・上一文章:添加刻录机后电脑无法启动
・下一文章:分析宝马E66能量管理系统问题引起的抛锚故障
可变助力转向系统解读:
当车速改变时,可变助力转向(VES)系统或MAGNASTEER改变车辆转向所需要的助力。低速时,系统会提供较小的转向助力,以便进行转向和驻车操作。高速行驶时,转向助力加大以提供更坚实的转向能力(路感)和方向稳定性。在动力转向系统中,可变助力转向和扭力杆并行工作。
可变助力控制模块在高速总线上通信,使用车速和方向盘转角速度指令对于齿轮齿条式转向系统中的可变助力执行器各车速最适宜的电流。该执行器的主要部件是一个可变电磁执行器,该执行器由一个多极环形永磁体、一个极片和一个电磁线圈总成组成。通过指令线圈中-3~+3A之间的电流,转向助力随车速得到调整。车辆在约5km/h(3mile/h)低速行驶时,磁力相互排斥,环形磁铁的翻转毫不费力,以这种方式线圈具有极性。车辆中速行驶时,大约70km/h(45mile/h),线圈中没有电流并且方向盘只依靠液压。车辆高速行驶时,磁力相互吸引,环形磁铁的翻转需要很大的力,以这种方式线圈具有极性。
6.巡航控制系统
巡航控制系统电路图如图2-103所示。
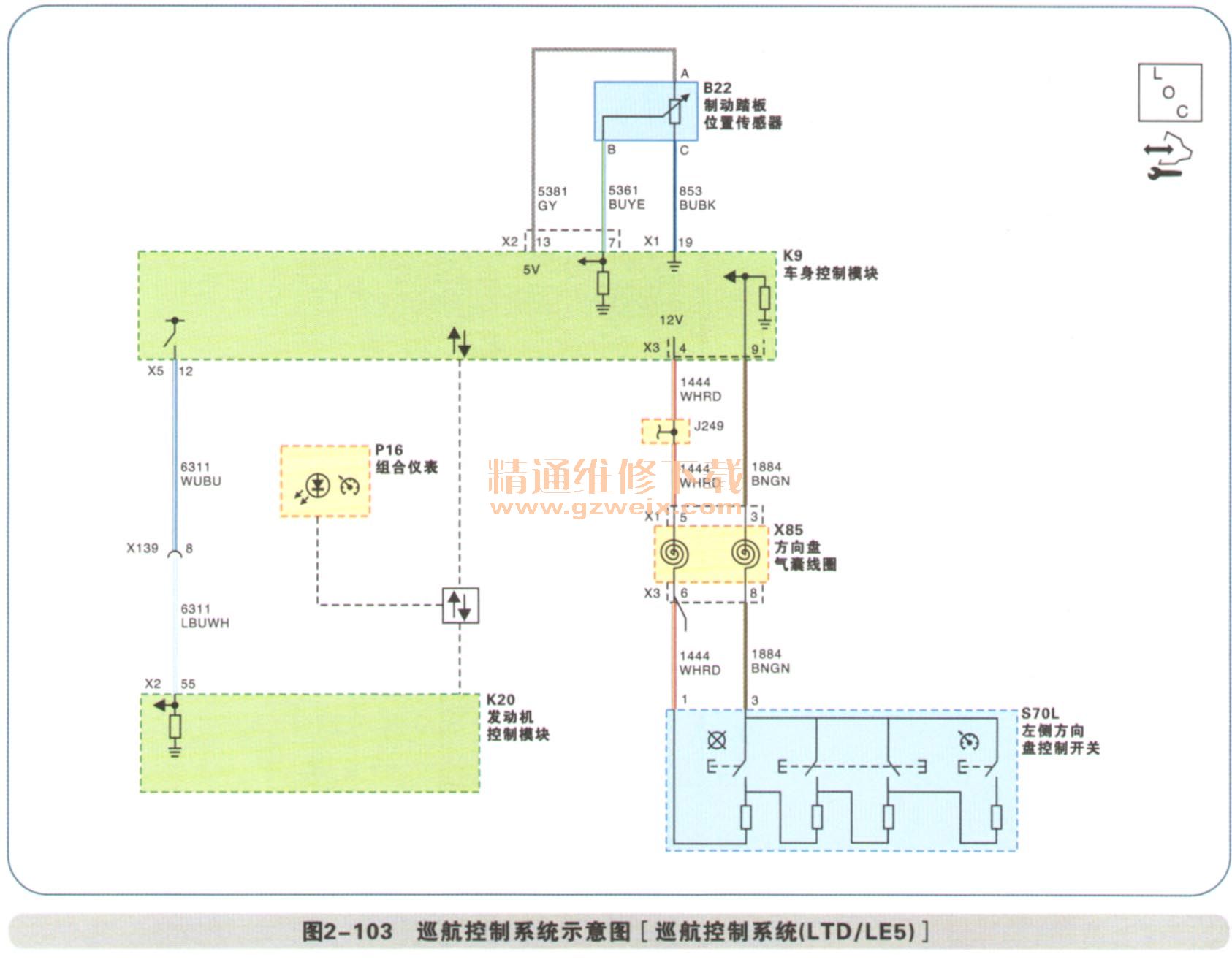
巡航控制系统解读:
巡航控制系统是一个速度控制系统,它在正常行驶条件下保持40km/h(25mile/h)以上的期望车速。陡坡可能会引起所选择车速的变化。
巡航控制系统的主要部件有:加速踏板,制动踏板位置(BPP)传感器,车身控制模块(BCM),巡航接通/关闭开关,巡航控制取消开关,+恢复开关[等同于“resume/accel(恢复功a速)”开关],-设置开关〔等同于“set/coast设置/滑行)”开关〕,发动机控制模块(ECM)节气门执行器控制(TAC)电机,车速传感器等。
车身控制模块(BCM)监测方向盘上的巡航控制开关的信号电路。车身控制系统通过GMLAN串行数据电路将巡航控制开关状态传达至发动机控制模块(ECM)。发动机控制模块运用巡航控制开关的状态来决定什么时候该达到和保持车速。发动机控制模块监测车速信号电路,以决定期望车速。发动机控制模块使用节气门执行器控制电机以保持车速。通过由车身控制模块供电的方向盘控制开关参考电压电路,电压被供给到巡航控制开关。巡航控制功能开关设计为梯形电阻,每个巡航控制功能开关有一个不同的电阻值。车身控制模块检测一个与被启用的巡航控制功能开关相联系的特定电压。当常开型巡航控制接通/关闭开关接通时,该开关闭合。当指示灯点亮时,车身控制模块向指示巡航控制开关“ON(接通)”的指示灯电路提供搭铁。车身控制模块向发动机控制模块发送一个GMLAN串行数据信息,指示“on/off(接通决闭)”开关已经接通。同样,当常开型“+ RES(+恢复)”开关或常开型“-SET(一设置)”开关被按下时,开关闭合,车身控制模块在巡航控制“resume/accel(恢复功口速)”和“set/coast设置/滑行)”开关信号电路上检测预定的电压信号。车身控制模块向发动机控制模块发送一个GMLAN串行数据信息,指示“+ RES(+恢复)”开关或“-SET(一设置)”开关已经启用。当车身控制模块没有从“on/off(接通决闭)”开关接收到预定电压信号时,“+ RES(+恢复)”开关或“-SET(-设置)”开关仍将保持未启动。
7.物体检测
物体检测电路如图2-104和2-105所示。
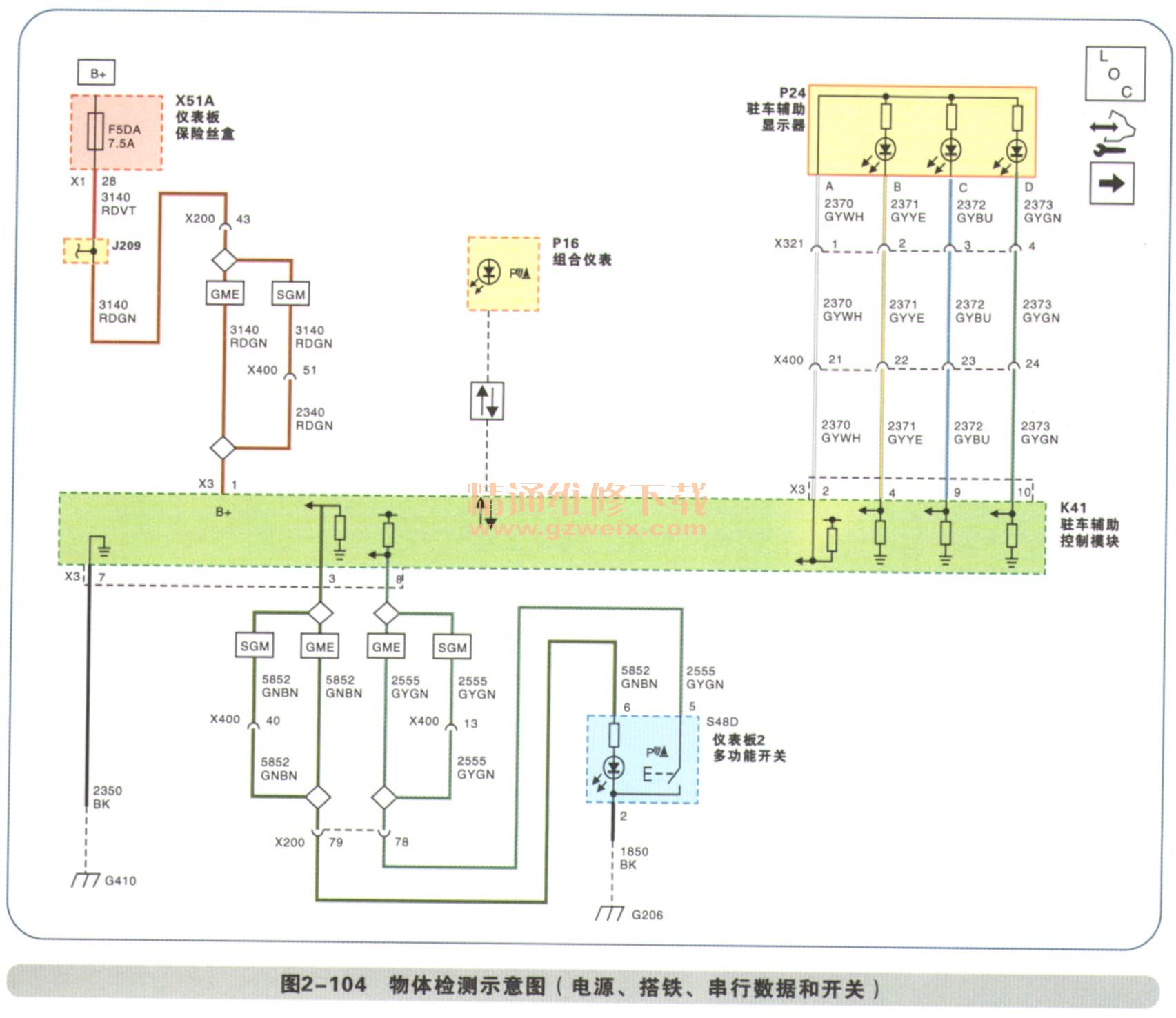
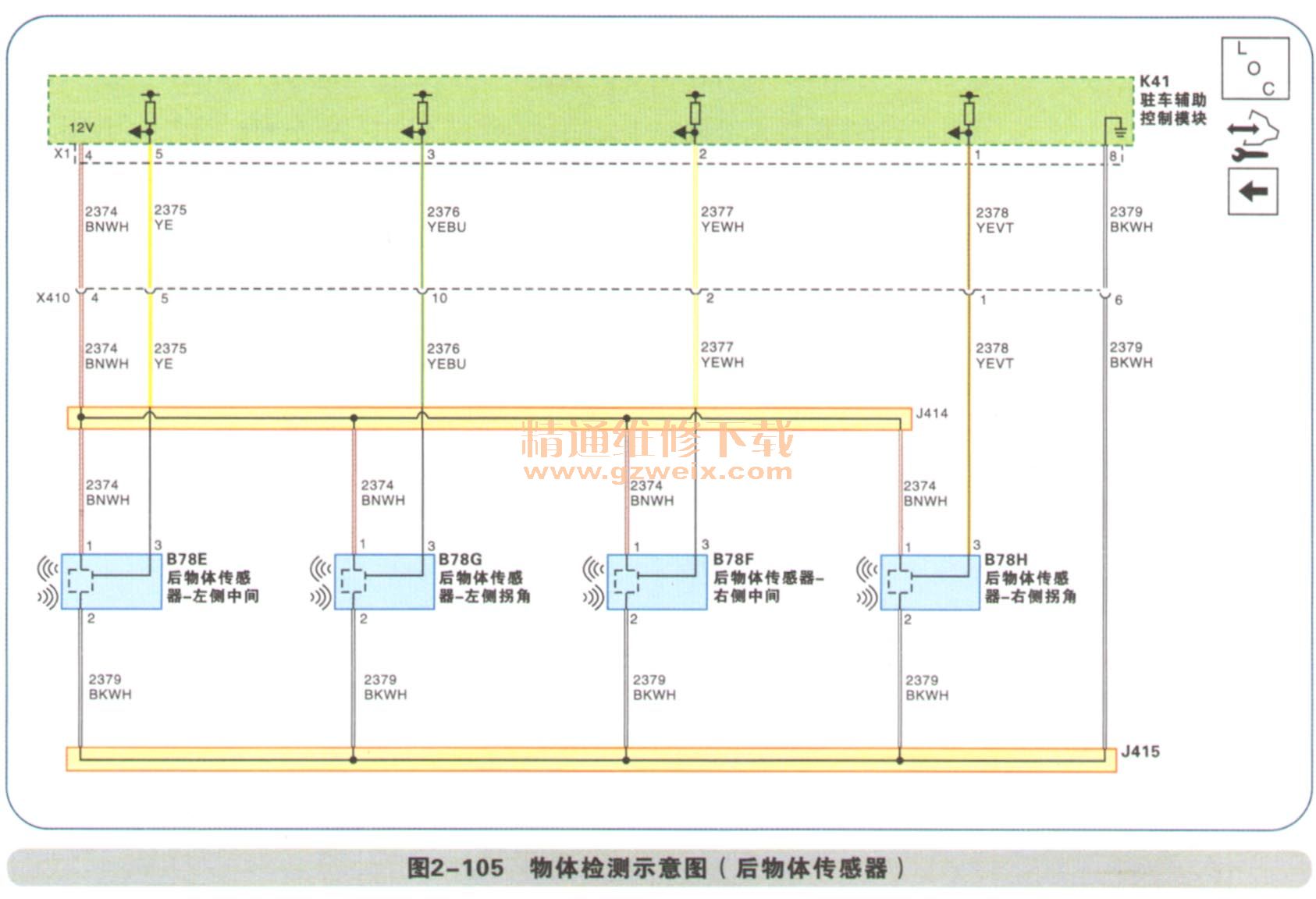
电路解读:物体传感器是3线传感器,用于确定车辆和可疑障碍物之间的距离。物体警报模块通过8V参考电压电路向物体传感器提供8V电压,并通过低电平参考电压电路提供搭铁。物体警告模块在顺序回路中触发传感器每个传感器发射信号后,物体警报模块使用通过信号电路接收到的传感器响铃来计算物体的距离和位置。
超声波驻车辅助系统的设计用于在倒车车速小于8km/h(Smile/h)时,识别并提醒驾驶员车辆行驶路径上的物体。物体的距离和位置由位于后保险杠上的四个物体传感器确定。驻车辅助系统将使用无线电音频信号提醒驾驶员。
上一页 [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] 下一页





