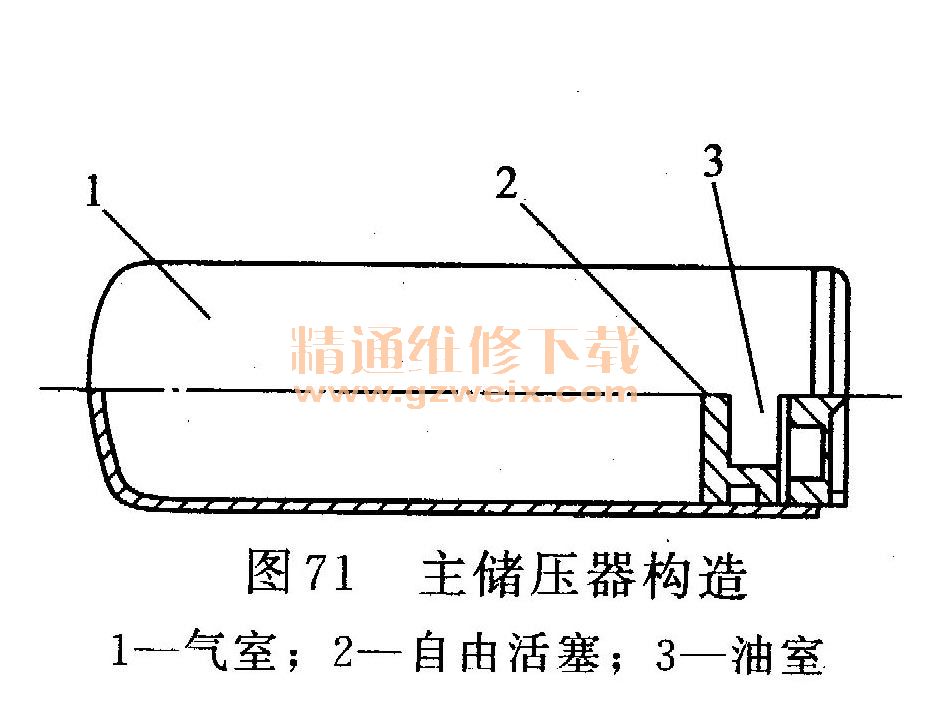
主储压器存储来自组合阀的油压,当执行器一时需要大流量油液时进行补充,在发动机熄火时保持车身高度。主储压器一般为自由活塞型储压器,要求高压、大容量、长时间可靠工作。
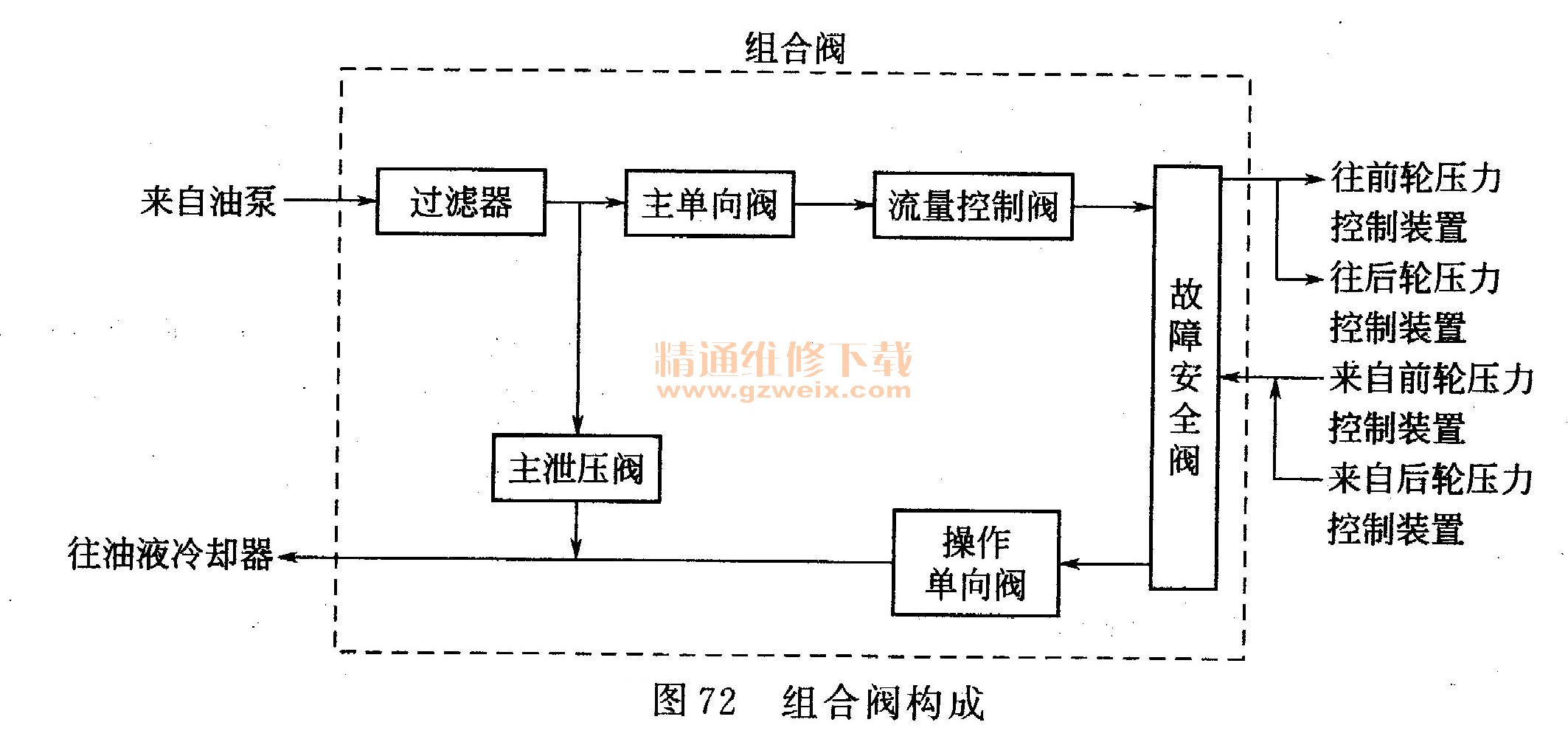
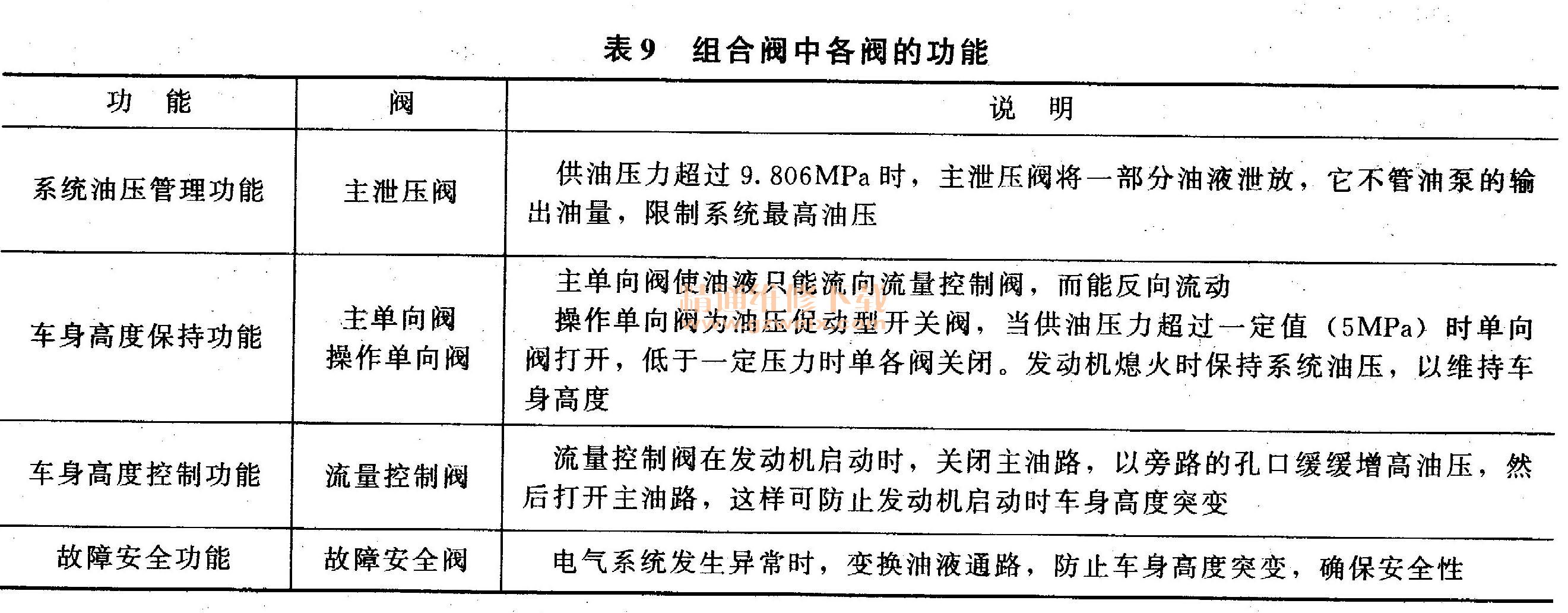
③组合阀。组合阀用于对油压系统的基本油压控制。它是由多个不同功能的阀组合在一起的多功能阀装置(图72)。组合阀中各阀的功能见表9。
④压力控制阀。压力控制阀和执行器的结构,如图73所示。
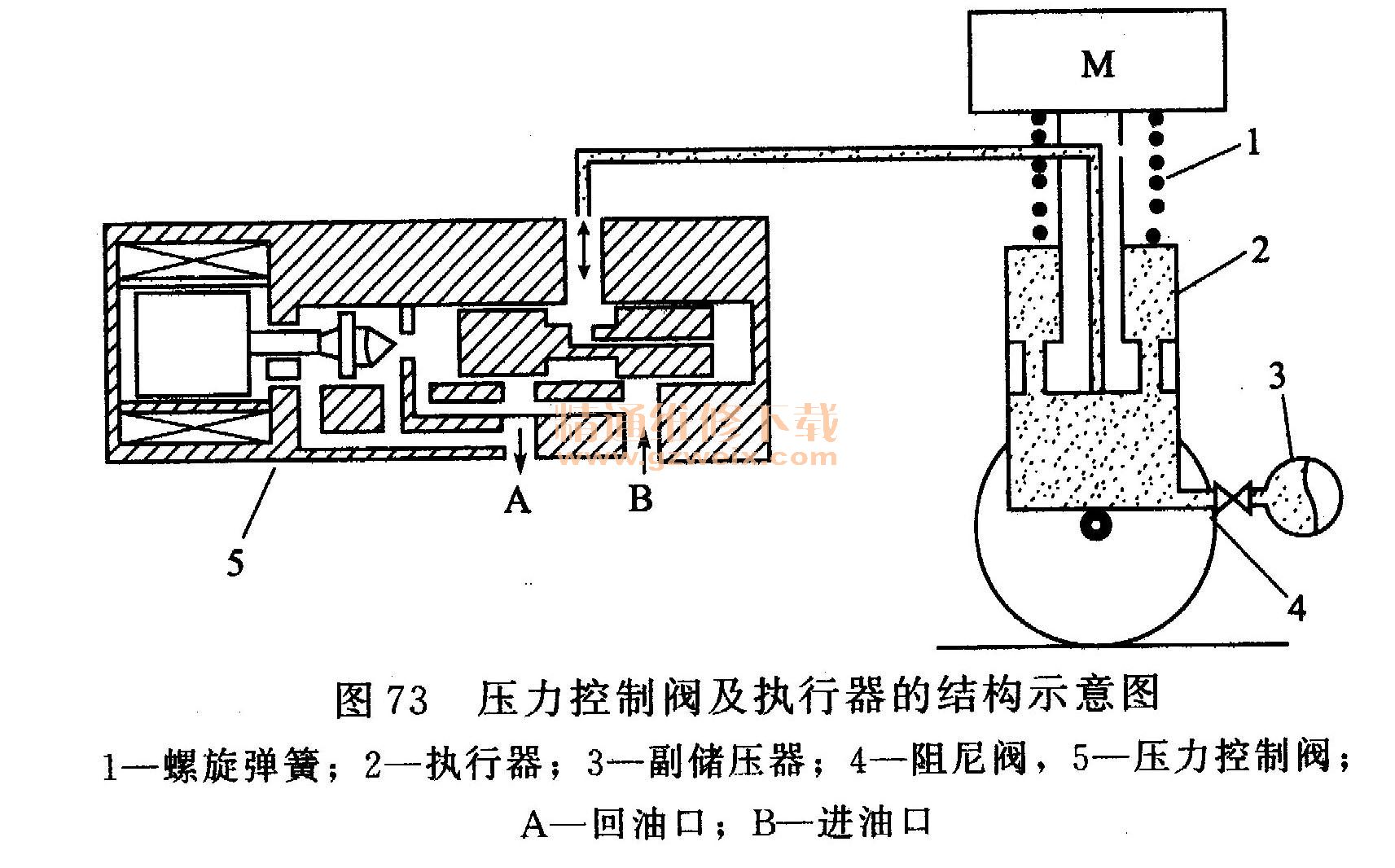
系统中有两个压力控制阀,均是与飞机上使用的伺服阀具有同等高精度、高响应性的导向比例电磁压力阀,它们分别位于汽车前端和后端,根据系统控制装置的控制信号,压力控制阀控制各轮执行器的油压。
压力控制阀主要有两个功能。
a.主动控制功能。根据控制的输入信号,控制控制口(送至执行器)的压力,以控制车身姿势。
b.被动阻尼功能。路面输入的影响使执行器内的压力发生变化时,将执行器内压力经控制口反馈到阀杆,以产生最佳的阻尼力。
⑤执行器。执行器的结构参见图73。执行器由液压缸、副储压器和阻尼阀组成。由于悬架系统使用了辅助螺旋弹簧,降低了支承车身所需的系统油压,减小了动力损耗。
为吸收、衰减弹簧下的高频振动,在底部设有副储压器和阻尼阀。
⑥G传感器。悬架系统使用了六个G传感器,用以检测汽车在各种行驶条件下产生的车身加速度,它们是一个纵向G传感器、两个横向G传感器和三个垂直G传感器。这些G传感器均为钢球位移检测型传感器,可向电子控制装置提供对应于车身纵向力、横向力和垂直力的模拟输出信号。
⑦电子控制装置。电子控制装置包括两个高速16位微处理器(MCU 1和MCU2 ),运算速度非常快(图74)。

微处理器MCU1处理来自G传感器的信号,并把控制信号输送到压力控制阀的驱动电磁线圈内,微处理器MCU2处理来自高度传感器等的信号,并把控制信号输送到压力控制阀的驱动电磁线圈内。MCU1与MCU2一直相互联系,一方发生异常时,就把信号输入故障安全回路,使故障安全阀动作,以确保安全性。
(2)系统的控制功能
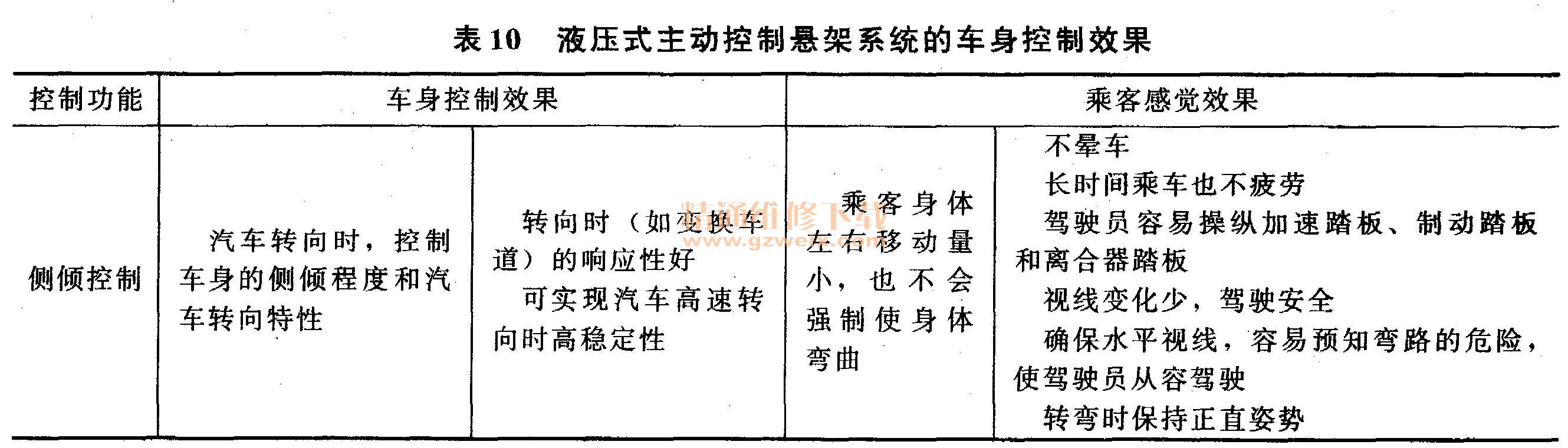
①侧倾控制功能。汽车转弯时,在离心力作用下车身欲发生侧倾,由横向G加速度测得此离心力,系统控制装置根据此离心力的大小,按比例增加外侧车轮悬架的液压,降低内侧车轮的液压,以抵消汽车离心力,防止车身侧倾。
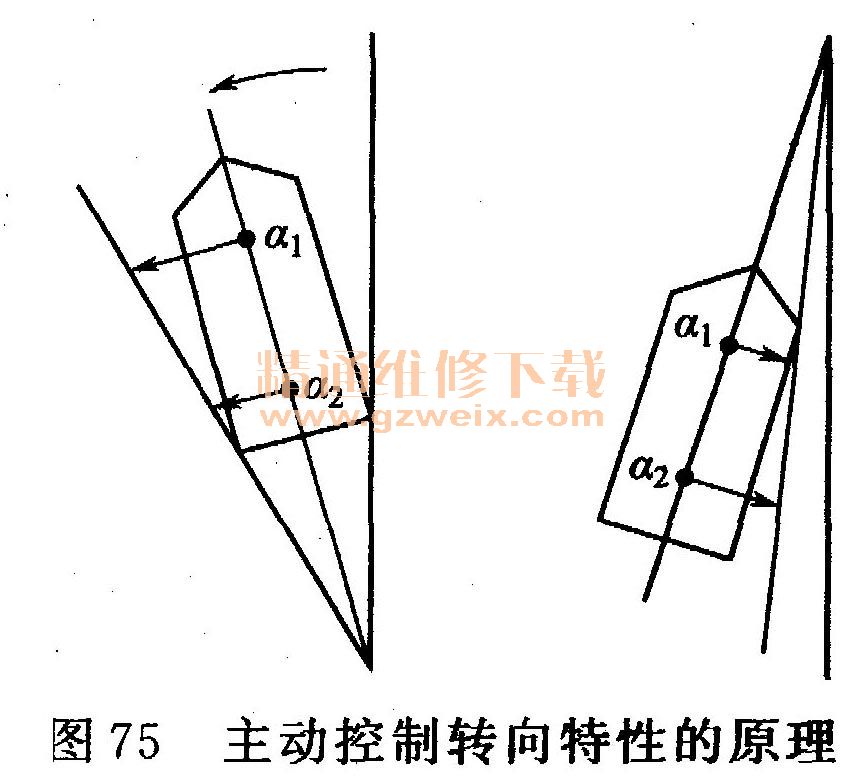
侧倾控制时分别控制前轮与后轮执行器产生的作用力,如果假设抵消车身侧倾的总的作用力为100% ,如果增大前轮作用力的分配,会造成汽车转向不足;如果增大后轮作用力的分配,会造成汽车过多转向,为实现对汽车转向特性的主动控制,系统采用了前、后两个横向G传感器分别测量汽车前、后端的横向加速度,用前端的横向加速度a1控制后轮执行器产生的作用力,用后端的横向加速度a2控制前轮执行器产生的作用力。这样,当汽车高速急转向时,汽车的瞬时转向中心在汽车后方,a1值大于a2值,侧倾控制时增大后轮执行器产生的作用力,可以改善汽车的回转性能;当汽车回正时,汽车的瞬时转向中心在汽车前方,a2值大于a1值,侧倾控制时增大前轮执行器产生的作用力,改善汽车的回正性能(图75 ).
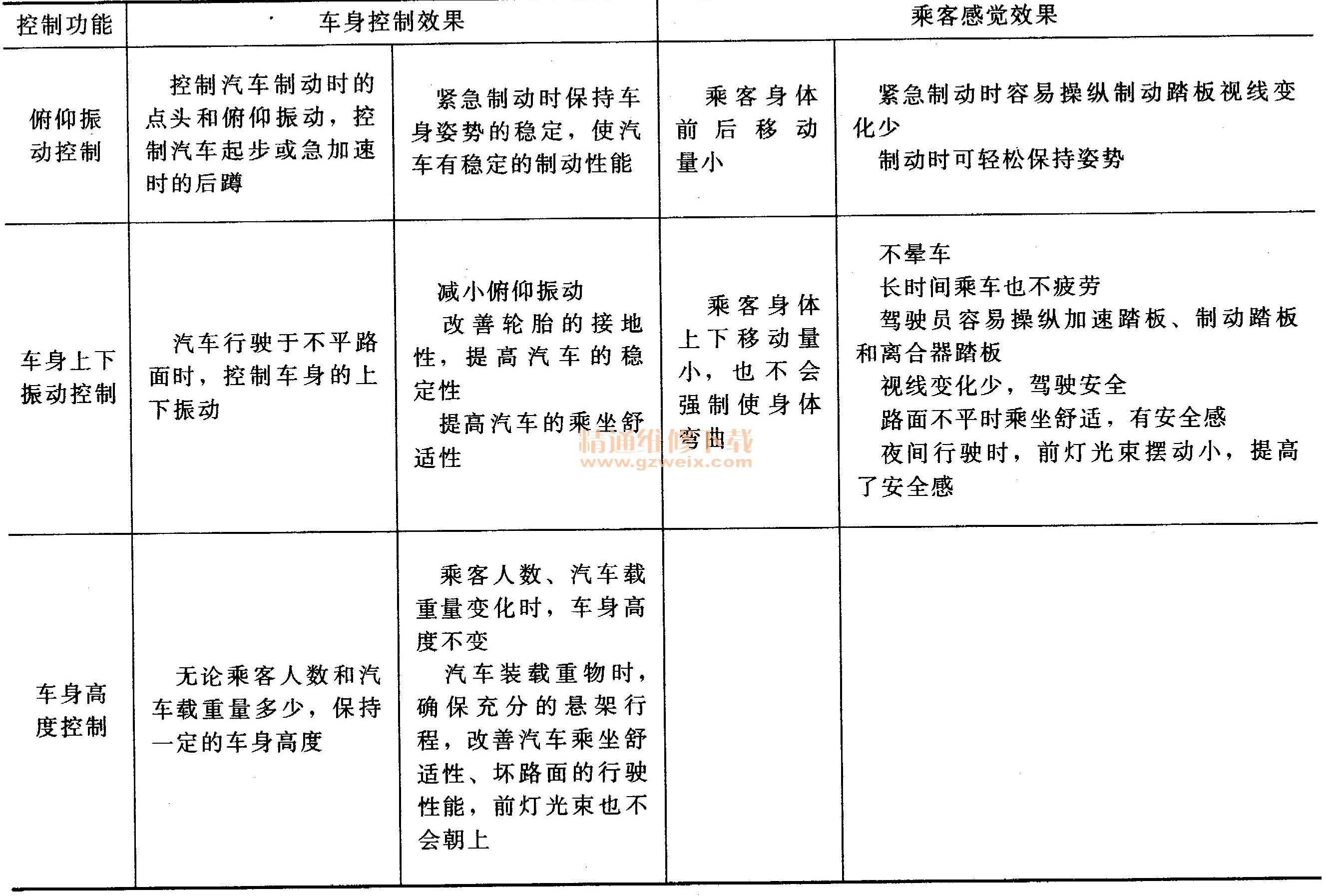
②俯仰振动控制功能。汽车制动时,汽车产生向前的惯性力,系统通过纵向G传感器测得汽车向前的惯性力,系统控制装置则根据此惯性力的大小,按比例增大前轮执行器产生的作用力,降低后轮执行器产生的作用力,以抵消惯性力,控制车身的俯仰振动。汽车起步时的控制过程与上述相反。
③上下振动控制功能。当汽车行驶于不平路面时,来自路面的冲击使车身发生上下振动,根据车身上下振动的绝对速度,系统控制各车轮执行器产生的作用力,以抵消来自路面的冲击。此绝对速度可将汽车垂直G传感器测得的车身垂直方向的加速度积分求得。此控制方式采用的是前述的天棚阻尼器控制理论。
④车身高度控制功能。根据各车轮部分的高度传感器测得的车身高度变化信号,系统控制装置自动使车身高度维持为一个定值(不管载荷如何变化)。也可以通过手动操作使车身高度增加20 mm,以避免汽车行驶在坏路面时车身与路面相碰。液压式主动控制悬架系统的车身控制效果见表10。
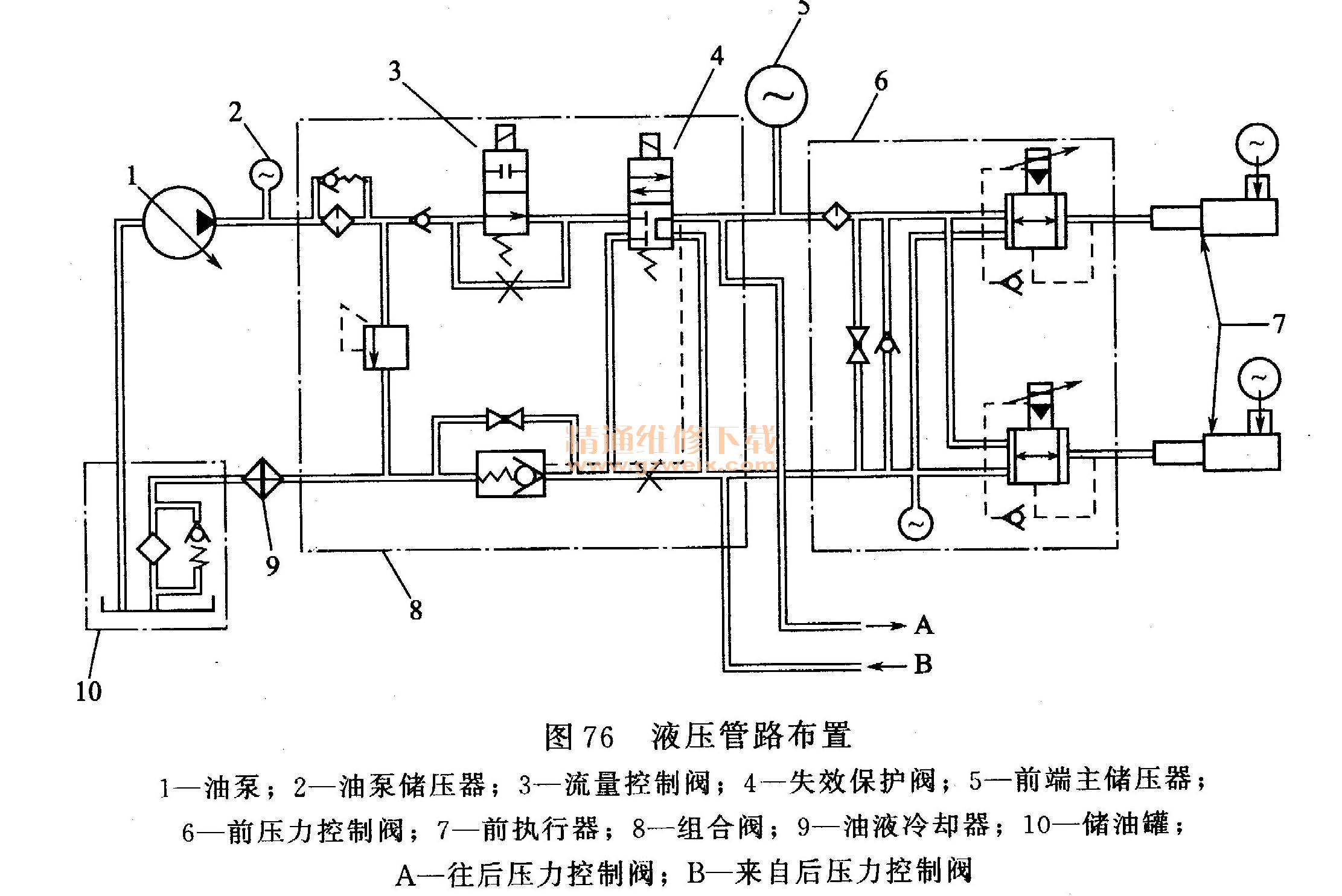
系统的液压管路布置,如图76所示。
FAS系统的工作过程可用图77来说明。使用油泵和带执行器的液压系统,并通过电子控制装置控制,达到改善汽车乘坐舒适和行驶稳定的目的。电子控制装置接收10个独立传感器的输入信号,经过分析计算后向执行器发出控制信号,执行器则根据电子控制装置的控制信号不断调整前、后悬架的液压大小,从而补偿路面的下降、车身的侧倾、制动时的点头、加速时的后蹲和汽车车身高度变化。

上一页 [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] 下一页
")
")
")
")

